 |
Budowa p³yty g³ównej
Komputery klasy PC s¹
tak skonstruowane tak, aby by³a mo¿liwooæ ich rozbudowy, dlatego te¿ jest tak
wa¿ne odpowiednie dobranie p³yty g³ównej do naszego komputera. P³yta o ma³ej
mo¿liwooci rozbudowy, mo¿e w przysz³ooci ograniczyæ wymianê procesora lub
uniemo¿liwiæ rozszerzenie pamiêci operacyjnej itp.
Dlatego podczas zakupu p³yty g³ównej powinniomy braæ pod uwagê na mo¿liwooci
rozbudowy p³yty g³ównej.

Standardowa
p³yta g³ówna dla komputera PC wyposa¿onego w procesor Pentium zawiera
nastêpuj¹ce komponenty
![]() -
Zasilanie bateryjne
-
Zasilanie bateryjne
![]() - Z³¹cze zasilania p³yty g³ównej: ,
- Z³¹cze zasilania p³yty g³ównej: ,
![]() -
Z³¹cza kontrolera IDE lub E-IDE
-
Z³¹cza kontrolera IDE lub E-IDE
![]() -
Gniada pod modu³y SIMM,
-
Gniada pod modu³y SIMM,
![]() -
Gniazda rozszerzeñ PCI
-
Gniazda rozszerzeñ PCI
![]() -
ISA
-
ISA
![]() -
BIOS
-
BIOS
![]() -
Gniazdo pod procesor
-
Gniazdo pod procesor
![]() -
Kontroler klawiatury
-
Kontroler klawiatury
![]() - Zworki konfiguracyjne
s³u¿¹ do ustawiania parametrów p³yt g³ównej
- Zworki konfiguracyjne
s³u¿¹ do ustawiania parametrów p³yt g³ównej
![]() -
Pamiêæ cech wbudowana jest na sta³e w postaci krzemowych uk³adów scalonych,
-
Pamiêæ cech wbudowana jest na sta³e w postaci krzemowych uk³adów scalonych,
 ISA - Wiêkszooæ komputerów stosowanych w naszym kraju, wyposa¿ona jest w
szynê ISA. Oryginalna magistrala AT-ISA ma 16- bitow¹ szynê danych. Teoretyczna
maksymalna szybkooæ przesy³ania danych wynosi 8 MB/s (gdy¿ dane taktowane s¹
zegarem 8 MHz). W praktyce standard ISA pozwala na traser 1.5 -1.8 MB/s. Jest
to, w porównaniu z szybkooci¹ procesora w¹skie gard³o, powoduj¹ce spowolnienie
pracy komputera.
ISA - Wiêkszooæ komputerów stosowanych w naszym kraju, wyposa¿ona jest w
szynê ISA. Oryginalna magistrala AT-ISA ma 16- bitow¹ szynê danych. Teoretyczna
maksymalna szybkooæ przesy³ania danych wynosi 8 MB/s (gdy¿ dane taktowane s¹
zegarem 8 MHz). W praktyce standard ISA pozwala na traser 1.5 -1.8 MB/s. Jest
to, w porównaniu z szybkooci¹ procesora w¹skie gard³o, powoduj¹ce spowolnienie
pracy komputera.
Z³¹cze ISA sk³ada siê z dwóch sekcji: 62-stykowej i 36-stykowej
PCI (Peripheral Component Intercnnect)- magistrala PCI zosta³a opracowana przez firmê INTEL w roku 1992. Magistrala pracuje z czêstotliwooci¹ 33 MHz, przesy³aj¹c dane ca³a szerokooci¹ 32-bitowej szyny. Pozwala wiêc przesy³aæ dane z maksymaln¹ szybkooci¹ 132 MB/s. wiele wspó³czesnych p³yt wyposa¿onych jest w gniazdo PCI z regu³y trzy sztuki).
W przeciwieñstwie do innych magistrali lokalnych w gnieYdzie PCI mo¿na instalowaæ dowolny sterownik (kontrolem dysków twardych, karty grafiki, sieciowe, multimedialne, itd.) ka¿da wiêc karta pasuj¹ca do gniada PCI bêdzie pracowaæ bez problemów. Magistrala PCI wyposa¿ona jest w 32-bitow¹ multipleksow¹ szynê adresow¹/danych AD[31:0], taktowan¹ zegarem CLK o czêstotliwooci 33 MHz. Magistrala odizolowana jest od procesora centralnego za pomoc¹ po³¹czenia mostkowego - kontrolera wyposa¿onego w bufory.
 Podczas operacji zapisu
procesor przesy³a ci¹g bajtów do bufora, sk¹d pobiera je sterownik PCI od
magistrali lokalnej procesora za pomoc¹ mostka/sterownika pozwala do³¹czyæ
nawet do 10 "odbiorników" PCI Magistrala PCI zosta³a zaprojektowana
dla kart zasilanych napiêciem 5V i3,3V.
Podczas operacji zapisu
procesor przesy³a ci¹g bajtów do bufora, sk¹d pobiera je sterownik PCI od
magistrali lokalnej procesora za pomoc¹ mostka/sterownika pozwala do³¹czyæ
nawet do 10 "odbiorników" PCI Magistrala PCI zosta³a zaprojektowana
dla kart zasilanych napiêciem 5V i3,3V.
Istnieje mo¿liwooæ zainstalowania w gnieYdzie PCI karty
"uniwersalnej" zasilanej napiêciem 5V lub 3,3V - karta kata posiada
z³¹cze z dwoma wyciêciami. Rozszerzona magistralna PCI mo¿e wspó³pracowaæ z
64-bitow¹ szyn¹ danych.
Magistrala 64-bitowa PCI taktowana zegarem 33 MHz osi¹ga maksymaln¹ szybkooæ
wymiany informacji równ¹ 264 MB/s !oczywiocie magistrala ta wymaga zastosowania
z³¹czy 64-bitowych.
Magistrala PCI wyposa¿ona jest w automatyczn¹ konfiguracje - procedury BIOS-u
automatycznie konfiguruj¹ ka¿de nowe urz¹dzenie do³¹czone do magistrali,
uwzglêdniaj¹c przy tym parametry konfiguracyjne innych kart do³¹czonych
wczeoniej do magistrali.
SIMM - W starszych p³ytach g³ównych pamiêæ
operacyjna RAM tworzy³y scalone uk³ady rozmieszczone w dwurzêdowych podstawkach
typu DIP. Np.: 9 uk³ady 41256, daje ³¹czn¹ pojemnooæ 256 k z bitem parzystooci.
Aby uzyskaæ pojemnooæ 1MB, nale¿a³o na p³ycie g³ównej umieociæ 36
"kostek" typu 41256.
Wspó³czesne p³yty
g³ówne wyposa¿ane s¹ w z³¹cza typu SIMM (Sinsle Inline
Memory Modules),
umo¿liwiaj¹ce rozszerzenie pamiêci RAM do kilku dzieciêciu lub nawet kilkuset
MB. Modu³y SIMM s¹ to pod³u¿ne p³ytki na których umieszczono "kostki"
pamiêci, wyposa¿one w z³¹cze krawêdziowe.
Modu³y te wykonywane s¹ w dwóch wersjach 30-stykowej i 72-stykowej i mog¹ mieæ
pojemnooæ od 256 KB do kilku mega bajtów. Obecnie najbardziej popularne wydaj¹
siê SIMM-y o pojemnoociach od 8 do 32 MB, czas dostêpu modu³ów SIMM zawiera siê
w granicach 30 - 40 nanosekund.
 Z³¹cze
typu 30 - stykowego (8 - bitowe) posiada 11 - bitow¹ multipleksowi szynê
adresow¹, która wraz z sygna³ami RAS (strob adresowy wiersza) i CAS (strob
adresowy komórki) pozwala zaadresowaæ do 4 MB przestrzeni adresowej. S 252e41c k¹d te¿
maksymalny rozmiar modu³u SIMM ze z³¹czem 30 - stykowym nie mo¿e przekroczyæ 4
MB.
Z³¹cze
typu 30 - stykowego (8 - bitowe) posiada 11 - bitow¹ multipleksowi szynê
adresow¹, która wraz z sygna³ami RAS (strob adresowy wiersza) i CAS (strob
adresowy komórki) pozwala zaadresowaæ do 4 MB przestrzeni adresowej. S 252e41c k¹d te¿
maksymalny rozmiar modu³u SIMM ze z³¹czem 30 - stykowym nie mo¿e przekroczyæ 4
MB.
Pamiêæ RAM ma czterobajtow¹ organizacje zapisu i odczytu danych - warto o tym
pamiêtaæ przy rozszerzaniu jej pojemnooci. Aby zwiêkszyæ pojemnooæ pamiêci
RAM nale¿y montowaæ po cztery modu³y SIMM jednoczenie (gdy¿ ka¿dy model za
z³¹czem 30 - stykowym zawiera komórki o d³ugooci jednego bajta).
Z³¹cze typu SIMM 72-stykowe posiada 32-bitow¹ szynê danych - do rozszerzenia
pamiêci¹
p³ycie g³ównej wystraszy wiêc jeden modu³!
Modu³y wykonane s¹ w dwóch wersjach: wersja S o pojedynczym upakowaniu (Single density) i wersja D o podwójnym upakowaniu (Double density).
Poni¿sza tabela
prezentuje symbole i odpowiadaj¹ce im pojemnooci 72-stykowych modu³ów SIMM.
|
Symbol |
|
|
Pojemnooæ |
|
256K (S) |
256K x32 bity |
1 MB |
 BIOS - Wszystkie wspó³czesne komputery
PC wykorzystaj¹ specjalny system obs³ugi wejscia/wyjscia zwany BIOS (Basic
Input/Output System) do sterowana funkcjami sprzêtowymi. Po w³¹czeniu komputera
do sieci (lub po wyzerowaniu), BIOS wykonuje testy POST (Power On Sef Test)
procesora i g³ównych bloków funkcyjnych p³yty g³ównej, po czym nastêpuje
inicjacja karty graficznej; na ekranie pojawia siê wtedy informacja o typie
kraty graficznej i systemie BIOS zainstalowanym na p³ycie g³ównej.
Nastêpnie jest wykonywany test pamiêci RAM komputera, a w dalszej kolejnooci
testowana i inicjalizowana jest klawiatura i poszczególne urz¹dzenia do³¹czone
do systemu (mysz, dyski elastyczne i twarde). Rezultat sprawdzania konfiguracji
porównywany jest z zawartooci¹ pamiêci COMS (podtrzymywanej za pomoc¹ baterii
umieszczonej na p³ycie g³ównej), w której u¿ytkownik umieoci³ informacje
dotycz¹ce konfiguracji systemu. W przypadku niezgodnooci sygnalizowany jest b³¹d.
BIOS - Wszystkie wspó³czesne komputery
PC wykorzystaj¹ specjalny system obs³ugi wejscia/wyjscia zwany BIOS (Basic
Input/Output System) do sterowana funkcjami sprzêtowymi. Po w³¹czeniu komputera
do sieci (lub po wyzerowaniu), BIOS wykonuje testy POST (Power On Sef Test)
procesora i g³ównych bloków funkcyjnych p³yty g³ównej, po czym nastêpuje
inicjacja karty graficznej; na ekranie pojawia siê wtedy informacja o typie
kraty graficznej i systemie BIOS zainstalowanym na p³ycie g³ównej.
Nastêpnie jest wykonywany test pamiêci RAM komputera, a w dalszej kolejnooci
testowana i inicjalizowana jest klawiatura i poszczególne urz¹dzenia do³¹czone
do systemu (mysz, dyski elastyczne i twarde). Rezultat sprawdzania konfiguracji
porównywany jest z zawartooci¹ pamiêci COMS (podtrzymywanej za pomoc¹ baterii
umieszczonej na p³ycie g³ównej), w której u¿ytkownik umieoci³ informacje
dotycz¹ce konfiguracji systemu. W przypadku niezgodnooci sygnalizowany jest b³¹d.
Ka¿dy z testów POST ma swój oryginalny numer, ³adowany do rejestru Al. Procesora,
przed wykonaniem w³aociwej procedury testuj¹cej. Dla przyk³adu: test rejestrów
wewnêtrznych procesora ma kod 01H; testowanie zerowego kana³u DMA ma kod 06H;
przed wykonaniem
w³aociwego testu, jego kod przesy³any jest poprzez rejestr Al. Procesora do portu
o adresie 80H. Po wykonaniu procedury testuj¹cej do portu 80H przesy³any jest
kod nastêpnego testu itd. Jeoli Zawartooæ portu bêdzie odczytywana, to w
przypadku b³êdnej pracy testowanego aktualnie bloku komputera, a co za tym
idzie , wstrzymania nastêpnych testów, mo¿emy odczytaæ kod b³êdnego testu.
Oczywiocie testy POST mog¹ siê nieco ró¿niæ w przypadku ró¿nych produktów
BIOS-u (IMB, AMI, AWARD, PHOENIX); w tej sytuacji warto siêgn¹æ do
dokumentacji technicznej badanej p³yty g³ównej, zawieraj¹cej z regu³y opis
kodów punktów kontrolnych.
BIOS posiada wbudowany program SETUP, pozwalaj¹cy u¿ytkownikowi stawiæ
parametry konfiguracyjne komputera. Wejocie do programu jest mo¿liwe po
wykonaniu restartu systemu. Po teocie pamiêci RAM wyowietlony zostanie komunikat
informuj¹c o sposobie uruchomienia tego programu i po nacioniêciu odpowiedniego
klawisz (np. del) lub kombinacji klawiszy.
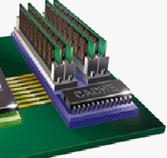
Gniazdo zasilania znajduje siê
najczêociej zaraz obok gniazd pamiêci w prawym, górnym rogu p³yty g³ównej.
W p³ytach ATX jest to 20-stykowe gniazdo, natomiast w p³ytach AT - 12-stykowe.
Pod³¹czenie kabla z zasilacza z koñcówk¹ ATX nie jest trudne. Dziêki
specjalnemu wyprofilowaniu wtyczki i gniazda nie da siê po³¹czyæ zasilania
b³êdnie. Inaczej jest ze standardem AT. Tutaj nale¿y po³¹czyæ dwie bliYniacze,
6-stykowe wtyczki do 12-stykowego gniazda.
.Wa¿ne jest ,aby zosta³y tak pod³¹czone do gniazda, by przewody koloru czarnego (masa) obu wtyczek znajdowa³y siê obok siebie. Uwaga ! Odwrotne po³¹czenie mo¿e spowodowaæ uszkodzenie p³yty g³ównej.
Zasilanie bateryjne. Bateria zasila wewnêtrzny zegar systemowy, ale równie¿ pamiêæ CMOS, w której przechowywane s¹ najwa¿niejsze informacje k0nfiguracyjne jak np. parametry twardego dysku. Istnieje wiele typów pamiêci CMOS, a czas ich ¿ycia znacznie siê ró¿ni. Baterie litowe instalowane w komputerach w ci¹gu ostatnich dwóch lat powinny wytrzymaæ od piêciu do szeociu lat, starsze orednio oko³o trzy lata. Baterie CMOS "umieraj¹" powoli. Zu¿yta bateria powoduje wyowietlanie komunikatu "CMOS Read Error" lub "CMOS Battery Failure" po w³¹czeniu komputera. Oznacza to, ¿e komputer nie wie jak zainstalowaæ dzia³anie komponentów, poniewa¿ straci³ kluczowe informacje o systemie.


Monta¿ p³yty g³ównej w obudowie
 Po zainstalowaniu wczeoniej
wymienionych komponentów na p³ycie g³ównej nale¿y wpi¹æ w odpowiednie otwory
plastykowe ko³ki. Nastêpnie zainstaluj p³ytê tak, aby ka¿dy z plastykowych
ko³ków wszed³ w pod³u¿ny otwór w blacie. Uwaga! W standardzie ATX plastykowe
ko³ki nale¿y najpierw wkrêciæ w blat, a dopiero potem zainstalowaæ p³ytê
g³ówn¹. P³ytê powinno siê tak¿e przykrêciæ do metalowego ko³ka, co usztywni
konstrukcjê.
Po zainstalowaniu wczeoniej
wymienionych komponentów na p³ycie g³ównej nale¿y wpi¹æ w odpowiednie otwory
plastykowe ko³ki. Nastêpnie zainstaluj p³ytê tak, aby ka¿dy z plastykowych
ko³ków wszed³ w pod³u¿ny otwór w blacie. Uwaga! W standardzie ATX plastykowe
ko³ki nale¿y najpierw wkrêciæ w blat, a dopiero potem zainstalowaæ p³ytê
g³ówn¹. P³ytê powinno siê tak¿e przykrêciæ do metalowego ko³ka, co usztywni
konstrukcjê.
Rodzaje p³yt g³ównych
Co to jest procesor?
Centralna jednostka przetwarzaj¹ca (ang. Central Processing Unit) to g³ówny element ka¿dego komputera osobistego, który przetwarza wiêkszooæ poleceñ wydawanych komputerowi. W wiêkszooci komputerów osobistych, CPU jest pojedynczym mikroprocesorem sk³adaj¹cym siê z jednostki steruj¹cej, jednostki arytmetyczno-logicznej i pamiêci roboczej. Rodzaj procesora stanowi bardzo czêsto podstawowe kryterium podzia³u komputerów. Amerykañska firma Intel wyposa¿a wiêkszooæ komputerów PC w procesory Pentium, Pentium MMX, Pentium PRO, Pentium II. Równie¿ amerykañska firma Motorola zajmuje siê produkcj¹ procesorów - ale dla u¿ytkowników komputerów MacIntosh. Z tej firmy pochodz¹ procesory 680x0 oraz PowerPC.

Ju¿ dawno, dawno temu niejaki John von Neumann przy swych teoretycznych rozwa¿aniach o komputerze zak³ada³ istnienie takiego pude³eczka, zwanego roboczo arytmometrem, które by wiedzia³o co robiæ z cyferkami. W dzisiejszych czasach nazywa siê to procesorem, a dok³adnie mikroprocesorem. Rozwój CPU w funkcji czasu mo¿na przedstawiæ jako wykres paraboli, który roonie bez ustanie:
![]() Zasada dzia³ania procesora.
Zasada dzia³ania procesora.
W procesorze uk³ad sterowania dzia³a cyklicznie, wykonuj¹c cykl rozkazowy. Cykl rozkazowy sk³ada siê z dwóch faz.
W fazie pobrania rozkazu na magistralê adresow¹ wysy³ana jest zawartooæ licznika rozkazów. Licznik rozkazów zawiera adres komórki pamiêci, która zawiera rozkaz, który ma byæ w danej chwili wykonany. Po odczytaniu z pamiêci rozkaz wêdruje magistral¹ danych do procesora i wpisuje siê do rejestru rozkazów. Na koñcu fazy pobrania rozkazów uk³ad sterowania zwiêksza zawartooæ licznika o 1.
W fazie wykonania rozkazów uk³ad sterowania odczytuje z rejestru rozkazów rozkaz, dokonuje jego dekodowania i w zale¿nooci od rodzajów rozkazów generuje odpowiednie sygna³y steruj¹ce. We wspó³czesnych procesorach oba te cykle wykonywane s¹ jednoczeonie. W czasie wykonywania rozkazu pobierany jest ju¿ nastêpny. Zbiór wszystkich mo¿liwych do wykonania przez procesor rozkazów nazywamy list¹ rozkazów.
Rozkazy te podzielone s¹ na cztery grupy
Ustaw napiêcie procesora
 Ustawienie
w³aociwej wartooci napiêcia jest niezwykle istotne w prawid³owym funkcjonowaniu
komputera. Zachowaj szczególn¹ uwagê. Ustawienie zbyt wysokiego napiêcia mo¿e
spowodowaæ nadmierne nagrzanie siê procesora, a w efekcie jego awariê lub
awariê p³yty g³ównej. Napiêcie
procesora ustawiamy najczêociej za pomoc¹ zworek (jumperów) lub te¿ (np. w
p³ytach Gigabyte) za pomoc¹ bloku prze³¹czników DIP-Switch. Przy ustawieniu
konieczne jest skorzystanie z instrukcji instalacji p³yty g³ównej.
Ustawienie
w³aociwej wartooci napiêcia jest niezwykle istotne w prawid³owym funkcjonowaniu
komputera. Zachowaj szczególn¹ uwagê. Ustawienie zbyt wysokiego napiêcia mo¿e
spowodowaæ nadmierne nagrzanie siê procesora, a w efekcie jego awariê lub
awariê p³yty g³ównej. Napiêcie
procesora ustawiamy najczêociej za pomoc¹ zworek (jumperów) lub te¿ (np. w
p³ytach Gigabyte) za pomoc¹ bloku prze³¹czników DIP-Switch. Przy ustawieniu
konieczne jest skorzystanie z instrukcji instalacji p³yty g³ównej.
Nale¿y tak¿e wiedzieæ , czy nasz procesor jest zasilany napiêciem DUAL (2,8 -
3,2 V), STD (3,3 V) czy te¿ VRE(3,45 - 3,6 V
Ustaw prêdkooæ zegara procesora
 Analogicznie
jak w przypadku pierwszy nale¿y ustawiæ zworki odpowiedzialne za dopasowanie
p³yty g³ównej do prêdkooci procesora. Chodzi tu g³ównie o ustawienie
czêstotliwooci szyny g³ównej (BUS); 60 lub 66 MHz oraz jej mno¿nika (RATIO);
1,5, 2, 2,5 lub 3. Ustawienie w³aociwych ustawieñ jest proste jeoli np.
instalujemy procesor Intel 166 to musimy stawiæ szynê = 66 i mno¿nik = 2,5
poniewa¿ 66x2,5 = ~` Zwykle zworki odpowiedzialne za
ustawienie procesora znajduj¹ siê w pobli¿u gniazda procesora i s¹ kolorowe.
B³êdne ustawienie zworek prêdkooci nie spowoduje uszkodzenie jakich kolbiek
czêoci komputera , jedynie mo¿e spowodowaæ , ¿e komputer po za³¹czeniu bêdzie
wolniej pracowa³ lub bêdzie siê "zawiesza³".
Analogicznie
jak w przypadku pierwszy nale¿y ustawiæ zworki odpowiedzialne za dopasowanie
p³yty g³ównej do prêdkooci procesora. Chodzi tu g³ównie o ustawienie
czêstotliwooci szyny g³ównej (BUS); 60 lub 66 MHz oraz jej mno¿nika (RATIO);
1,5, 2, 2,5 lub 3. Ustawienie w³aociwych ustawieñ jest proste jeoli np.
instalujemy procesor Intel 166 to musimy stawiæ szynê = 66 i mno¿nik = 2,5
poniewa¿ 66x2,5 = ~` Zwykle zworki odpowiedzialne za
ustawienie procesora znajduj¹ siê w pobli¿u gniazda procesora i s¹ kolorowe.
B³êdne ustawienie zworek prêdkooci nie spowoduje uszkodzenie jakich kolbiek
czêoci komputera , jedynie mo¿e spowodowaæ , ¿e komputer po za³¹czeniu bêdzie
wolniej pracowa³ lub bêdzie siê "zawiesza³".
W³ó¿ procesor w podstawê ZIF
 Monta¿
procesora rozpocznij od zamontowania na nim radiatora z wentylatorem. Zwróæ
uwagê na to, aby oba elementy ociole do siebie przylega³y. Podnieoæ dYwignie
podstawki do pozycji pionowej. Przyjrzyj siê procesorowi./ jeden z czterech
rogów jest lekko ociêty lub oznaczony kropk¹, a uk³ad nó¿ek jest inny ni¿ w
pozosta³ych naro¿nikach. Nale¿y go zatem odpowiednio u³o¿yæ wk³adaj¹c w
podstawkê . nale¿y przy tym uwa¿aæ , aby nie zgi¹æ nó¿ek procesora. Po
dok³adnym w³o¿eniu CPU w podstawkê unieo dYwigniê w pozycje poziom¹ do momentu
zatrzaoniêcia siê.
Monta¿
procesora rozpocznij od zamontowania na nim radiatora z wentylatorem. Zwróæ
uwagê na to, aby oba elementy ociole do siebie przylega³y. Podnieoæ dYwignie
podstawki do pozycji pionowej. Przyjrzyj siê procesorowi./ jeden z czterech
rogów jest lekko ociêty lub oznaczony kropk¹, a uk³ad nó¿ek jest inny ni¿ w
pozosta³ych naro¿nikach. Nale¿y go zatem odpowiednio u³o¿yæ wk³adaj¹c w
podstawkê . nale¿y przy tym uwa¿aæ , aby nie zgi¹æ nó¿ek procesora. Po
dok³adnym w³o¿eniu CPU w podstawkê unieo dYwigniê w pozycje poziom¹ do momentu
zatrzaoniêcia siê.
Rodzaje procesorów.
Rodzaje procesorów wed³ug ich chronologicznego powstania
8086 , 8088 , 80286, 80386DX , 80386SX , 486 , 486DX , 486SX
Pentium , Pentium MMX , Pentium PRO, Pentium II , Pentium III
Wydajnooæ procesorów przedstawiono na wykresie![]()
SZYBKOOÆ PROCESORÓW
Posiada 32-bitow¹ szynê danych i 32-bitow¹ szynê adresow¹. Mo¿e wiêc przes³aæ cztery bajty. Uzupe³nieniem magistrali danych jest czterobitowa szyna parzystooci DP 0:3. Ka¿demu bajtowi szyny danych przyporz¹dkowana jest linia parzystooci (np. bajtowi D7:0 linia DP0, itp.). Magistrala adresowa zawiera 30 linii adresowych oraz cztery linie aktywacji jednego z czterech bajtów szyny danych. Sygna³y te ustalaj¹, które bajty s¹ aktualnie przesy³ane szyn¹ danych. Sygna³ wyjociowy PCHK# informuje system o wykryciu przez procesor b³êdu parzystooci przy odczycie danych.. Za pomoc¹ sygna³ów BS16# i BS8# mo¿na sterowaæ szerokooci¹ szyny danych, gdy¿ mikroprocesor 486 posiada mo¿liwooæ zmiany szerokooci szyny 32-bitowej na 8 lub 16-bitow¹. Mo¿e wiêc wspó³pracowaæ z 8 lub 16-bitowymi urz¹dzeniami zewnêtrznymi.
 Procesor
Pentium ma
64-bitow¹ szynê danych i 32-bitow¹ szynê adresow¹. 64-bitow¹ szynê danych
CD0-CD63, za pomoc¹ której mo¿e przesy³aæ 8 bajtów danych jednoczeonie. 8-bitow¹
szynê parzystooci CP0-CP7, po jednym bicie parzystooci dla ka¿dego bajtu
danych. 32-bitowa szyna adresowa zawiera 29 linii adresowych PA31-PA3 oraz 8
linii (CBE0-CBE7) aktywacji jednego z oomiu bajtów szyny danych. Sygna³y te
ustalaj¹ które
bajty s¹ aktualnie przesy³ane szyn¹ danych. Dwa 8-kilobajtowe segmenty
wewnêtrznej pamiêci podrêcznej Cache (8kB pamiêci podrêcznej danych i 8kB
pamiêci podrêcznej kodu programu), pamiêæ Cache.
32-bajtowe (256 bitowe);
Jeoli podczas operacji odczytu poszukiwanych danych nie ma w posiada komórki
podrêcznej pamiêci wewnêtrznej, procesor siêga po nie do zewnêtrznej pamiêci
Cache (zwanej w tym przypadku pamiêci¹ drugiego poziomu).
Procesor
Pentium ma
64-bitow¹ szynê danych i 32-bitow¹ szynê adresow¹. 64-bitow¹ szynê danych
CD0-CD63, za pomoc¹ której mo¿e przesy³aæ 8 bajtów danych jednoczeonie. 8-bitow¹
szynê parzystooci CP0-CP7, po jednym bicie parzystooci dla ka¿dego bajtu
danych. 32-bitowa szyna adresowa zawiera 29 linii adresowych PA31-PA3 oraz 8
linii (CBE0-CBE7) aktywacji jednego z oomiu bajtów szyny danych. Sygna³y te
ustalaj¹ które
bajty s¹ aktualnie przesy³ane szyn¹ danych. Dwa 8-kilobajtowe segmenty
wewnêtrznej pamiêci podrêcznej Cache (8kB pamiêci podrêcznej danych i 8kB
pamiêci podrêcznej kodu programu), pamiêæ Cache.
32-bajtowe (256 bitowe);
Jeoli podczas operacji odczytu poszukiwanych danych nie ma w posiada komórki
podrêcznej pamiêci wewnêtrznej, procesor siêga po nie do zewnêtrznej pamiêci
Cache (zwanej w tym przypadku pamiêci¹ drugiego poziomu).
Zastosowanie funkcji seryjnego zapisu i odczytu (Burst
Write and Read Function);
Seryjny odczyt polega na jednokrotnym wystawieniu na szynie adresowej (podczas
pierwszego cyklu zegarowego), adresu odczytywanego s³owa z pamiêci RAM, a
nastêpnie w czterech kolejnych cyklach zegarowych odczytanie czterech
64-bitowych danych, w ten sposób, w ci¹gu piêciu cykli zegarowych zostaje
skompletowane 256-bitowe s³owo danych, ³adowane do 256-bitowej komórki pamiêci
Cache.
Pamiêæ podrêczna Cache mo¿e pracowaæ w trybie Write-Back i Write- Trough. Tryb
Write-Back (z opóYnionym zapisem) polega na zapisie danych najpierw do pamiêci
Cache a dopiero póYniej dane przepisywane s¹ do pamiêci RAM. Tryb Write-Trough
dotyczy jednoczesnego zapisu danych do pamiêci Cache i RAM.
 Struktura super skalarna i przetwarzanie danych dwu potokowe
Struktura super skalarna i przetwarzanie danych dwu potokowe
 Procesor
mo¿e wykonaæ dwa rozkazy w ci¹gu jednego cyklu zegarowego, gdy¿ posiada dwie
oddzielne jednostki arytmetyczno-logiczne (tzw. dwa potoki obliczeniowe)
Procesor
mo¿e wykonaæ dwa rozkazy w ci¹gu jednego cyklu zegarowego, gdy¿ posiada dwie
oddzielne jednostki arytmetyczno-logiczne (tzw. dwa potoki obliczeniowe)
Praca w trybie oszczêdnym. Polega na automatycznym prze³¹czeniu w stan
niewielkiego poboru mocy w sytuacji braku sygna³ów wykorzystania procesora.
Wszystkie procesory Pentium zawieraj¹ wewnêtrzny koprocesor arytmetyczny.
Czêstotliwooci zegara: 60, 66, 75, 90, 100, 120, 133, 150,
166, 180, 200 MHz.
MMX.W konstrukcji popularnych procesorów na dobre zadomowi³y siê rozwi¹zania rodem ze owiata maszyn typu RISC. Skomplikowane, czasoch³onne rozkazy architektury CISC s¹ t³umaczone na proste i krótkie rozkazy RISC, wykonywane o wiele sprawniej i szybciej. O tempie pracy bezpoorednio decyduje czêstotliwooæ zegara taktuj¹cego, uzale¿niona od technologii wytwarzania "krzemowych p³ytek". Poniewa¿ czêstotliwooci pracy nie mo¿na jednak zwiêkszaæ bez koñca, poszukano innych sposobów przyspieszenia procesorów. Program komputerowy jest sekwencj¹ rozkazów, które musz¹ byæ wykonane w okreolonym porz¹dku, zao wynik dzia³ania rozkazu czêsto zale¿y od wyniku poprzedniego. W jednym takcie zegara mo¿na jednak wykonywaæ kilka instrukcji (cecha zwana super skalarnooci¹). Nad zachowaniem spójnooci z natury sekwencyjnego procesu czuwaj¹ specjalizowane uk³ady logiczne. Ju¿ Pentium radzi³o sobie z dwoma instrukcjami naraz.
Teraz dodano nastêpne jednostki wykonawcze, które pracuj¹c równolegle zwiêkszaj¹ przy tej samej czêstotliwooci zegara liczbê wykonywanych instrukcji.
 Nowe uk³ady s¹ "super potokowe"-
proces wykonywania pojedynczego rozkazu jest w nich rozbity na kilka prostszych
operacji. Instrukcje bêd¹ce w ró¿nych fazach zaawansowania s¹ przetwarzane
przez odrêbne poduk³ady procesora. Dopuszczalna jest zmiana porz¹dku wykonania
rozkazów (jeoli nie s¹ od siebie zale¿ne), ale po zakoñczeniu s¹ one ponownie
ustawiane we w³aociwej kolejnooci. "Tasowanie" rozkazów pozwala
od³o¿yæ na bok te, które czekaj¹ na dane i nie mog¹ byæ jeszcze wykonane, a
realizowaæ inne, w danej chwili ju¿ kompletne. Na poziomie kodu maszynowego ma
miejsce ci¹g³e przekazywanie sterowania pod inny adres. Skoki dziel¹ siê na
bezwarunkowe i warunkowe. O tych pierwszych wiadomo, ¿e zostan¹ wykonane, wiêc
mo¿na pobieraæ instrukcje spod adresu wskazywanego przez skok znacznie wczeoniej. W
przypadku warunkowych pojawia siê problem, poniewa¿ do momentu ich wykonania
nie wiadomo pod jaki adres nast¹pi skok. Procesor musi wczeoniej zdecydowaæ
sk¹d pobieraæ instrukcje. To "zgadywanie" wspierane jest dynamiczn¹
metod¹
przewidywania skoków. Poniewa¿ pewne partie programu z regu³y wykonuj¹ siê
wielokrotnie, prowadz¹c statystykê poprzednich skoków mo¿na z du¿ym
prawdopodobieñstwem odgadn¹æ adres docelowy.
Nowe uk³ady s¹ "super potokowe"-
proces wykonywania pojedynczego rozkazu jest w nich rozbity na kilka prostszych
operacji. Instrukcje bêd¹ce w ró¿nych fazach zaawansowania s¹ przetwarzane
przez odrêbne poduk³ady procesora. Dopuszczalna jest zmiana porz¹dku wykonania
rozkazów (jeoli nie s¹ od siebie zale¿ne), ale po zakoñczeniu s¹ one ponownie
ustawiane we w³aociwej kolejnooci. "Tasowanie" rozkazów pozwala
od³o¿yæ na bok te, które czekaj¹ na dane i nie mog¹ byæ jeszcze wykonane, a
realizowaæ inne, w danej chwili ju¿ kompletne. Na poziomie kodu maszynowego ma
miejsce ci¹g³e przekazywanie sterowania pod inny adres. Skoki dziel¹ siê na
bezwarunkowe i warunkowe. O tych pierwszych wiadomo, ¿e zostan¹ wykonane, wiêc
mo¿na pobieraæ instrukcje spod adresu wskazywanego przez skok znacznie wczeoniej. W
przypadku warunkowych pojawia siê problem, poniewa¿ do momentu ich wykonania
nie wiadomo pod jaki adres nast¹pi skok. Procesor musi wczeoniej zdecydowaæ
sk¹d pobieraæ instrukcje. To "zgadywanie" wspierane jest dynamiczn¹
metod¹
przewidywania skoków. Poniewa¿ pewne partie programu z regu³y wykonuj¹ siê
wielokrotnie, prowadz¹c statystykê poprzednich skoków mo¿na z du¿ym
prawdopodobieñstwem odgadn¹æ adres docelowy.
Kolejne przewidywania s¹ coraz bardziej precyzyjne. Po przewidzeniu skoku
nastêpuje spekulatywne wykonywanie instrukcji, czyli wstêpne przetwarzanie
rozkazów, które w przypadku b³êdnego wnioskowania mog¹ siê okazaæ zupe³nie
niepotrzebne. Jednak¿e wspó³czynnik poprawnych trafieñ na poziomie 90% (we
wszystkich nowoczesnych uk³adach)zapewnia, ¿e b³êdy, po których trzeba
anulowaæ wykonane ju¿ instrukcje, nie spowalniaj¹ procesora w znacz¹cy sposób.
![]() Technologia MMX jest kolejn¹
nowooci¹ zaimplementowan¹ przez Intela w procesorze Pentium MMX. Technologia
MMX wprowadza 57 nowych rozkazów i 4 typy danych ukierunkowanych na
przetwarzanie danych multimedialnych. Analizuj¹c dostêpne na rynku programy do
edycji grafiki, dYwiêku i wideo, algorytmy kompresji i dekompresji oraz podobne
aplikacje zauwa¿ono wspólne elementy. Wiele algorytmów obliczeniowych
wykorzystuje powtarzaj¹ce siê pêtle obliczeniowe i obs³uguje niewielkie ilooci
danych. Pêtle stanowi¹ poni¿ej 10% kodu aplikacji niejednokrotnie zabieraj¹
nawet 90% czasu przetwarzania ca³ego algorytmu. Nowe rozkazy MMX zwiêkszaj¹
wydajnooæ pracy tych najczêociej wykonywanych funkcji. Ich szczególn¹ cech¹
jest mo¿liwooæ ³¹czenia niewielkich ilooci danych w wiêkszy ci¹g, co pozwala na
szybsze równoleg³e wykonywanie obliczeñ na wielu porcjach danych. Poprzednio
przetworzenie pewnego zbioru wymaga³o wielokrotnego wykonania pojedynczego
rozkazu. Na przyk³ad dla zwiêkszenia jasnooci obrazka trzeba zmodyfikowaæ
wszystkie tworz¹ce go bajty. W tym celu w programowej pêtli ci¹g instrukcji
wykonuje operacje na kolejnych elementach opisuj¹cych przetwarzan¹
grafikê. W rozkazach MMX mo¿liwe jest wykonanie wszystkiego za pomoc¹ jednej
instrukcji. Taki model ³¹czenia niewielkich porcji danych w wiêksze elementy
zwany jest SIMD (Single Instruction - Multiple Data ).Nale¿y podkreoliæ,
¿e technologia MMX to tylko rozszerzenie listy rozkazów procesora. Je¿eli
program tych instrukcji nie wykorzystuje, to nie maj¹ one ¿adnego wp³ywu na
wydajnooæ.
Technologia MMX jest kolejn¹
nowooci¹ zaimplementowan¹ przez Intela w procesorze Pentium MMX. Technologia
MMX wprowadza 57 nowych rozkazów i 4 typy danych ukierunkowanych na
przetwarzanie danych multimedialnych. Analizuj¹c dostêpne na rynku programy do
edycji grafiki, dYwiêku i wideo, algorytmy kompresji i dekompresji oraz podobne
aplikacje zauwa¿ono wspólne elementy. Wiele algorytmów obliczeniowych
wykorzystuje powtarzaj¹ce siê pêtle obliczeniowe i obs³uguje niewielkie ilooci
danych. Pêtle stanowi¹ poni¿ej 10% kodu aplikacji niejednokrotnie zabieraj¹
nawet 90% czasu przetwarzania ca³ego algorytmu. Nowe rozkazy MMX zwiêkszaj¹
wydajnooæ pracy tych najczêociej wykonywanych funkcji. Ich szczególn¹ cech¹
jest mo¿liwooæ ³¹czenia niewielkich ilooci danych w wiêkszy ci¹g, co pozwala na
szybsze równoleg³e wykonywanie obliczeñ na wielu porcjach danych. Poprzednio
przetworzenie pewnego zbioru wymaga³o wielokrotnego wykonania pojedynczego
rozkazu. Na przyk³ad dla zwiêkszenia jasnooci obrazka trzeba zmodyfikowaæ
wszystkie tworz¹ce go bajty. W tym celu w programowej pêtli ci¹g instrukcji
wykonuje operacje na kolejnych elementach opisuj¹cych przetwarzan¹
grafikê. W rozkazach MMX mo¿liwe jest wykonanie wszystkiego za pomoc¹ jednej
instrukcji. Taki model ³¹czenia niewielkich porcji danych w wiêksze elementy
zwany jest SIMD (Single Instruction - Multiple Data ).Nale¿y podkreoliæ,
¿e technologia MMX to tylko rozszerzenie listy rozkazów procesora. Je¿eli
program tych instrukcji nie wykorzystuje, to nie maj¹ one ¿adnego wp³ywu na
wydajnooæ.
![]() W
procesorach MMX dodatkowy zestaw instrukcji wspomagaj¹cych multimedia zosta³ wsparty
przez face-lifting architektury wewnêtrznej. To podnios³o prêdkooæ wykonywania
wszystkich programów. Zwiêkszono pojemnooæ wewnêtrzn¹ pamiêci podrêcznej
procesora z 8 kB dla programów i 8 kB dla danych do 2*16 kB. Poprawiono tak¿e
sposób komunikowania siê procesora z pamiêci¹. Zwiêkszono liczbê buforów zapisu
z 2 do 4. D³ugooæ wewnêtrznych potoków zosta³a wyd³u¿ona o jeden dodatkowy
stopieñ, poprawiaj¹c równoleg³ooæ dzia³ania programów. Z Pentium Pro
przeniesiono "¿ywcem" jednostkê przewidywania skoków i
zaimplementowano stos powrotów znanych z procesora Cyrix. Te wszystkie zmiany
zaowocowa³y 16-procentowym wzrostem wydajnooci wszystkich programów. Dziêki
technologii MMX szybkooæ pracy dedykowanego oprogramowania bêdzie jeszcze
wiêksza. D¹¿¹c do ograniczenia emisji ciep³a Intel wprowadzi³ podwójne napiêcie
zasilania (2,8V dla rdzenia procesora i 3,3V dla uk³adów wejoci-wyjocia). Kto
chcia³ za³o¿yæ u siebie nowy procesor musia³ zaopatrzyæ siê w pozwalaj¹c¹ na to
p³ytê g³ówn¹. Obecnie wszystkie nowe p³yty s¹ "MMX ready". Do takich
w³aonie standardowych p³yt ze standardowym gniazdem Socket 7 przeznaczony jest
procesor AMD - K6. Jednostka centralna oparta na Nx586 przejêtej przez AMD
firmy NexGen ma stanowiæ alternatywê dla systemów klasy Pentium Pro. W zwi¹zku
z tym zmieniono tak¿e wskaYnik obrazuj¹cy wydajnooæ obliczeniow¹ procesorów w
stosunku do Pentium. Dla K5 by³ to P-rating, dla K6 P2-rating. Z³o¿one rozkazy
Pentium rozbijane s¹ na proste instrukcje typu RISC i wykonywane przez
siedem równoleg³ych protokó³ów (do szeociu operacji w jednym cyklu zegara). K6
korzysta ze wszystkich nowoczesnych mechanizmów, takich jak spekulatywne
wykonywanie programu, przemianowywanie rejestrów i przekazywanie danych. W
stosunku do Pentium Pro zwiêkszono tak¿e trafnooæ przewidywania
skoków. Specjalny dwupoziomowy mechanizm zapewnia skutecznooæ rzêdu 95%. Cache
pierwszego poziomu powiêkszono do 32 kB dla instrukcji i 32 kB dla danych.
W
procesorach MMX dodatkowy zestaw instrukcji wspomagaj¹cych multimedia zosta³ wsparty
przez face-lifting architektury wewnêtrznej. To podnios³o prêdkooæ wykonywania
wszystkich programów. Zwiêkszono pojemnooæ wewnêtrzn¹ pamiêci podrêcznej
procesora z 8 kB dla programów i 8 kB dla danych do 2*16 kB. Poprawiono tak¿e
sposób komunikowania siê procesora z pamiêci¹. Zwiêkszono liczbê buforów zapisu
z 2 do 4. D³ugooæ wewnêtrznych potoków zosta³a wyd³u¿ona o jeden dodatkowy
stopieñ, poprawiaj¹c równoleg³ooæ dzia³ania programów. Z Pentium Pro
przeniesiono "¿ywcem" jednostkê przewidywania skoków i
zaimplementowano stos powrotów znanych z procesora Cyrix. Te wszystkie zmiany
zaowocowa³y 16-procentowym wzrostem wydajnooci wszystkich programów. Dziêki
technologii MMX szybkooæ pracy dedykowanego oprogramowania bêdzie jeszcze
wiêksza. D¹¿¹c do ograniczenia emisji ciep³a Intel wprowadzi³ podwójne napiêcie
zasilania (2,8V dla rdzenia procesora i 3,3V dla uk³adów wejoci-wyjocia). Kto
chcia³ za³o¿yæ u siebie nowy procesor musia³ zaopatrzyæ siê w pozwalaj¹c¹ na to
p³ytê g³ówn¹. Obecnie wszystkie nowe p³yty s¹ "MMX ready". Do takich
w³aonie standardowych p³yt ze standardowym gniazdem Socket 7 przeznaczony jest
procesor AMD - K6. Jednostka centralna oparta na Nx586 przejêtej przez AMD
firmy NexGen ma stanowiæ alternatywê dla systemów klasy Pentium Pro. W zwi¹zku
z tym zmieniono tak¿e wskaYnik obrazuj¹cy wydajnooæ obliczeniow¹ procesorów w
stosunku do Pentium. Dla K5 by³ to P-rating, dla K6 P2-rating. Z³o¿one rozkazy
Pentium rozbijane s¹ na proste instrukcje typu RISC i wykonywane przez
siedem równoleg³ych protokó³ów (do szeociu operacji w jednym cyklu zegara). K6
korzysta ze wszystkich nowoczesnych mechanizmów, takich jak spekulatywne
wykonywanie programu, przemianowywanie rejestrów i przekazywanie danych. W
stosunku do Pentium Pro zwiêkszono tak¿e trafnooæ przewidywania
skoków. Specjalny dwupoziomowy mechanizm zapewnia skutecznooæ rzêdu 95%. Cache
pierwszego poziomu powiêkszono do 32 kB dla instrukcji i 32 kB dla danych.
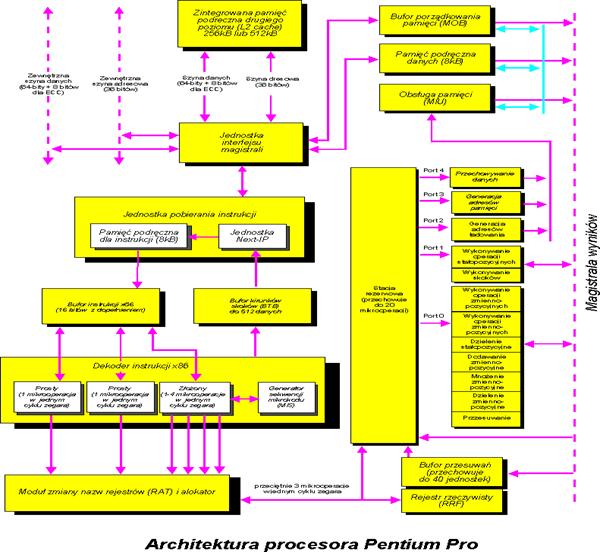 Pod
koniec 1995 roku Intel rozpocz¹³ produkowaæ nowy procesor - Pentium Pro (P6),
który jest bezpoorednim nastêpc¹ procesora Pentium. Przeznaczony on zosta³
g³ównie dla najbardziej wymagaj¹cych u¿ytkowników, korzystaj¹cych z 32-bitowych
aplikacji i 32-bitowych systemów operacyjnych, takich jak Windows NT. Przy
projektowaniu tego procesora jednym z podstawowych za³o¿eñ by³o znaczne
zwiêkszenie wydajnooci procesora Pentium z zegarem 100MHz przy zachowaniu tej
samej technologii produkcji uk³adów pó³przewodnikowych.
Pod
koniec 1995 roku Intel rozpocz¹³ produkowaæ nowy procesor - Pentium Pro (P6),
który jest bezpoorednim nastêpc¹ procesora Pentium. Przeznaczony on zosta³
g³ównie dla najbardziej wymagaj¹cych u¿ytkowników, korzystaj¹cych z 32-bitowych
aplikacji i 32-bitowych systemów operacyjnych, takich jak Windows NT. Przy
projektowaniu tego procesora jednym z podstawowych za³o¿eñ by³o znaczne
zwiêkszenie wydajnooci procesora Pentium z zegarem 100MHz przy zachowaniu tej
samej technologii produkcji uk³adów pó³przewodnikowych.
Jednak¿e nowy procesor Pentium Pro wymaga w przeciwieñstwie do
swego poprzednika przede wszystkim aplikacji 32-bitowych, gdy¿ dla aplikacji
16-bitowych mo¿e okazaæ siê on wolniejszy ni¿ Pentium. W przypadku jednak
prawdziwego systemu 32-bitowego odkrywa on pe³niê swoich mo¿liwooci. Wed³ug
ostatnich testów Pentium Pro przy czêstotliwooci taktowania 150 MHz
jest ponad dwukrotnie szybszy od Pentium z zegarem 120
MHz.
Firma Intel przy projektowaniu Pentium Pro musia³a jednak opracowaæ nowe
rozwi¹zania techniczne, gdy¿ tradycyjna technologia nie pozwala³a ju¿ na
osi¹gniêcie wiêkszej wydajnooci ni¿ uzyskana w przypadku Pentium. Zastosowano
zatem w Pentium Pro wiele rozwi¹zañ technologii RISC. Pentium
Pro jest silnie
super skalarny - mo¿e wykonywaæ a¿ trzy instrukcje x86 w jednym cyklu zegara,
podczas gdy Pentium realizuje dwie operacje w jednym cyklu.
Równoczeonie jest super potokowy, co oznacza ¿e potoki w Pentium Pro
s¹ pojemniejsze i pozwalaj± na osi¹gniêcie wy¿szych czêstotliwooci zegara.
Intel utrzymuje, ¿e technologia super potokowa umo¿liwi stosowanie przy Pentium Pro
zegarów szybszych o jedn¹ trzeci± ni¿ przy procesorze Pentium o takiej samej
technice wytwarzania. Równoczeonie super potokowooæ jest jedn¹ z przyczyn
problemów ze skutecznooci¹ procesora Pentium Pro przy zastosowaniach 16-bitowych
W procesorze Pentium Pro super potokowooæ jest wspomagana mo¿liwooci¹ nie
kolejnego wykonywania instrukcji. Przetasowanie kolejnooci realizacji rozkazów
pozwala od³o¿yæ na bok instrukcje, które czekaj¹ na dane i nie mog¹ byæ jeszcze
wykonane, a realizowaæ inne, ju¿ skompletowane. Pentium
Pro unika
zdarzaj¹cego siê w Pentium, w którym potoki dzia³aj± w ociole okreolonej
kolejnooci, stanu oczekiwania. Organizacja Pentium Pro zapewnia oczywiocie, ¿e wynik
mimo zmiany kolejnooci operacji, pozostanie prawid³owy.
Pentium Pro wewnêtrznie przekszta³ca instrukcjê z zestawu x86 na
rozkazy zbli¿one do uk³adu RISC, zwane przez firmê mikrooperacjami. Upraszcza
to realizacjê bardzo skomplikowanych instrukcji przyjêtych dla x86.
W Pentium Pro umo¿liwiono zmianê nazw rejestrów. U³atwia to zmiany
kolejnooci wykonywania instrukcji i omijania klasycznego w¹skiego gard³a
procesorów x86 - ograniczonej liczby rejestrów przewidzianych w zestawie
instrukcji.
Osobliwooci¹ Pentium Pro woród seryjnie wykonywanych procesorów
jest zamkniêcie w jednej obudowie dwóch uk³adów scalonych: w³aociwego procesora
i szybkiej pamiêci podrêcznej drugiego poziomu o pojemnooci 256 lub 512 KB.
Natomiast magistrala pamiêci podrêcznej jest oddzielona od magistrali pamiêci
operacyjnej, a pamiêæ podrêczna pierwszego i drugiego poziomu nie blokuj± siê
wzajemnie. Magistrala pamiêci g³ównej Pentium Pro mo¿e pracowaæ z szybkoociami
bêd¹cymi ró¿nymi u³amkami szybkooci zegara procesora, które w pocz¹tkowych
wersjach bêd¹ wynosi³y 133 i 150 Mhz.
Uwa¿a siê obecnie, ¿e Pentium Pro w 1996 roku przyjmie siê g³ównie
na rynku serwerów i stacji roboczych. Natomiast powszechna akceptacja Pentium Pro
mo¿e zaj¹æ du¿o czasu, szczególnie jeoli we¼mie siê pod uwagê jego bliskie
zwi¹zki z systemami Windows NT, OS/2 i Unix, z których ¿aden nie ma
dominuj¹cego udzia³u w rynku komputerów osobistych. Przewiduje siê jednak, ¿e w
koñcu Pentium Pro ostatecznie wyprze Pentium, tak samo,
jak Pentium wypar³ procesor 486.
Pentium II
![]() Obudowa Pentium II
Obudowa Pentium II ![]() Dynamiczne wykonywanie rozkazów
Dynamiczne wykonywanie rozkazów ![]() Architektura DIB
Architektura DIB ![]() Parametry
Parametry ![]() Co dalej
Co dalej
Ca³kowicie nowym rozwi¹zaniem opracowanym przez firmê Intel jest obudowa S.E.C (Single Edge Contact). Nazwa ta po Polsku oznacza "Jedno krawêdziowe z³¹cze". Procesor PentiumR II jest pierwszym procesorem firmy Intel produkowanym w nowej obudowie. Dziêki takiej konstrukcji, zarówno sam procesor, jak i pamiêæ podrêczna drugiego poziomu (L2) s¹ zamkniête w jednej obudowie, któr¹ instaluje siê na p³ycie g³ównej na jedno krawêdziowym z³¹czu, a nie na wielostykowej podstawce, co mia³o miejsce w przypadku poprzednich wersji procesorów Intela. Zastosowanie obudowy S.E.C w po³¹czeniu z architektur¹ D.I.B (Dual Independent Bus) umo¿liwia szybsz¹ wymianê danych miêdzy pamiêci¹ podrêczn¹, a procesorem. Ponadto, rozwi¹zanie to posiada wewnêtrzne rezerwy, dziêki którym w przysz³oœci bêdzie mo¿liwe stosowanie pamiêci podrêcznej o wiêkszej pojemnoœci i jeszcze szybszej magistrali wymiany danych miêdzy ni¹ a procesorem
Dynamiczne wykonanie rozkazów jest to po³¹czenie trzech technik przetwarzania danych, które procesor wykorzystuje w celu przyspieszenia wykonania programu
Procesor PentiumR II korzysta z tej samej co procesory PentiumR Pro, wysokowydajnej architektury D.I.B (Dual Independent Bus) Architektura D.I.B zwiêksza szybkooæ przetwarzania danych i zapewnia rezerwê mocy.
Dual Independent Bus oznacza w praktyce, ¿e pamiêæ podrêczna L2 procesorów PentiumR II mo¿e dzia³aæ ponad dwa razy szybciej ni¿ we wspó³pracy z procesorem PentiumR
Parametry techniczne procesora Pentium II
|
Czêstotliwooæ zegara (MHz) | |||
|
Czêstotliwooæ magistrali | |||
|
L1 Cache (I+D) |
16K + 16K |
16K + 16K |
16K + 16K |
|
L2 Cache |
512K |
512K |
512K |
|
Proces produkcyjny |
0,35 mikrona |
0,35 mikrona |
0,35 mikrona |
|
Indeks iCOMP? 2.0 | |||
|
Wydajnooæ |
9.49 SPECINT95 |
10,80 SPECINT95 |
11,70 SPECINT95 |
Pozosta³e dane wszystkich procesorów PentiumR II:
Co dalej: Jak na razie we wiêkszooci nowych komputerów montowane s¹ procesory Intela, na tym polu konkurencja du¿e opóYnienie zapowiada siê dalsza walka. AMD i Cyrix ci¹gle produkuj¹ procesory na Socket 7 i miêdzy nimi trwa tu teraz konkurencja. Intel zapowiada wycofanie produkcji procesorów Pentium koncentruj¹c siê na architekturze Pentium II. G³ówn¹ wad¹ PII jest wci¹¿ stosunkowo wysoka cena tego uk³adu, mimo, ¿e PII 233 Mhz kosztuje mniej, wiêcej tyle samo co P233 Mhz MMX nadal jest to oko³o 1200 z³otych, a gdy doliczyæ koszt drogiej p³yty do PII to zupe³nie przestaje siê to op³acaæ, ale gdy ktoo mo¿e sobie na to pozwoliæ to zachêcam bo warto. Intel, zdaje sobie jednak sprawê z oczekiwañ konsumentowi wypuszcza na rynek Convingtona - ubog¹ wersjê Pentium II, ma ona mieæ t¹ sam¹ architekturê, ale zmniejszony cache i ma byæ nieco mniej wydajna, ale i tañsza. Podchodziæ bêdzie równie¿ do nieco innego gniazdka ni¿ Pentium II
Pamiêæ operacyjna komputera - zwana - pamiêci¹
RAM (Random Access Memory - pamiêæ o swobodnym dostêpu)
s³u¿y do przechowywania danych aktualnie przetwarzanych przez program oraz
ci¹gu rozkazów, z których sk³ada siê ten program.
Pamiêæ RAM jest pamiêci¹ ulotn¹, co oznacza, i¿ po wy³¹czeniu komputera
informacja w niej zawarta jest tracona. Procesor za pomoc¹ swojej 32-bitowej
szyny adresowej mo¿e obs³ugiwaæ pamiêæ o pojemnooci 4GB.
Wielkooæ pamiêci RAM któr¹ mo¿na zainstalowaæ w komputerze IMB PC jest
uzale¿niona od szerokooci magistrali adresowej.
Pierwsze komputery IBM PC z procesorem 8086/88 (popularne XT) narzuci³y pewien
podzia³ pamiêci, kontynuowany w nastêpnych generacjach komputerów. Ca³kowity
obszar 1MB RAM dostêpny dla procesora 8086 zosta³ podzielony, przez
konstruktorów na IBM, na dwa obszary. Pierwszy obszar obejmuj¹cy zakres 0 -
9FFF (0 - 640 KB) nazwany zosta³ pamiêci¹
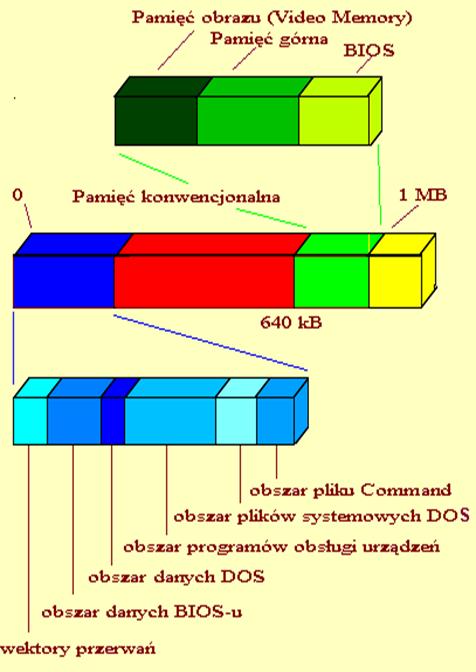
konwencjonaln¹, natomiast obszar o adresie A0000 do FFFFF (640 -
1 MB) to pamiêæ górna.
Pocz¹tkowy
obszar pamiêci konwencjonalnej u¿ywany jest przez sprzêt i system
operacyjny do przechowywania wektorów przerwañ sprzêtowych, danych BIOSU-u,
obszarów buforów i uchwytów plików DOS, a w dalszej kolejnooci ewentualnych
programów obs³ugi (tzw. Driverów) dodatkowych urz¹dzeñ ( np. myszy, klawiatury,
itd.), plików systemowych (lo.sys i MsDOS.sys) oraz pierwszej kopii pliku Command.com.
Obszar ten mo¿e mieæ ró¿n¹ wielkooæ, w zale¿nooci od konfiguracji systemu,
zainstalowanych Driverów i wersji systemu operacyjnego. Zwykle zajmuje to do
300 KB. Pozosta³a przestrzeñ do granicy 640 KB mo¿e byæ u¿yta przez aplikacje.
Pamiêæ
górna (Upper Memory) zajmuje
obszar do adresu A0000 do FFFFF (640 KB - 1 MB) niedostêpny do oprogramowania
u¿ytkownika. Obszar ten (384 KB) podzielony jest na kilka czêoci o ociele
ustalonym przeznaczeniu:
Obszar A0000 - BFFFF (128 KB) przeznaczony jest dla pamiêci ekranu. Koñcowa
czêoæ obszaru Upper Memory przeznaczona jest na ROM BIOS. W zale¿nooci od typu
monitora i karty graficznej oraz wielkooci obszaru zarezerwowanego na BIOS
pozostaje nie wykorzystany obszar tej pamiêci ok.160 -230
KB.
 Pamiêæ rozszerzona (Extended
Memory):
Procesory 286 i nowsze posiadaj¹ ponad 20 bitow¹ magistralê adresow¹
umo¿liwiaj¹c¹ bezpoorednie adresowanie pamiêci RAM powy¿ej 1 MB. Obszar ten
mo¿e byæ wykorzystywany do dowolnych celów za wyj¹tkiem uruchamiana procesów,
gdy¿ te ze wzglêdu na nieci¹g³ooæ obszaru pamiêci mog¹ byæ aktywne jedynie w
obszarze pamiêci konwencjonalnej. Wi¹¿e siê to w³aociwooci¹ systemu DOS, który
mo¿e pracowaæ tylko w trybie rzeczywistym. Lepsze wykorzystanie daj¹
systemy operacyjne pracuj¹ce w trybie chronionym, takie jak Windows i OS.
Pamiêæ rozszerzona (Extended
Memory):
Procesory 286 i nowsze posiadaj¹ ponad 20 bitow¹ magistralê adresow¹
umo¿liwiaj¹c¹ bezpoorednie adresowanie pamiêci RAM powy¿ej 1 MB. Obszar ten
mo¿e byæ wykorzystywany do dowolnych celów za wyj¹tkiem uruchamiana procesów,
gdy¿ te ze wzglêdu na nieci¹g³ooæ obszaru pamiêci mog¹ byæ aktywne jedynie w
obszarze pamiêci konwencjonalnej. Wi¹¿e siê to w³aociwooci¹ systemu DOS, który
mo¿e pracowaæ tylko w trybie rzeczywistym. Lepsze wykorzystanie daj¹
systemy operacyjne pracuj¹ce w trybie chronionym, takie jak Windows i OS.
Szczególne znaczenie w obszarze Extended Memory ma pierwszy blok 64 KB powy¿ej
granicy 1 MB -tzw obszar wysokiej pamiêci (High
Memory Area) . W komputerach z procesorami 286 i nowszymi, przy
zainstalowaniu pamiêci RAM wiêkszej ni¿ 1 MB w wyniku segmentowego sposobu adresacji
pamiêci, istnieje mo¿liwooæ wykorzystania tego obszaru przez DOS i umieszczaniu
w nim zasobów systemu.
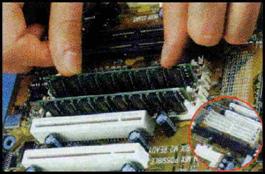 Modu³y SIMM instalujemy w bia³e
pod³u¿ne gniazda z zatrzaskami. Z jednej strony SIMM-y maja specjalne
wg³êbienia, które umo¿liwiaj¹ instalacje uk³adu we w³aociwy sposób. Wg³êbienie
nale¿y spasowaæ ze "schodkiem" w gnieYdzie. Uk³ady nale¿y wk³adaæ w
gniazdo pod k¹tem 45 stopni, a nastêpnie przeci¹gn¹æ do pozycji pionowej, a¿ do
zamkniêcia siê zatrzasków na obu koñcach. Pamiêci musza byæ zainstalowane równo
i ociole. SIMM y nale¿y instalowaæ parami. Oznacza to, ¿e jeoli chcesz mieæ
16MB pamiêci, to musisz kupiæ dwa modu³y SIMM po 8MB lub cztery po 4MB. Jeoli
kupisz dwa, to musisz je zainstalowaæ w gniazdach oznaczonych jako BANK0
Modu³y SIMM instalujemy w bia³e
pod³u¿ne gniazda z zatrzaskami. Z jednej strony SIMM-y maja specjalne
wg³êbienia, które umo¿liwiaj¹ instalacje uk³adu we w³aociwy sposób. Wg³êbienie
nale¿y spasowaæ ze "schodkiem" w gnieYdzie. Uk³ady nale¿y wk³adaæ w
gniazdo pod k¹tem 45 stopni, a nastêpnie przeci¹gn¹æ do pozycji pionowej, a¿ do
zamkniêcia siê zatrzasków na obu koñcach. Pamiêci musza byæ zainstalowane równo
i ociole. SIMM y nale¿y instalowaæ parami. Oznacza to, ¿e jeoli chcesz mieæ
16MB pamiêci, to musisz kupiæ dwa modu³y SIMM po 8MB lub cztery po 4MB. Jeoli
kupisz dwa, to musisz je zainstalowaæ w gniazdach oznaczonych jako BANK0
Pamiêæ ROM
Pamiêæ ROM zwan¹ EPROM . Pamiêæ ta jest pamiêci¹ sta³a co oznacza ¿e po wyt³oczeniu komputera pamiêæ ta nie ginie. Przechowuje ona podstawowe testy diagnostyczne mikrokomputera (POST - Power On Self Test oraz oprogramowanie obs³uguj¹ce urz¹dzenia wejscia/wyjscia, do³¹czone do mikrokomputera (tzw. BIOS). Umieszczona jest w podstawce, dziêki czemu istnieje mo¿liwooæ zmiany jej pojemnooci. Oczywiocie o fakcie zmiany pojemnooci pamiêci EPROM, musi byæ powiadomiony system, poprzez zmianê po³o¿enia odpowiedniej zworki na p³ycie g³ównej. Pamiêæ mo¿emy równie¿ programowaæ za pomoc¹ odpowiedniego programu zwanego SETUP.
Pamiêæ Cache
Ze wzglêdu na bardzo du¿¹ szybkooæ dzia³ania wspó³czesnych procesorów, w komputerach PC stosowana jest szybka pamiêæ podrêczna (Cache Memory) s³u¿¹ do czêsto u¿ywanych danych, stanowi¹ca bufor pomiêdzy woln¹ dynamiczn¹ pamiêci¹ operacyjn¹, a szybkim procesorem. Wszystkie obecnie produkowane procesory (Pentium) wyposa¿one s¹ w wewnêtrzn¹ pamiêæ Cache o pojemnooci kilku, kilkunastu kilobajtów. Pamiêæ oznaczana jest symbolem L1. Ponadto na p³ytach umieszcza siê tzw pamiêæ zewnêtrzn¹ Cache )zwan¹ LP2). Do tego celu wykorzystuje siê bardzo szybkie pamiêci statyczne RAM o niewielkiej pojemnooci (256K-1m.) i o krótkim czasie dostêpu kilkunastu nanosekund). Obecnie produkuje siê specjalne, scalone kontrolery, które steruj¹ prac¹ pamiêci podrêcznej. Dzia³anie kontrolera pamiêci podrêcznej wyjaonimy na przyk³adzie odczytu danych przez procesor z pamiêci operacyjnej: ¿¹danie odczytu danych przez procesor jest przechwytywane przez kontroler, który sprawdza czy dane ,które procesor chce odczytaæ znajduj¹ siê w pamiêci podrêcznej. W sytuacji trafienia (Cache Hit), kontroler przesy³a te dane do procesora, bez koniecznooci czytania ich z wolnej pamiêci operacyjnej, a tym samym, bez koniecznooci wprowadzania cykli niegotowooci. W przypadku chybienia, kontroler odczytuje dane z pamiêci operacyjnej, przesy³a je do procesora oraz jednoczenie wpisuje je do pamiêci podrêcznej. Liczba trafieñ do ca³kowitej liczby odczytów jest wiêksza ni¿ 90%, co oznacza ¿e ponad 90% odczytów jest dokonywanych z pamiêci podrêcznej, a tylko 10% ze znacznej wolniejszej pamiêci g³ównej. Pozwala to wydatnie zwiêkszyæ szybkooæ pracy komputera
Karta kolorowej grafiki EGA
Karta EGA w znacznym
zakresie rozszerza mo¿liwoœci graficzne komputerów IMB PC w stosunku do
standardu reprezentowanego przez kartê CGA.
Rozdzielczoœæ obrazów graficznych jaki mo¿na wyowietliæ pos³uguj¹ siê
karta EGA dorównuje zapewnianym przez popularn¹ kartê grafiki monochromicznej
firmy Hercules Computer Technology.
Pozwala ona nie tylko na czytelne wyprowadzanie tekstu , ale równie¿ wyœwietlanie obrazów graficznych w 16 kolorach, przy rozdzielczoœci
640x350 punktów.
 W
trybie tekstowym matryca znaku wynosi 8x14 punktów. Liczba kolorów które mo¿e
wykorzystaæ u¿ytkownik karty EGA, zale¿noœci od rozmiarów pamiêci obrazu.
W oferowanej przez IBM wersji, karta EGA, zawiera 64 KB pamiêci RAM. Dla tej
pojemnoœci dla trybu 640x350, ka¿dy punkt na ekranie opisany jest za
pomoc¹ dwóch bitów; pozwala to na wykorzystanie czterech kolorów podobnie jak w
CGA. Pamiêæ RAM mo¿e jednak byæ rozszerzon¹ do 128 KB lub 256 KB. Pamiêæ obrazu
o rozmiarze 128 KB pozwala na wykorzystanie 16 kolorów: ka¿demu punktowi na
ekranie przyporz¹dkowane s¹ 4 bity: jeden bit zawiera informacje o kolorze,
drugi o kolorze zielonym, trzeci o kolorze niebieski, czwarty wyznacz
poziom jasnooci. Dalsze rozszerzenie pamiêci do 256 KB nie zwiêksza liczby
dostêpnych na ekranie kolorów, ale umo¿liwia u¿ycie dwóch stron pamiêci obrazu.
Pozwala to na p³ynne przesuwanie zawartooci ekranu i szybk¹ zmianê
wyowietlanego obrazu. Wspomniane 256 KB pamiêci zajmuje jedynie
64 KB przestrzeni adresowej komputera, gdy¿ zasta³o podzielone na cztery mapy
bitowe po 64 KB ka¿da.
W
trybie tekstowym matryca znaku wynosi 8x14 punktów. Liczba kolorów które mo¿e
wykorzystaæ u¿ytkownik karty EGA, zale¿noœci od rozmiarów pamiêci obrazu.
W oferowanej przez IBM wersji, karta EGA, zawiera 64 KB pamiêci RAM. Dla tej
pojemnoœci dla trybu 640x350, ka¿dy punkt na ekranie opisany jest za
pomoc¹ dwóch bitów; pozwala to na wykorzystanie czterech kolorów podobnie jak w
CGA. Pamiêæ RAM mo¿e jednak byæ rozszerzon¹ do 128 KB lub 256 KB. Pamiêæ obrazu
o rozmiarze 128 KB pozwala na wykorzystanie 16 kolorów: ka¿demu punktowi na
ekranie przyporz¹dkowane s¹ 4 bity: jeden bit zawiera informacje o kolorze,
drugi o kolorze zielonym, trzeci o kolorze niebieski, czwarty wyznacz
poziom jasnooci. Dalsze rozszerzenie pamiêci do 256 KB nie zwiêksza liczby
dostêpnych na ekranie kolorów, ale umo¿liwia u¿ycie dwóch stron pamiêci obrazu.
Pozwala to na p³ynne przesuwanie zawartooci ekranu i szybk¹ zmianê
wyowietlanego obrazu. Wspomniane 256 KB pamiêci zajmuje jedynie
64 KB przestrzeni adresowej komputera, gdy¿ zasta³o podzielone na cztery mapy
bitowe po 64 KB ka¿da.
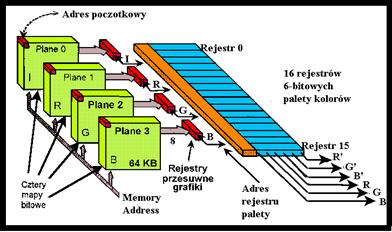
Pierwsza mapa bitowa zawiera informacje o kolorze czerwonym, druga zielonym,
trzecia niebieskim, a czwarta o rozjaonieniu punktów.
Uzyska na wyjœciach rejestrów przesuwnych cztero bitowa informacja IRGB
adresuje jeden z szesnastu 6-bitowych rejestrów palety. Dane zawarte w tych
rejestrach steruj¹
trzema katodami kineskopu kolorowego. Natê¿eniom strumienia elektronów ka¿dej
katody steruj¹ dwa bity. Strumienia elektronów katody "czerwonej"
steruj¹ bitu RR, katody "zielonej" bity GG, katody "niebieskiej"
BB. Ka¿demu wiêc punktowi na ekranie przyporz¹dkowano 6 bitów. Pozwoli to
uzyskaæ 16 z 64 mo¿liwych kolorów. Dla przyk³adu: sygna³y RR mog¹ przyj¹æ
cztery mo¿liwe stany:00, 01, 10, 11. Te cztery stany zamieniane s¹ w torze
wizji na cztery poziomy napiêæ steruj¹cych katod¹ otrzymuje siê cztery poziomy
nasycenia ka¿dego z podstawowych kolorów RGB. Do rejestrów palety u¿ytkownik mo¿e
wpisaæ za pomoc¹ 6-bitowej kombinacji binarnej 16 dowolnych kolorów z 64
mo¿liwych. Rejestry palety adresowane s¹ za pomoc¹ czterech bitów IRGB
wczytywanych z pamiêci obrazu RAM. Dla przyk³adu: kolorowi czerwonemu o
przypisany jest numer 4; kombinacja 0100 adresuje wiêc rejestr o adresie
4. Do rejestru tego u¿ytkownik mo¿e wpisaæ 6-bitow¹ informacje o nastêpuj¹cych
wartoœciach: 000100 - "czerwony o potrójnym nasyceniu" oraz
ka¿d¹ dowoln¹ konbinacjie okreolaj¹c¹ zupe³nie inny kolor. Je¿eli w trakcje
realizacji programu u¿ytkownika, zajdzie potrzeba wyowietlenia punktu
"czerwonego", to na ekranie w danym miejscu pojawi siê kolor odpowiadaj¹cy
kombinacji R'G'B'R'GB odczytanej z rejestru o numerze 4(0100). Sterowanie karty
odbywa siê za pomoc¹ rejestrów wewnêtrznych, umieszczonych w przestrzeni
adresowej I/O w obszarze 1C0...3CF. pamiêæ obrazu karty po³o¿ona jest w
przestrzeni adresowej komputera pocz¹wszy od adresu A0000. Oryginaln¹ karta EGA
pozwala równie¿ pracowaæ w trybach odpowiadaj¹cych kartom; Hercules CGA;
jest to istotne w przypadku korzystania z programów, które zosta³y
przystosowane do pracy z tymi kartami. W trybie MCA do karty EGA mo¿na
pod³¹czyæ monitor monochromiczny o czêstotliwoœci
odchylenia pionowego 18,52 kHz. Oczywiœcie wspó³praca tych monitorów z kart¹ EGA bêdzie
mo¿liwa wtedy, gdy na p³ycie karty za pomoc¹ mikroprze³¹czników i zworek
u¿ytkownik ustawi odpowiedni tryb pracy. Po³o¿enie prze³¹czników i zworek dla
ró¿nych trybów, jest podane w instrukcji obs³ugi karty.
Karta VGA
Parametry które
oferowa³a karta EGA zdecydowanie zwiêkszy³y walory u¿ytkowe komputera z
kolorowym monitorem, w stosunku do karty CGA. Nadal nie by³ to sprzed o
cechach, które by pozwala³y na prowadzenie prac projektowych wspomaganych
komputerem (CAD). Do tego celu miedzy innymi opracowano kartê VGA. Oryginaln¹
karta VGA mo¿e pracowaæ w wielu trybach graficznych, np.: 16 kolorach z rozdzielczooci¹
640 x 480 punktów. Karta VGA pozwala pracowaæ równie¿ w trybach odpowiadaj¹cych
EGA, CGA, oraz MDA.
Poni¿sza tabela ilustruje niektóre typy pracy karty VGA.
|
Numer trybu (Hex) |
RozdzielczoϾ |
Pole znaku |
Liczba kolorów |
Tryb |
|
320x200 |
8x8 |
16/256K |
Tekstowy 40x25 |
|
|
640x200 |
8x8 |
16/256K |
Tekstowy 80x25 |
|
|
320x200 |
4/256K |
Graficzny |
||
|
640x200 |
2/256K |
Graficzny |
||
|
720x350 |
9x14 |
Mono |
Tekstowy 80x25 |
|
|
D |
320x200 |
16/256K |
Tekstowy 58x76 |
|
|
E |
640x200 |
16/256K |
Graficzny |
|
|
F |
640x350 |
Mono |
Graficzny |
|
|
640x350 |
16/256K |
Graficzny |
||
|
640x480 |
2/256K |
Graficzny |
||
|
640x480 |
16/256K |
Graficzny |
||
|
320x200 |
256/256K |
Graficzny |
Mo¿liwooci uzyskania tak szerokiej liczby palety kolorów (256K=262144) wynika z faktu, i¿ karta VGA wyposa¿ona jest w konwertory C/A. Karta VGA wymaga wspó³pracy ze monitorami o specjalnych parametrach: czêstotliwooci odchylenia poziomego równej 31,5 kHz, wejoæ analogowych RGB, itd.
Zasadê pracy karty ilustruje rysunek
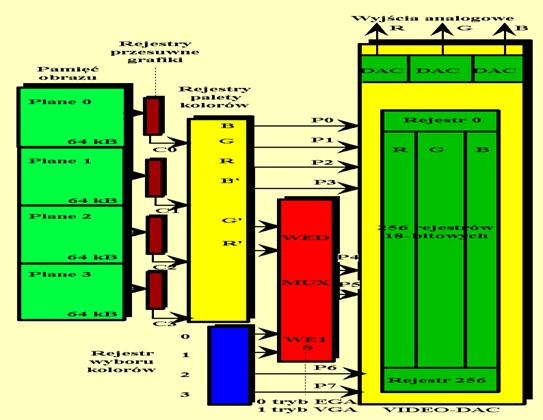
Pamiêæ obrazu RAM
podzielona jest na cztery mapy bitowe po 64 ka¿da. Czterobitowa informacji CO -
C3 wybiera jeden z 16 rejestrów palety. Rejestry te zawieraj¹ bitowe numery kolorów
(R'G'B'RGB). W oœmiu pierwszych rejestrach znajduje siê informacja
o nastêpuj¹cych kolorach: w rej. 0 - kolor czarny, rej 1 - kolor niebieski,
rej. 2 - kolor zielony, rej. 3- kolor cynan, rej. 4 - kolor czerwony, rej. 5 -
kolor purpurowy, rej. 6 - kolor br¹zowy, rej. 7 - kolor bia³y, rej 8-15
znajduj¹ siê te same kolory tylko w wersji rozjaœnionej. Szesnastobitowa
kombinacja wybranego rejestru palety (zaadresowanego bitami C0 - C3) adresuje 1
z 64 rejestrów z zestawu 256 rejestrów 18-bitowych w jakie wyposa¿ony jest
VIDEO - konwerter cyfrowo - analogowy. Ka¿dy rejestr tego zestawu podzielony
jest na trzy 6-bitowe czêœci. Pierwsza czêœæ zawiera informacje o
kolorze czerwonym, druga - o kolorze zielonym, trzecia - o niebieskim. Ka¿dy
wiêc podstawowy kolor opisany jest za pomoc¹ 6 bitów, co pozwala (po konwersji
w przetwornikach DAC) uzyskaæ 64 poziomy napiêæ steruj¹cych ka¿d¹ katod¹ RGB.
Dziêki temu na ekranie mo¿na uzyskaæ 64 poziomy nasycenia ka¿dego podstawowego
koloru (RGB), co po zmieszeniu daje 64*64*64 = 262 144 kolory. Oczywiœcie w trybie
EGA mo¿na wybraæ maksymalnie 16 x 262 144 kolorów. W trybie 13 VGA ka¿demu
punktowi na ekranie przyporz¹dkowano 1 bajt pamiêci obrazu RAM. Bajt ten
wczytany z pamiêci i przes³any przez rejestry palety oraz Rejestr Wyboru
Kolorów na wejœcie konwektora VIDEO-DAC, adresuje 1 z 256 rejestrów
18-bitowych. W rejestrach tych zawarte s¹ 6-bitowe informacje o podstawowych
kolorach. W trybie 13 VGA mo¿e uzyskaæ na ekranie 256 z 262 144 mo¿liwych
kolorów.
Karta VGA zawiera specjalizowany uk³ad scalony tzw. Video
Graphics Controller zawieraj¹cy kontroler CRT, kontroler
graficzny, kontroler atrybutów i uk³ady sekwencyjne. Karta posiada pamiêæ
dynamiczn¹ obrazu RAM o pojemnooci 256 KB. Tego typu pamiêci v charaktezuj¹ siê
multipleksowym wprowadzaniem adresu ze wzglêdu na ma³a liczbê wyprowadzeñ.
Adres z kontrolera jest podawany za pomoc¹ magistrali MD w dwóch fazach:
czêœæ adresu jest wpisywana do rejestru adresowego wierszy wewn¹trz
pamiêci, a pozosta³a do rejestru adresowego kolumn. W ten sposób za pomoc¹
oomiu linii mo¿na przes³aæ 16-bitowy adres. Po przes³aniu adresu, magistrala MD
wykorzystywana jest do przesy³ana danych. Graficzny kontrolrn scalony generuje
równie¿ impulsy synchronizacji poziomej HS i pionowej VS oraz steruje prac¹
konwektora VIDEO-DAC. Karta VGA po³¹czona jest z procesorem za pomoc¹
19-bitowej magistrali adresowej i 8-bitowej magistrali danych. W trybie
tekstowym rolê generatora znaków pe³ni blok pamiêci RAM. Blok ten ³adowany jest
przez system BIOS kilkoma zbiorami znaków o ró¿nych krojach. na rysunku 11
pokazano uproszczony schemat blokowy scalonego sterownika VIDEO-GRAPHICS
CONTROLLER. Uk³ad ten zawiera kontroler CRT, do którego zadañ nale¿y
adresowanie pamiêci RAM podczas odœwie¿ania ekranu. Magistral¹ MEMORY
ADDR. (MA) poprzez multiplekser adresowy wysy³any jest adres, który za pomoc¹
MD0-MD31 wybiera ¿¹dan¹ komórkê w pamiêci RAM.(256 KB). Kontrolen CRT generuje
równie¿ impulsy synchronicznej VS i HS. Dane odczytane z pamiêci obrazu,
³adowane s¹ za pomoc¹ uk³adów odczytu RAM do rejestrów R.Latch. w trybie tekstowym rolê
genarotora znaków pe³ni blok pamiêci PLANE 2. Dane z tego bloku magistral¹
MD16-MD23 poprzez rejestry R.Latch ³adowane do rejestru przesuwnego, sk¹d
przesy³ane s¹ szeregowo na jedno z wejœæ adresowych multipleksera
atrybutów (S0). Multiplekser ten wykorzystuje trzy
wejœcia 4-bitowe, adresowane sygna³ami S1 i S0. Gdy sygna³ S1=0 (tryb tekstowy), szeregowa
informacja z rejestru przesuwnego poprzez wejœcie S0
adresuje jedno z dwu wejœæ: 00 lub 01 multipleksera. na wejœcia te
podawany jest kod atrybutu. Na wyjœciu multipleksera atrybutów pojawi siê wiêc na przemian informacja o
kolorze znaku lub t³a, w zale¿noœci od wartoœci
bitu na wejœciu S0. W trybie graficznym dane wyczytane z pamiêci RAM przesy³ane s¹ magistral¹
MD0 - MD31 do rejestrów przesuwnych grafiki (R0 - R3), w których nastêpuje
zamiana na postaæ szeregow¹. Cztery bity C0 - C3 z wyjœæ szeregowych
rejestrów, przesy³ane s¹ na wejœcie 9 multipleksera atrybutów. Wejocie to adresowane
jest bitem S1 dla trybu graficznego. Wyjocie multipleksera atrybutów adresuje
jeden z 16 rejestrów 6- bitowych. W trybie VGA tylko cztery bity P0 - P3
pobierane s¹ z rejestru palety. Pozosta³e P4 - P7 pochodz¹ z rejestru wyboru
kolorów. Bajt P0 - P7 adresuje jeden z 256 rejestrów w zewnêtrznym konwertorze
VIDEO-DAC. W trybach CGA do przechowywania informacji o obrazie, wykorzystywane
s¹ tylko dwie mapy bitowe, st¹d te¿ u¿ywane bêd¹ tylko dwa rejestry przesuwane
grafiki R0 i R1;pojawiaj¹ siê tylko dwa sygna³y C0 i C1, które mog¹ zaadresowaæ
cztery pierwsze rejestry palety. ZawartoϾ tych
rejestrów adresuje 4 spoœród 256 rejestrów konwertera VIDEO-DAC. Na
ekranie mo¿emy wiêc
uzyskaæ tylko cztery kolory z 262 144 mo¿liwych. W trybie graficznym numer 7
informacja o treoci obrazu przechowywana jest w jednej mapie bitowej PLANE 0. W
trybach graficznych D, E, 10 i 12 (Hex) do przechowywania treoci obrazu
wykorzystywana jest ca³a pamiêæ RAM, co pozwala czteroma bitami C0 - CC3
zaadresowaæ 16 rejestrów palety i tym samym uzyskaæ 16 kolorów na ekranie. W
trybie
13 H pozwala uzyskaæ a¿ 256 kolorów , gdy¿ ka¿demu elementowi obrazu przypisano
bit danych z pamiêci RAM. Bajt ten przesy³any jest z pamiêci w nastêpuj¹cy
sposób: cztery m³odsze bity (P0 - P3) pochodz¹ z rejestrów palety, cztery
starsze bity (P4 - P7)przesy³ane s¹ poprzez rejestr wyboru
kolorów. Tryb 13 H przy 256 kolorach na ekranie, zapewnia rozdzielczooæ 320x200
punktów.
Karta SVGA
Karta VGA by³a ostatni¹ uznan¹ kart¹ za tzw. Standard przemys³owy. Parametry tej karty szybko przesta³y wystarczaæ u¿ytkownikom, wobec powy¿szego wiele firm rozpoczê³o produkcjê kart oferuj¹cych coraz wy¿sze rozdzielczooci i coraz szersz¹ paletê kolorów.
 Karty
tê zwane popularnie kartami SVGA pracuj¹ we wszystkich trybach oryginalnej
karty VGA i posiadaj¹ ponadto dodatkowe niestandardowe tryby pracy. Mog¹ mieæ
od 256 KB do kilku MB w³asnej pamiêci RAM. Karta z pamiêci¹ o pojemnoœci 1
MB mo¿e wyowietliæ obraz o rozdzielczoœci 1024 x 768 w 256 kolorach lub
1280 x 1024 w 16 kolorach. W zasadzie wszystkie wspó³czesne karty SVGA
wyposa¿ane s¹ w trzy 8-bitowe przetworniki VIDEO_DAC, zapewniaj¹ce pracê w
trybie TRUE COLOR, w którym ka¿da sk³adowa RCB koloru, pojedynczego elementu
obrazu, opisana jest za pomoc¹ 8 bitów. Pojedynczy pixel opisany jest wiêc za
pomoc¹ 24-bitowej informacji (trzech bajtów). Pozwala to uzyskaæ na ekranie 256
x 256 x 256 = 16777 16 kolorów (ok. 16,7 miliona kolorów). Wymagana pojemnooæ
pamiêci obrazu karty graficznej jest ociœle uzale¿niona od ¿¹danej
rozdzielczooci i liczby kolorów wyowietlanych na ekranie i mo¿na j¹ obliczyæ
wg. Nastêpuj¹cego wzoru Pojemnooæ[KB] = (Xmax * Ymax)/(8 *
1024) * log2 l. kolorów
Karty
tê zwane popularnie kartami SVGA pracuj¹ we wszystkich trybach oryginalnej
karty VGA i posiadaj¹ ponadto dodatkowe niestandardowe tryby pracy. Mog¹ mieæ
od 256 KB do kilku MB w³asnej pamiêci RAM. Karta z pamiêci¹ o pojemnoœci 1
MB mo¿e wyowietliæ obraz o rozdzielczoœci 1024 x 768 w 256 kolorach lub
1280 x 1024 w 16 kolorach. W zasadzie wszystkie wspó³czesne karty SVGA
wyposa¿ane s¹ w trzy 8-bitowe przetworniki VIDEO_DAC, zapewniaj¹ce pracê w
trybie TRUE COLOR, w którym ka¿da sk³adowa RCB koloru, pojedynczego elementu
obrazu, opisana jest za pomoc¹ 8 bitów. Pojedynczy pixel opisany jest wiêc za
pomoc¹ 24-bitowej informacji (trzech bajtów). Pozwala to uzyskaæ na ekranie 256
x 256 x 256 = 16777 16 kolorów (ok. 16,7 miliona kolorów). Wymagana pojemnooæ
pamiêci obrazu karty graficznej jest ociœle uzale¿niona od ¿¹danej
rozdzielczooci i liczby kolorów wyowietlanych na ekranie i mo¿na j¹ obliczyæ
wg. Nastêpuj¹cego wzoru Pojemnooæ[KB] = (Xmax * Ymax)/(8 *
1024) * log2 l. kolorów
|
Gdzie: |
Xmax - maksymalna liczba punktów wspó³rzêdnej poziomej |
|
|
Ymax - maksymalna liczba punktów wspó³rzêdnej pionowej |
|
RozdzielczoϾ |
16 kolorów |
256 kolorów |
16,7 mln. Kolorów |
|
640x480 |
256KB |
512KB |
2MB |
|
800x600 |
256KB |
512KB |
2MB |
|
1024x768 |
512KB |
1MB |
3MB |
|
1280x1024 |
1MB |
2MB |
6MB |
Z regu³y wszystkie karty SVGA wyposa¿one s¹ akcelerator z 24-bitow¹ palet¹ kolorów (True Color). Karty te mog¹ zawieraæ procesory graficzne 128-bitowe wspomagaj¹ce kartê, oraz BIOS. Pocz¹tkowo karty graficzne SVGA posiada³y z³¹cza ISA. Jest to magistrala o maksymalnej teoretycznej szybkooci transmisji danych wynosz¹cej 8 MB/s. Dla wspó³czesnych kart transfer ten jest zdecydowanie zbyt niski. Aby na ekranie monitora sta³o siê mo¿liwe wyowietlanie filmów z prêdkooci¹ 30 klatek na sekundê, nale¿y odœwie¿aæ pamiêæ karty graficznej 30 razy/sekundê. Wymaga to zastosowania szybkiego z³¹cza takiego jak PCI.
Standard VESA
W roku 1989 amerykañska organizacja Video Electronic Standard Association ustanowi³a pewien standard na sterowniki SuperVGA, zwany od skrótu nazwy organizacji standardem VESA. Zawarte w nim s¹ rozszerzone tryby graficzne sterowników VGA oraz nowa funkcja 4FH przerwania 10H, w której zdefiniowano 8 podfunkcji (00h-07H). Organizacja VESA zdefiniowa³a nastêpuj¹ce tryby pracy sterowników graficznych:
|
Numer trybu (Hex) |
RozdzielczoϾ |
Liczba kolorów |
Numer trybu (Hex) |
RozdzielczoϾ |
Liczba kolorów |
|
640x480 |
10E |
320x200 |
64K |
||
|
640x480 |
10F |
320x200 |
16m. |
||
|
800x600 |
640x480 |
32K |
|||
|
800x600 |
640x480 |
64K |
|||
|
1024x768 |
640x480 |
16m. |
|||
|
1024x768 |
800x600 |
32K |
|||
|
1280x1024 |
800x600 |
64K |
|||
|
1280x1024 |
800x600 |
16m. |
|||
|
80x60 text |
1024x768 |
32K |
|||
|
132x25 text |
1024x768 |
64K |
|||
|
10A |
132x43 text |
1024x768 |
16m. |
||
|
10B |
132x50 text |
1280x1024 |
32K |
||
|
10C |
132x60 text |
11A |
1280x1024 |
64K |
|
|
10D |
320x200 |
32K |
11B |
1280x1024 |
16m. |
Monta¿ karty grafiki w komputerze
Jeoli posiadasz kartê graficzn¹ w standardzie PCI, musisz j¹ umieociæ w pod³u¿nym gnieYdzie PCI (slocie) najczêociej koloru bia³ego, tak aby jej metalowa maska zakry³a pod³u¿ny otwór w obudowie, a gniazdo znalaz³o siê na zewn¹trz.
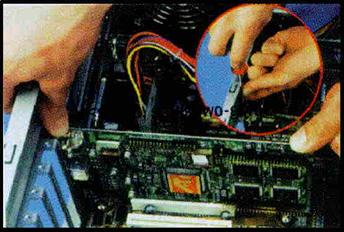 Analogicznej
postêpujemy w przypadku karty ISA, wtykaj¹c j¹ w najd³u¿sze w komputerze z³¹cze
najczêœciej koloru czarnego. W wielu obudowach pod³u¿ne otwory s¹ zakryte
przez przylutowane blaszki. Nale¿y tak¹ blaszkê ostro¿nie wy³amaæ przed instalacj¹
karty. Nale¿y zwróciæ uwagê ¿eby wszystkie styki karty graficznej by³y
równomiernie schowane w slocie, gdy¿ niedok³adne jej zainstalowanie mo¿e
spowodowaæ nieprawid³owe dzia³anie. Kiedy stwierdzimy, ¿e karta zosta³a
prawid³owa pod³¹czona, mo¿emy ja przykrêciæ do obudowy wkrêtem.
Uwaga! Nie nale¿y przykrêcaæ na si³ê, gdy¿ w ró¿nych obudowach s¹ stosowane
wkrêty z drobnym i grubym gwintem. Oczywiœcie instalacja nie koñczy siê na
w³o¿eniu karty do komputera trzeba ustawiæ rozdzielczooæ, liczbê wyowietlanych
kolorów mo¿na tego dokonaæ za pomoc¹ systemu operacyjnego lub z dyskietek
instalacyjnych dostarczonych od producenta.
Analogicznej
postêpujemy w przypadku karty ISA, wtykaj¹c j¹ w najd³u¿sze w komputerze z³¹cze
najczêœciej koloru czarnego. W wielu obudowach pod³u¿ne otwory s¹ zakryte
przez przylutowane blaszki. Nale¿y tak¹ blaszkê ostro¿nie wy³amaæ przed instalacj¹
karty. Nale¿y zwróciæ uwagê ¿eby wszystkie styki karty graficznej by³y
równomiernie schowane w slocie, gdy¿ niedok³adne jej zainstalowanie mo¿e
spowodowaæ nieprawid³owe dzia³anie. Kiedy stwierdzimy, ¿e karta zosta³a
prawid³owa pod³¹czona, mo¿emy ja przykrêciæ do obudowy wkrêtem.
Uwaga! Nie nale¿y przykrêcaæ na si³ê, gdy¿ w ró¿nych obudowach s¹ stosowane
wkrêty z drobnym i grubym gwintem. Oczywiœcie instalacja nie koñczy siê na
w³o¿eniu karty do komputera trzeba ustawiæ rozdzielczooæ, liczbê wyowietlanych
kolorów mo¿na tego dokonaæ za pomoc¹ systemu operacyjnego lub z dyskietek
instalacyjnych dostarczonych od producenta.
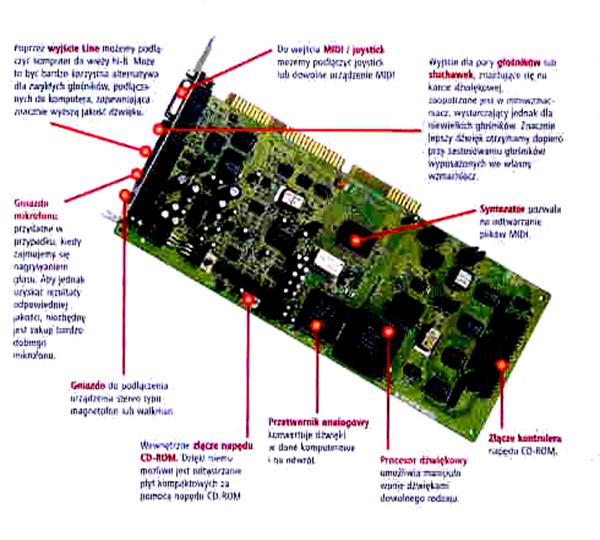
Budowa karty dYwiêkowej
Komputer osobisty ma
standardowo wbudowany ma³y g³oonik, który przeznaczony jest do wydawania pisków
sygnalizuj¹cych np. pope³nienie przez u¿ytkownika b³êdu podczas obs³ugi
sprzêtu. W momencie pojawienia siê gier z efektami dYwiêkowymi, programów do
komponowania muzyki przy wykorzystaniu komputera osobistego oraz programów
multimedialnych zaistnia³a koniecznooæ wprowadzenia urz¹dzenia, które
umo¿liwili wierniejsze rejestrowanie i odtwarzanie dYwiêków.
Zadaniem karty muzycznej jest przystosowanie sygna³ów wychodz¹cych z komputera
do sterowania wzmacniacza elektroakustycznego lub zamiana sygna³ów
przychodz¹cych z mikrofonu, radia, instrumentu muzycznego na postaæ cyfrow¹
(format akceptowany przez komputer).
Do parametrów karty dYwiêkowej nale¿¹
Budowê karty dYwiêkowej przedstawia rysunek
Za pomoc¹ mikrofonu i karty dYwiêkowej mo¿emy wydawaæ
komputerowi polecenia g³osem czy do³¹czyæ do dokumentu s³owne komentarze.
Podyktowany tekst jest zamieniany na zrozumia³y dla komputera ci¹g znaków.
Karta dYwiêkowa jest w takich zastosowaniach urz¹dzeniem wejociowym, jak klawiatura
czy skaner.
Karty dYwiêkowe s¹ czêsto wykorzystywane do nauki jêzyków obcych. Nagrane
próbki wymowy pomagaj¹ nam lepiej poznaæ jêzyk. Karta jest wtedy
wykorzystywana jako urz¹dzenie wyjociowe, podobnie jak monitor..
Metody syntezy dYwiêku
![]() Synteza FM
Synteza FM
![]() Synteza WaveTable
Synteza WaveTable
Sercem wszystkich kart dYwiêkowych jest syntezator. Jest to wyspecjalizowany uk³ad, którego zadaniem jest generowanie dYwiêku i jego obróbka. Dzia³anie najbardziej popularnych obecnie syntezatorów jest najczêœciej oparte na jednej z dwóch metod syntezy dYwiêku: syntezie FM lub syntezie WaveTable.
Synteza FM (Frequency Modulation)
Czyli modulacja czêstotliwoœciowa, zosta³a opracowana w
latach szedziesi¹tych na uniwersytecie w Stanford. Syntezator generuj¹cy dYwiêk
metod¹ FM posiada kilka uk³adów generuj¹cych podstawowe fale dYwiêkowe
(sinusoidalna, kwadratowa, pi³okszta³tna i podobne), które s¹ przepuszczane
poprzez inne uk³ady generuj¹ce obwiednie, vibrato itp., a nastêpnie miksowane.
Po³¹czenie takich uk³adów nazywane jest operatorem. Im wiêksza liczba operatorów
tym bardziej z³o¿one i bli¿sze rzeczywistooci efekty mo¿na uzyskaæ.
Pierwsze uk³ady FM, z których zbudowane by³y najprostsze, ale ju¿ niezale¿ne od
procesora, generatory dYwiêku przerodzi³y siê z czasem w prawdziwe instrumenty
elektroniczne. Przyk³adem mo¿e tu byæ chyba najbardziej znany z tego typu
urz¹dzeñ, syntezator EM DX7 firmy Yamaha .
Firma ta uzyska³a licencjê na stosowanie technologii FM i zosta³a producentem
stosowanych w komputerach generatorów FM poczynaj¹c od trójkana³owych mini
syntezatorów, montowanych w komputerach domowych z lat osiemdziesi¹tych (np.
C64) a koñcz¹c na wykorzystywanych obecnie uk³adach OPL .
Firma Yamaha wyprodukowa³a kilka rodzajów tych uk³adów, wœród których
mo¿na wyró¿niæ :
Przyk³adem uk³adu spe³niaj¹cego podobne funkcje co uk³ady OPL firmy Yamaha a nie bêd¹cego produktem tej firmy mo¿e byæ chip Jazz autorstwa firmy Media Vision . Oprócz niego produkowanych jest równie¿ na podstawie licencji wiele uk³adów posiadaj¹cych w³asne oznaczenia.
Jednymi z najpopularniejszych kart dYwiêkowych, w których
syntezator dzia³a w oparciu o syntezê FM s¹ karty rodziny
Sound Blaster (oparte na wczeœniej wymienionych uk³adach OPL) firmy
Creative Labs
Syntezator karty Sound Blaster zawiera dwa lub cztery operatory FM i
odpowiednio 11 lub 20 kana³ów dYwiêkowych. Czêœæ z tych kana³ów to kana³y
melodyczne, a czêœæ kana³y perkusyjne. Kana³y te ró¿ni± siê miêdzy sob¹
zestawem podstawowych fal dostarczanych przez generatory gdy¿ dla kana³ów
melodycznych s± to fale dYwiêkowe, a dla perkusyjnych jest to szum. W tym
ostatnim przypadku poprzez odpowiednie ustawienie obwiedni mo¿na uzyskaæ efekt
daj¹cy wra¿enie uderzenia w werbel lub talerz. Mo¿liwe oczywiœcie jest
tak¿e przeprogramowanie karty w celu uzyskania dziewiêciu kana³ów melodycznych
gdy kana³ perkusyjny nie jest wykorzystywany.
Przy wykorzystaniu syntezy FM instrumenty to po prostu dane o obwiedni dYwiêku
(czas narastania, wybrzmiewania, opada dania), rodzaju fali dYwiêkowej
wytwarzanej przez generatory itp. Nie mo¿na zatem za pomoc¹ syntezatora
generowaæ mowy lub efektów naœladuj¹cych do z³udzenia rzeczywiste dYwiêki.
Synteza FM pozwala natomiast uzyskaæ (zw³aszcza w nowszych uk³adach) dooæ
wiern¹ imitacjê dYwiêku niektórych instrumentów muzycznych (wibrafon, organy).
W przypadku instrumentów o bardziej z³o¿onym obrazie drgañ otrzymywane dYwiêki maj¹
bardzo sztuczne brzmienie.
Synteza WaveTable (tablica fal)
Jest jednym z najnowszych metod syntezy dYwiêku i opiera siê
na zupe³nie innej koncepcji ni¿ synteza FM. Wykorzystuje ona zdygitalizowane i
przetworzone w czasie rzeczywistym naturalne próbki dYwiêkowe (sample , wielokrotnie odtwarzane w zale¿nooci od
potrzebnej w danym momencie d³ugooci tonu. Wykorzystuje ona tak¿e z³o¿one
algorytmy, umo¿liwiaj¹ce przeliczanie oryginalnych wzorców fal odpowiednio do
¿¹danej wysokoœci dYwiêku.
G³ówn¹ zalet¹ syntezy WaveTable jest mo¿liwoœæ uzyskania bardzo
naturalnych dYwiêków (zw³aszcza przy krótkich tonach oraz w zakresie
wysokoœci dŸwiêku odpowiadaj¹cej oryginalnemu nagraniu).
Jednak im bardziej wysokoœæ i czas trwania tonu bêdzie odbiegaæ od
pierwotnego wzorca, tym sztuczniej zabrzmi dYwiêk imitowany przy u¿yciu tej
metody. Przy u¿yciu WaveTable nie mo¿na tak¿e symulowaæ z³o¿onych modulacji
dYwiêku w d³ugim przedziale czasowym (np: zmiana tonu w przypadku d³ugich
dŸwiêków skrzypiec lub fletu). Kolejnym minusem tej
metody jest koniecznoϾ
przeznaczenia na dYwiêki wzorcowe du¿ego obszaru pamiêci. Standardowe karty
WaveTable s¹ wyposa¿one w tzw. sample-ROM o wielkoœci od 2
do 6 megabajtów. Zazwyczaj im wiêkszy
rozmiar tej pamiêci tym jakoœæ dYwiêków wzorcowych jest lepsza lub jest
ich wiêcej.
Istniej¹ tak¿e karty dYwiêkowe, w których zamiast pamiêci ROM stosuje siê pamiêæ RAM. Przyk³adem mog¹ tu byæ karty
kanadyjskiej firmy Advanced Gravis UltraSound , w których rozmiar pamiêci RAM
przeznaczonej na próbki wynosi od 256 kB od 1 MB. Wad¹ takiego rozwi¹zania jest
koniecznoœæ wczytywania próbek (patchy) do pamiêci co czasami -
szczególnie przy wolniejszych komputerach mo¿e niestety wywo³aæ nieprzyjemne
zatrzymywanie dYwiêku.
Dla posiadaczy starszych kart dYwiêkowych istnieje mo¿liwoœæ poszerzenia
ich mo¿liwoœci o syntezê WaveTable. Mo¿na to uzyskaæ na dwa sposoby:
Synteza WaveTable staje siê coraz bardziej popularna i wiele firm wytwarzaj¹cych karty dYwiêkowe wykorzystuje ju¿ w swoich produktach. Przyk³adem mo¿e tu byæ karta Sound Blaster AWE32 firmy Creative Labs lub karta MultiSound Monterey firmy Turtle Beach Systems .


Budowa
obwodowy
Standardowa obudowa dla PC sk³ada siê z nastêpuj¹cych elementów:
Wraz z obudow¹ dostajemy komplet niezbêdnych elementów do monta¿u obudowy
 |  |  |  |
||||
Budowa zasilacza
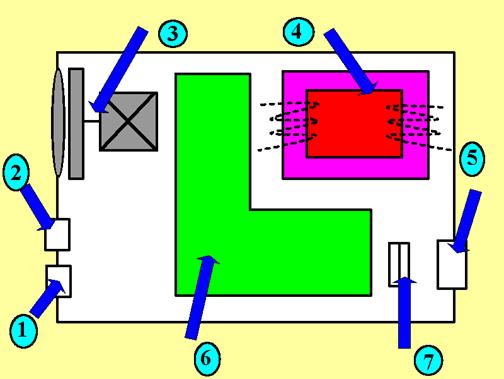
Wa¿nym elementem komputera
jest zasilacz, s¹ to najczêociej zasilacze impulsowe. Aby dokonaæ w³aociwego
wyboru zasilacza nale¿y siê zastanowiæ nad przeznaczeniem komputera.
Najczêociej stosowanymi zasilaczami s¹ zasilacze o mocy 135 W, co pozwala na
bezpieczne u¿ywanie zestawu podstawowego, przy próbach dodania karty muzycznej,
CD-Rom-u mo¿e siê okazaæ ¿e jego moc jest za ma³a, jeoli dojdzie do
przeci¹¿enia zasilacza to ulegnie on uszkodzeniu. Jeoli chcemy uchroniæ siê
przed zaskoczeniem przy instalowaniu nowej "zabawki", nale¿y
zaopatrzyæ siê w zasilacz o mocy co najmniej 200 W nawet 350 W.
Poszczególne elementy zasilacza:
Rodzaje obudowy
Rynek komputerów klasy zosta³ zdominowany przez szeoæ typów obudowy. S¹ to:
Obudowa super slim (80x320x330)
Zalety:
Wady
Obudowa slim (430x110x400)
Zalety
Wady
Obudowa baby (180x340x410)
Zalety
Wady
Obudowa mini tower (340x180x410)
Zalety
Wady
Obudowa midi tower (180x460x440)
Zalety
Wady
Obudowa big tower (180x580x470)
Zalety
Wady
Dysk CD - ROM

Dysk CD-ROM na pierwszy
rzut oka nie ró¿ni siê niczym od dysku kompaktowego. Dysk CD - ROM jednak
zawiera dane komputerowe, podobnie jak dyskietka lub twardy dysk, nie muzykê,
jak dysk CD. CD-ROM to skrót od Compact Disc Read
Only Memory
Na dysku CD-ROM mo¿na
zapisaæ do 650 MB danych, porównuj¹c to z dyskietkami 1,2 MB i 1,44 MB ³atwo
policzyæ, ¿e na jeden dysk CD mo¿na nagraæ tyle informacji. Ile na kilkaset
dyskietek. Przy tym koszt produkcji dysku CD-ROM jest zbli¿ony do kosztu
produkcji jednej dyskietki. Dlatego te¿ dyski CD to najtañszy sposób
przechowywania du¿ych iloœci danych lub skomplikowanych i rozbudowanych
programów. S¹ te¿ one wygodniejsze: ³atwiej siê pos³ugiwaæ siê jednym dyski lub
kilkoma dyskietkami.
Na powierzchnia dysku CD-ROM znajduje siê spiralna ocie¿ka o d³ugooci oko³o 6
km. ocie¿ka sk³ada siê z wypuk³ooci i wg³êbieñ pokrytych warstw¹ odbijaj¹c¹
zazwyczaj jako warstwê odbijaj¹c¹ stosuje siê aluminium i ¿adnej z³oto, zaœ
sama kr¹¿ek jest wykonany dooæ sztywnego tworzywa sztucznego.
Spotykane s¹ dwa rodzaje dysków:
Dysk CD-ROM mo¿e byæ odczytywany tylko z jednej strony.
Nale¿y pamiêtaæ aby nie uszkodziæ powierzchni dysku i zachowaæ j¹ w jak
najwiêkszej czystooci, poniewa¿ zbyt du¿e rysy na powierzchni dysku mog¹
spowodowaæ du¿e zak³ócenia podczas odczytu dysku lub uniemo¿liwiæ jego odczyt.
Odczyt dysku CD-ROM
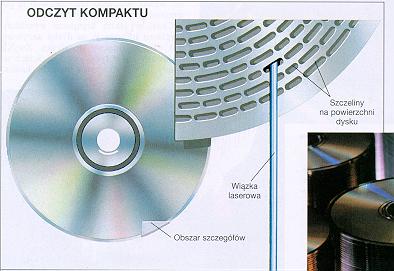
Podobnie jak dysk
kompaktowy , dysk CD-ROM jest odczytywany przez promieñ lasera biegn¹cy po jego
powierzchni, przy czym ró¿ne s¹ wartooci odbijaj¹ce dla wg³êbieñ i wypuk³ooci.
Kiedy promieñ natrafi na
g³adkie miejsce, owiat³o lasera zostaje odbite i zarejestrowane jako
"zero", gdy promieñ natrafi na do³ek, owiat³o nie zostaje odbite
(ulega rozproszeniu) i nie wraca do mechanizmu odczytuj¹cego: fakt ten zostaje
zarejestrowany jako "jeden" Odbity promieñ lasera jest kierowany przez
system prymów i luster do fotodetektora, który zrejestruje otrzymywane dane.
Mechaniz stacji CD-ROM przetwarza te dane na zrozumia³e dla komputera
informacje.
Poniewa¿ do wypalania do³ków ( i póYniej do ich odczytywania ) u¿ywa siê
laserów, do³ki te mog¹ byæ rozmieszczone precyzyjne, a tym samym o wiele
gêociej. Dlatego na dysku o orednicy 4,5 cala mo¿e siê zmieociæ 650 megabajtów
danych.
Stacja CD-ROM
Stacje CD - ROM coraz czêœciej sprzedawane s¹ jako
standardowe wyposa¿enie komputera. Stanowi¹ one wówczas stacje wewnêtrzne (internal Drives) umieszczane s¹ one w obudowie
komputera podobnie jak stacja du¿ych dysków 1,2 Mb, i zajmuj¹ mniej wiêciej
tyle samo miejsca. Istniej¹ równie¿ stacje zewnêtrzne (external driver po³¹czone z komputerem kablami
posiadaj¹ w³asny zasilacz.
Obecnie u¿ywane stacje (napêdy) do odtwarzania CD - ROM-ów wykorzystuj¹
czerwon¹ wi¹zkê lasera. Badania potwierdzaj¹ ¿e zastosowanie niebieskiego
lasera znacznie zwiêkszy pojemnooæ dysków CD - ROM.
Stacja CD - ROM oprósz lasera czyli serca stacji zawiera nastêpuj¹ce komponenty:
Parametrami charektuzuj¹cymi napêd CD - ROM s¹:
Monta¿ CD - ROM w
komputerze
Napêd CD - ROM instalujemy
w koszyku obudowy 5,25 cala. Nale¿y go przykrêciæ czteroma wkrêtami z drobnym
gwintem. Zasilanie pod³¹czamy takim samym wtykiem jak twardy dysk z zachowaniem
ano logicznych zasad.
Z ty³u napêdu obok 40-szpilkowego gniazda danych i 4 szpilkowego gniada
zasilania znajduje siê prze³¹cznik zworkowy to w³aonie na nim ustawia siê
kolejnooæ urz¹dzenia w systemie. Aby zatem ustawiæ czytnik CD -ROM jako
pierwszy (MASTER) zewrzyj zwork¹ szpilki oznaczone MA.
Nastêpnie drug¹ taoma pod³¹cz do gniada na p³ycie g³ównej oznaczonego jako IDE1 lub HDD2 (czyli do drugiego kana³u IDE).W przypadku gdy mamy tylko jedno gniazdo IDE na p³ycie g³ównej lub tez mamy ju¿ pod³¹czone trzy urz¹dzenia EIDE, powiliomy ustawiæ CD -ROM w trybie SLAVE (zworka SL lub SV). Pod³¹czenie napêdu jako drugiego nowino byæ realizowane przez zastosowanie taomy danych z trzema wtykami, gdzie jeden z nich pod³¹czony jest do p³yt g³ównej, a dwa pozosta³e do dysku twardego (MASTER) i napêdu CD - ROM (SLAVE) ca³y czas zachowuj¹c zasadê czerwony przewód taomy - pin nr. 1.
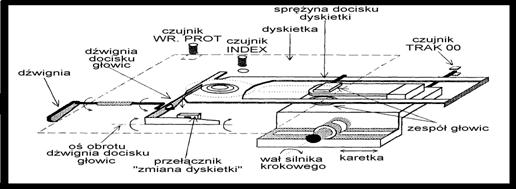
Budowa stacji dysków
elastycznych
Rozwi¹zania konstrukcyjne napêdów dyskietek
ró¿ni¹ siê g³ównie sposobem przesuwu g³owic. We wszystkich rozwi¹zaniach
zastosowano optyczne wykrywanie otworu indeksowego (czujnik INDEX).
Dodatkowy czujnik optyczny rozpoznaje, czy g³owica osi¹gnê³a ocie¿kê 0 (czujnik
TRACK 00). Istnieje te¿ inny czujnik optyczny, badaj¹cy stan wyciêcia
zabezpieczaj¹cego przed zapisem, umieszczonego na krawêdzi obudowy dyskietki
(czujnik WR PROT).
Wyciêcie to mo¿emy zakleiæ paskiem nieprzezroczystej folii, je¿eli na dyskietce
nie chcemy zapisywaæ informacji. Najczêociej g³owice przesuwane s¹ za pomoc¹
taomy stalowej nawiniêtej na wale silnika krokowego i koñcami przymocowanej do
karetki. W starszych typach stacji dyskowych lini¹ Head Load
uaktywniany by³ elektromagnes docisku g³owicy (po w³¹czeniu), który zapewnia³
kontakt fizyczny g³owicy z dyskiem. Aby dokonaæ wymiany dyskietki, nale¿y
otworzyæ kieszeñ pamiêci dyskowej, wyj¹æ dyskietkê i w³o¿yæ now¹. Fakt ten jest
rejestrowany sygna³em pojawiaj¹cym siê na 34 lini interfejsu FDD o nazwie Changle
Disk (pochodz¹cy z mikroprze³¹cznika "zamiana dyskietki"
Sterowanie uk³adem zawiera uk³ady: pozycjonowania g³owic, zapis i odczytu
danych, uk³adu stabilizacji prêdkooci obrotowej silnika napêdu dysku oraz
uk³adu formatowania impulsów z czujników fotoelektrycznych.
Budowa dysku elastycznego
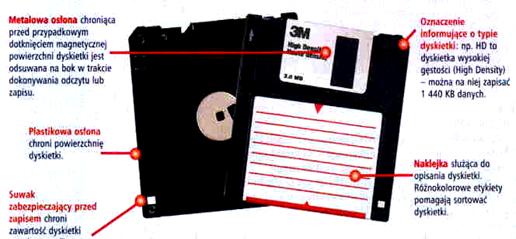
Dysk elastyczny - dyskietka jest to kr¹¿ek wykonany z giêtkiego
tworzywa sztucznego, pokryty warstw¹ materia³u magnetycznego. Grubooæ kr¹¿ka z
folii jest mniejsza ni¿ 1/10 mm, a grubooæ warstwy magnetycznej wynosi tylko
0,0025 mm. Zapis danych odbywa siê na koncentrycznych ocie¿kach, których liczba
mo¿e byæ równa 35, 40 lub 80. Pocz¹tek ka¿dej ocie¿ki jest ³atwo rozpoznawalny
dziêki temu, ¿e obudowa i dyskietka maja specjalne otwory, przez które
przechodzi owiat³o w momencie ich pokrywania siê. Zwykle orednice dyskietek
wynosz¹; 5,25 lub 3,5 cala.
W najbardziej rozpowszechnionych komputerach u¿ywa siê dyskietek o pojemnoociach 360 KB, 720 KB, 1,2 MB lub 1,44 MB. Na pocz¹tku ka¿dej ocie¿ki zgodnie z formatem ISO-MFM, wystêpuje przerwa nr1 (Gap1). Ocie¿ka podzielona jest na pewn¹ liczbê sektorów, o jednakowej d³ugooci. Sektor sk³ada siê z pola indefikatora i pola danych. Pola: indefikatora i danych oddzielone s¹ przerw¹ nr2 (Gap2).
Zawsze na koñcu pola danych wystêpuje przerwa nr3 (GAP3), która koñczy siê wraz z koñcem sektora. Pomiêdzy ostatnim sektorem a pocz¹tkiem ocie¿ki znajduje siê przerwa nr4 (Gap4). Na pocz¹tku ka¿dego pola znajduje siê blok synchronizacji (SYNC) zawieraj¹cy 12 bajtów zerowych. Formaty przerw zale¿¹ od metody i szybkooci zapisu oraz typu stacji dysków. Dla standardu IS0-MFM s¹ nastêpuj¹ce: Gap 1zawiera 32 bajty 4e, gap 2 zawiera 22 bajty 4E, gap 3 jest przerw¹ programowan¹, gap 4 zawiera tylko bajty jedynkowe. Pole indefikatora sk³ada siê z nastêpuj¹cych bloków.
Zapis i odczyt na dysku elastycznych
Informacja
na dyskach mo¿e byæ zapisywana
z pojedyncz¹ gêstooci¹ (Single Density, SD), z podwójn¹ gêstooci¹ (Double Density, DD) lub z wysok¹ gêstooci¹ (High
Density, HD).
Czêsto gêstooæ zapisu podawana jest w bitach na cal.
Wszystkie typy pamiêci na warstwach magnetycznych dzia³aj¹ na tej samej
zasadzie; na poruszaj¹cej siê warstwie magnetycznej dokonywany jest zapis
informacji polegaj¹cy na odpowiednim przemagnesowaniu pól noonika informacji.
Zapis i odczyt dokonywany jest za pomoc¹ g³owicy. G³owicê nazywamy rdzeñ z
nawiniêt¹ na ni¹ cewka i niewielk¹ szczelin¹ miedzy biegunami. Zapis informacji
sprowadza siê do namagnesowania poruszaj¹cego siê noonika. Pole magnetyczne
wytworzone w szczelinie magnesuje noonik tak d³ugo, jak d³ugo p³ynie pr¹d w
cewce g³owicy. Namagnesowany odcinek noonika zachowuje siê jak zwyk³y magnes
wytwarzaj¹c w³asne pole magnetyczne. Istnieje wiele metod zapisu informacji
cyfrowej na nooniku magnetycznym.
Metoda bez powrotu do zera
Polega na tym, ¿e zmiana kierunku pr¹du w g³owicy zapisu nastêpuje w chwili zmiany wartooci kolejnych bitów informacji. Zmiana kierunku pr¹du nie wystêpuje podczas zapisywania ci¹gu zer lub jedynek. Metoda ta nie posiada mo¿liwooci samo synchronizacji, tzn z informacji odczytanej nie da siê wydzieliæ impulsów okreolaj¹cych po³o¿enie komórki bitowej.
Metoda modulacji czêstotliwooci (FM)
Polega na tym, ¿e przy modulacji FM pr¹d w g³owicy zapisu zmienia na pocz¹tku ka¿dej komórki bitowej, oraz w orodku komórki, gdy zapisywany bit ma wartooæ "jedynki"
Metoda zmodyfikowanej modulacji czêstotliwooci (MFM)
Metoda MFM nazywana jest metod¹ z podwójn¹ gêstooci¹ i dziêki niej jest podwojona jest pojemnooæ dysku twardego, stosuje siê tu regu³ê: bit o wartooci "1" ustawia impuls zapisuj¹cy poorodku komórki bitowej, bit o wartooci "0", ustawia impuls na pocz¹tku komórki bitowej lecz tylko wtedy, gdy poprzedni bit nie jest równy "1". W metodzie tej dla odtwarzania danych, w trakcie odczytu, stosowany jest uk³ad z pêtl¹ synchronizacji fazy PLL, na podstawie impulsów odczytanych z g³owicy odczyt o nazwie READ DATA.
Metoda RRL
Redukuje o 35% ilooci przemagnasowañ noonika - mo¿na zatem, przy niezmienionej maksymalnej czêstotliwooci pracy, pó³torakrotnie zwiêkszyæ gêstooæ zapisu danych.
Odczyt informacji polega na przemieszczeniu namagnesowanych odcinków noonika pod szczelin¹. Pole magnetyczne pochodz¹ce od namagnesowanego odcinka noonika, przenika rdzeñ g³owicy i indukuje w cewce si³ê elektromotoryczn¹, która jest nastêpnie wzmacniana i formowana w impuls cyfrowy, taktowany jako impuls zerowy lub jako bit danych, w zale¿nooci od metody zapisu informacji.
Sterownik dysków elastycznych
Sterownik dysków elastycznych zapewnia wspó³prace napêdu dysków z systemem. Wykonany jest z regu³y w formie karty, ³¹czonej z p³yt¹ g³ówn¹ za pomoc¹ z³¹cza PC Sloyt, z napêdem zao poprzez Driver Intrerface. Karta FDC zawiera przewa¿nie specjalizowany uk³ad scalony, realizuj¹cy wszystkie funkcji kontrolne i steruj¹ce napêdem dysków elastycznych, wiele firm owiatowych produkuje obecnie scalone kontrolery FDC. Jednym z takich kontrolerów jest kontroler blokowy karty FDC z uk³adem UM 8388 UNITED MICROELEKTRONICS. Jest to uk³ad scalony, programowo kompatybilny z uk³adem8272A. Uk³ad UM8388 mo¿e wspó³pracowaæ dwoma napêdami dysków (360 Kb i 1,2 MB - dyski 5,25 cala oraz 720 KB i 1,444 MB -,35 cala)
Uk³ad scalonego kontrolera UM8388 zawiera nastêpuj¹ce elementy i uk³ady
Nadajniki i odbiorniki interfejsu Detektor adresów s³u¿y do lokalizacji rejestrów wewnêtrznych sterownika FDC w przestrzeni adresowej I/O, w której zarezerwowano dwa obszary (3F0...3F7 lub 370.. 377) przeznaczone dla sterowników dysków elastycznych. W niektórych kartach FDC mo¿na za pomoc¹ zworek wybraæ jeden z dwóch obszarów. Zadaniem separatora danych, jest wydzielenie impulsów zwanych "oknem danych odczytanych" z przebiegu Read Data, uzyskanego w trakcie odczytu danych z dysku. Separator dzia³a w uk³adzie pêtli synchronicznej fazy. Zadaniem pêtli PLL jest zrównanie czêstotliwooci generatora przestrajanego napiêciem z czêstotliwooci generatora wzorcowego i to tak dok³adnie, by nie zmienia³o siê przesuniecie fazowe obu przebiegów. Uk³ad prekompresacji stosuje siê w celu opóYnienia zapisu bitu o ró¿ne odcinki czasu, w zale¿nooci od kombinacji zapisywanych aktualnie bitów. Uk³adem tym steruj¹ wyjocia Preshift 0 i Preshift 1 (PS0, PS1).
Monta¿ stacji w komputerze
 Instalacja
stacji dyskietek w obudowie
Instalacja
stacji dyskietek w obudowie
Stacjê dyskietek mo¿emy zainstalowaæ w dwóch miejscach w koszyku obudowy: bezpoorednio w miejscu dla niej przeznaczonym 3,5 cala lub w kieszeni 5,25 cala, lecz wtedy bêdzie potrzebna specjalna ramka. Napêd dyskietek przykrêciæ czteroma wkrêtami z drobnym gwintem stosuj¹c umiarkowan¹ si³ê.
Pod³¹cz zasilanie do stacji dyskietek
 Z
ty³u stacji dyskietek znajduje siê ma³e, 40-gniazdo zasilania. Pod³¹czyæ do
niego jedno z odczepów zasilania z ma³¹ wtyczk¹. Wtyczkê mo¿na pod³¹czyæ tylko
w jednym po³o¿eniu i nale¿y to zrobiæ delikatnie, lecz zdecydowanie do momentu
a¿ zaskoczy "z¹bek" wtyczki.
Z
ty³u stacji dyskietek znajduje siê ma³e, 40-gniazdo zasilania. Pod³¹czyæ do
niego jedno z odczepów zasilania z ma³¹ wtyczk¹. Wtyczkê mo¿na pod³¹czyæ tylko
w jednym po³o¿eniu i nale¿y to zrobiæ delikatnie, lecz zdecydowanie do momentu
a¿ zaskoczy "z¹bek" wtyczki.
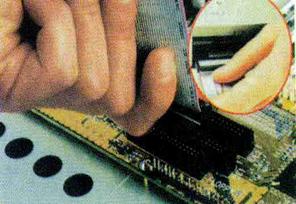 Pod³¹cz stacje do kontrolera
Pod³¹cz stacje do kontrolera
Wraz z p³yt¹ dostarczany jest kabel danych (taoma) z 34 przewodami. Jeden jej koniec pod³¹cz do gniazda 34-szpilkowego na p³ycie g³ównej oznaczonego jako FLOPPY lub FDD. Pamiêtaæ nale¿y ¿e jeden z przewodów taomy oznaczony jest na czerwono i powinien byæ pod³¹czony do szpilki numer 1. Drugi koniec taomy pod³¹czamy do stacji dyskietek. Tutaj szpilka numer 1 to szpilka bli¿ej gniazda zasilania. Jeoli pod³¹czy taomê odwrotnie nic siê nie zepsuje, stacja nie bêdzie reagowa³a na nasze komendy, dioda na stacji bêdzie owieci³a ci¹gle. Nale¿ wtedy odwróciæ wtyczkê.
Dysk sztywny, dysk twardy (ang. hard disk, hard disk drive) lub ¿argonowo "twardziel" to hermetycznie zamkniêty, sk³adaj¹cy siê z od 2 do 8 wiruj¹cych talerzy pokrytych bardzo cienk¹ warstw¹ magnetyczn¹. talerzy, ka¿dy posiada osobn¹ g³owicê odczytuj¹c¹-zapisuj¹c¹, która unosi siê nad nim na cienkiej poduszce powietrznej. Dysk twardy jest zwykle na sta³e w³¹czony do komputera i przechowuje dane, które powinny byæ zawsze dostêpne, takie jak system operacyjny. Nowoczesne dyski twarde posiadaj¹ bardzo du¿¹ przepustowooæ danych, niski czas dostêpu do danych, obracaj¹ siê z prêdkooci¹ kilku tysiêcy obrotów na minutê, a ich pojemnooæ wynosi kilkanaocie gigabajtów.
 Dysk twardy znajduje siê we
wnêtrzu obudowy komputera lub w ³atwo dostêpnej szufladzie, tzw. kieszeni i
s³u¿y do przechowywania
programów i danych. Dysk twardy zosta³ tak nazwany, z
powodu swej sztywnej konstrukcji, s¹ one umieszczone w odpowiednio
skonstruowanym py³oszczelnym zespole napêdowym, zwieraj¹cym ponadto uk³ady
sterowania silnikiem napêdu dysków, silnikiem przesuwu g³owic (pozycjonerem),
uk³adu sterownia zapisu, uk³adu odczytu oraz inne uk³ady steruj¹ce i kontrolne
zespo³u napêdowego.
Dysk twardy znajduje siê we
wnêtrzu obudowy komputera lub w ³atwo dostêpnej szufladzie, tzw. kieszeni i
s³u¿y do przechowywania
programów i danych. Dysk twardy zosta³ tak nazwany, z
powodu swej sztywnej konstrukcji, s¹ one umieszczone w odpowiednio
skonstruowanym py³oszczelnym zespole napêdowym, zwieraj¹cym ponadto uk³ady
sterowania silnikiem napêdu dysków, silnikiem przesuwu g³owic (pozycjonerem),
uk³adu sterownia zapisu, uk³adu odczytu oraz inne uk³ady steruj¹ce i kontrolne
zespo³u napêdowego.
Wiêkszooæ dysków twardych sk³ada siê nastêpuj¹cych komponentów: obudowy,
pozycjonera g³owicy, ram g³owic, g³owic zapisu i odczytu, wiruj¹cych talerzy,
uk³adów sterowania.
Praca z twardym dyskiem jest mo¿liwa dopiero
wtedy, gdy zostanie on sformatowany przez producenta lub u¿ytkownika.
Formatowanie polega na podziale dysku na ocie¿ki i sektory, jest to tzw.
Formatowanie niskiego poziomu lub formatowanie fizyczne.
|
Dysk twardy odró¿nia siê od dysku elastycznego nastêpuj¹cymi cechami |
||
|
|
G³owica odczytu zapisu, nie dotyka dysku w czasie pracy, jest bowiem utrzymywana automatycznie w czasie ruchu obrotowego |
|
|
|
Prêdkooæ dysku twardego jest bardzo du¿a, dziêki czemu osi¹ga siê du¿e prêdkooci transmisji danych(MB/s) |
|
|
|
Poniewa¿ dysk twardy jest nie wymiennym noœnikiem danych, mo¿na go dok³adnie wycentrowaæ i osi¹gn¹æ du¿¹ liczbê ocie¿ek, czyli du¿¹ pojemnoœæ (do kilku GB) |
|
|
Najwa¿niejsze parametry techniczne dysków twardych |
||
|
Pojemnooæ od 10MB do kilku GB |
||
|
Liczba g³owic zapisu i odczytu (od 4 do kilkunastu) |
||
|
Liczba cylindrów (od 615 do kilku tysiêcy) |
||
|
Oredni czas dostêpu |
||
|
Prêdkooæ obrotowa dysku (kilka tysiêcy obrotów na minutê) |
||
|
Prêdkooæ transmisji danych |
||
|
Zasilanie |
||
Sterownik dysków twardych
Napêd dysków twardych
³¹czy siê ze systemem mikroprocesorowym (p³yt¹ g³ówn¹) poprzez sterownik dysku
twardego za pomoc¹ interfejsów HDD.
Do najczêœciej spotykanych interfejsów nale¿¹:
 Interfejs IDE Standard ST-506 narzuca³ pewne ograniczenia co
sk³oni³o do opracowania nowego interfejsu zwanego IDE-AT (Bus Hard Disk
Inreface). W przypadku tego interfejsu producenci dysków
twardych zintegrowali w tym urz¹dzeniu wszystkie uk³ady zwi¹zane ze sterowaniem
transmisj¹ danych. Interfejs posiada 16-bitowa szynê do transmisji informacji,
nie mo¿e wiêc byæ stosowany w komputerach XT!. Dla sterowników IDE
zarezerwowano tylko dwa obszary (1F0...1F7 i 170...177) w przestrzeni adresowej
I/O, dziêki temu system mikroprocesorowy mo¿e wspó³pracowaæ z dwoma dyskami
twardymi.
Interfejs IDE Standard ST-506 narzuca³ pewne ograniczenia co
sk³oni³o do opracowania nowego interfejsu zwanego IDE-AT (Bus Hard Disk
Inreface). W przypadku tego interfejsu producenci dysków
twardych zintegrowali w tym urz¹dzeniu wszystkie uk³ady zwi¹zane ze sterowaniem
transmisj¹ danych. Interfejs posiada 16-bitowa szynê do transmisji informacji,
nie mo¿e wiêc byæ stosowany w komputerach XT!. Dla sterowników IDE
zarezerwowano tylko dwa obszary (1F0...1F7 i 170...177) w przestrzeni adresowej
I/O, dziêki temu system mikroprocesorowy mo¿e wspó³pracowaæ z dwoma dyskami
twardymi.
Niektóre sterowniki IDE wyposa¿ane s¹ w
pamiêci Cache, pozwalaj¹ce zwiêkszyæ szybkooæ transmisji danych, mog¹ osi¹gaæ
pojemnooci kilku MB. Kontroler te umo¿liwia pod³¹czenie dwóch dysków na jednym
kablu jako Master i Slave o pojemnooci nie wiêkszej ni¿ od 40 do 528 MB.
Sposób takiego po³¹czenia przestawiono na rysunku.
Interfejs EIDE (ang. Enhanced IDE) funkcjonuje od 1994 roku ró¿ni siê
on od swego poprzednika zwiêkszon¹ szybkooci¹ przesy³ania danych, pokonuje
granice 528 MB, obs³uguje cztery dyski twarde, mo¿e obs³ugiwaæ równie¿ inne
urz¹dzenia np.: CD.-ROM, streamery.
Standard EIDE mo¿e obs³u¿yæ cztery dyski twarde za pomoc¹ dwóch adapterów
(dwóch kana³ów IDE) o adresach IFO-1F7H i poziomie przerwania IRQ14 oraz
adresach 170-177H i IRQ15. Adaptery mog¹ znajdowaæ siê na wspólnej karcie lub
na kartach oddzielnych. Do ka¿dego kana³u mo¿na do³¹czyæ dwa urz¹dzenia IDE,
które pracuj¹ w zwyczajnym systemie jako Master i Slave.
Cztery dyski twarde pracuj¹ce w systemie zachowuj¹ nastêpuj¹c¹ kolejnooæ:
1.Dysk Master - Pierwotny adapter, 2. Dysk Slave - Pierwotny adapter,
3.Dysk Master - Wtórny adapter , 4.
Dysk Slave - Wtórny adapter
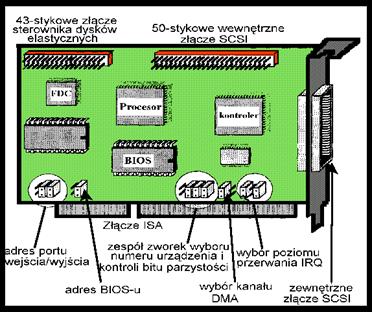
Dla pokonania granicy 528 MB standard EIDE wykorzystuje tzw.
Metodê LBA (Logical Block Address), która powoduje
przenumerowanie wszystkich sektorów, tzn. dokonuje tzw. Transakcji adresów,
zamieniaj¹c rzeczywisty numer g³owicy, cylindra i sektora na logiczny
odpowiednik; odpada wiêc skomplikowana adresacja za pomoc¹ cylindrów, g³owic i
sektorów. Metoda ta funkcjonuje w ka¿dym systemie operacyjnym oprócz DOS-a.
Alternatyw¹ do metody LBA jest metoda Extended CHS (XCHS), która zezwala na
zwiêkszenie liczby g³owic do 255.
Z tego wynika ¿e BIOS mo¿e obs³u¿y dyski posiadaj¹ce 64 sektory, 255 g³owic i
1024 cylindry, czyli o maksymalnej pojemnooci do 7,8 GB. Oczywiœcie w
praktyce zak³ada siê ¿e liczba g³owic nie mo¿e by wiêksza ni¿ 16. Jeœli
wiec BIOS natrafi na parametr okreolaj¹cy liczbê g³owic wiêksza ni¿ 16, wtedy
przelicz wartooci CHS w ten sposób, ¿e dyskowi nie przydziela wiêcej ni¿ 16
g³owic, zwiêksza natomiast liczbê cylindrów lub sektorów.
Interfejs SCSI
SCSI (Small Computr System Intrerface)
wykorzystywany do sterowania napêdów dysków twardych, stanowi raczej
standard szyny ni¿ standard interfejsu dysków twardych.
Jeœli w komputerze PC zostanie zainstalowany sterownik SCSI ( a raczej
adapter SCSI), to otrzymamy now¹ magistralê do której bêdzie mo¿na pod³¹czyæ
kilka urz¹dzeñ.
Poprzez SCSI mo¿na po³¹czyæ ze sob¹ osiem inteligentnych jednostek w tzw.
Konfiguracji ³añcuchowej.
W konfiguracji ³añcuchowej wszystkie linie interfejsu s¹ wspólne dla wszystkich
urz¹dzeñ, a kabel ³¹czy urz¹dzenie pierwsze z drugim, drugie z trzecim, trzecie
z drugim, itp.
SCSI umo¿liwia ka¿dej jednostce rozpocz¹æ transmisjê danych, jednak w praktyce najczêœciej inicjatorem jest komputer (a dok³adniej - sterownik SCSI),z³¹cze adresatem urz¹dzenie zewnêtrzne.
Praca magistrali SCSI przebiega w kilku podstawowych fazach
Interfejs SCSI posiada 8-bitow¹ szynê danych DB0-7 oraz
liniê bitu parzystoœci DBP, za pomoc¹ których nastêpuje transmisja
danych pomiêdzy sterownikiem a do³¹czonymi urz¹dzeniami, sygna³y na wszystkich
liniach interfejsu generowane s¹ w logice ujemnej, tzn. aktywnym sygna³em na
linii jest "zero" logiczne.
Karty sterowników SCSI posiadaj¹ w³asny BIOS; oznacza to, ¿e sterowniki nie
korzystaj¹ z procedur obs³ugi dysku, zawartych w BIOS-ie p³yty g³ównej, dziêki
temu parametry dysków SCSI nie s¹ ograniczone przez ten BIOS. Stosuj¹c SCSI,
mo¿na tworzyæ uk³ady zbli¿one do siec lokalnej, pozwalaj¹ce na wspólne
korzystanie z dro¿szych urz¹dzeñ peryferyjnych.
Sposoby zapisu i odczytu danych na dysku twardym
Wszystkie typy pamiêci
na warstwach magnetycznych dzia³aj¹ na tej samej zasadzie; na poruszaj¹cej siê
warstwie magnetycznej dokonywany jest zapis informacji polegaj¹cy na
odpowiednim przemagnesowaniu pól noonika informacji.
Zapis i odczyt dokonywany jest za pomoc¹ g³owic. G³owica nazywamy rdzeñ z nawiniêt¹ na ni¹
cewka i niewielk¹ szczelin¹ miedzy biegunami. Zapis informacji sprowadza siê do
namagnesowania poruszaj¹cego siê noonika. Pole magnetyczne wytworzone w
szczelinie magnesuje noonik tak d³ugo, jak d³ugo p³ynie pr¹d w cewce g³owicy.
Namagnesowany odcinek noonika zachowuje siê jak zwyk³y magnes, wytwarzaj¹c
w³asne pole magnetyczne..
Istnieje wiele metod zapisu informacji cyfrowej na nooniku magnetycznym
Polega na tym, ¿e zmiana kierunku pr¹du w g³owicy zapisu nastêpuje w chwili zmiany wartooci kolejnych bitów informacji. Zmiana kierunku pr¹du nie wystêpuje podczas zapisywania ci¹gu zer lub jedynek. Metoda ta nie posiada mo¿liwooci samo synchronizacji, tzn z informacji odczytanej nie da siê wydzieliæ impulsów okreolaj¹cych po³o¿enie komórki bitowej
Polega na tym, ¿e przy modulacji FM pr¹d w g³owicy zapisu zmienia na pocz¹tku ka¿dej komórki bitowej, oraz w orodku komórki, gdy zapisywany bit ma wartooæ "jedynki"
Metoda MFM nazywana jest metod¹ z podwójn¹ gêstooci¹ i
dziêki niej jest podwojona jest pojemnooæ dysku twardego, stosuje siê tu
regu³ê: bit o wartooci "1" ustawia impuls zapisuj¹cy poorodku komórki
bitowej, bit o wartooci "0", ustawia impuls na pocz¹tku komórki
bitowej lecz tylko wtedy, gdy poprzedni bit nie jest równy "1".
W metodzie tej dla odtwarzania danych, w trakcie odczytu, stosowany jest uk³ad
z pêtl¹ synchronizacji fazy PLL, na podstawie impulsów odczytanych z g³owicy
odczyt o nazwie READ DATA.
Redukuje o 35%
iloœci przemagnasowañ
noonika - mo¿na zatem, przy niezmienionej maksymalnej czêstotliwooci pracy,
pó³torakrotnie zwiêkszyæ gêstooæ zapisu danych Odczyt informacji polega na
przemieszczeniu namagnesowanych odcinków noonika pod szczelin¹.
Pole magnetyczne pochodz¹ce od namagnesowanego odcinka noonika, przenika rdzeñ
g³owicy i indukuje w cewce si³ê elektromotoryczn¹, która jest nastêpnie wzmacniana i
formowana w impuls cyfrowy, taktowany jako impuls zerowy lub jako bit danych, w
zale¿nooci od metody zapisu informacji
Instalacja dysku w komputerze
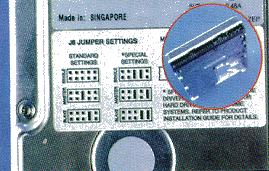 Ustaw kolejnooæ dysku w systemie Przed zainstalowaniem dysku twardego do obudowy, nale¿y
sprawdziæ najpierw sprawdziæ jego ustawienia. Dysk konfigurujemy za pomoc¹
zworek znajduj¹cych siê najczêociej obok gniazda danych lub na spodzie dysku.
Jeœli jest to nowy dysk to bêdzie on ustawiony jako Master lub Single.
Je¿eli tak nie jest nale¿y skonfigurowaæ ustawienia . sposób konfiguracji
zworek powinien znajdowaæ siê w instrukcji obs³ugi lub na nalepce na dysku
twardym
Ustaw kolejnooæ dysku w systemie Przed zainstalowaniem dysku twardego do obudowy, nale¿y
sprawdziæ najpierw sprawdziæ jego ustawienia. Dysk konfigurujemy za pomoc¹
zworek znajduj¹cych siê najczêociej obok gniazda danych lub na spodzie dysku.
Jeœli jest to nowy dysk to bêdzie on ustawiony jako Master lub Single.
Je¿eli tak nie jest nale¿y skonfigurowaæ ustawienia . sposób konfiguracji
zworek powinien znajdowaæ siê w instrukcji obs³ugi lub na nalepce na dysku
twardym
 Mocowanie dysku w obudowie Twardy dysk instalujemy w koszyku obudowy, pod stacj¹
dyskietek, w szynach 3,5 cala. Mo¿na go te¿ instalowaæ w powszechnie dostêpnych
szufladach przenoonych 5,25 cala. Twardy dysk przykrêca siê czterema wkrêtami z
grubym i mo¿liwie krótkim gwintem. Trzeba pamiêtaæ ¿eby zamontowaæ dysk
elektronik¹ do do³u i w pozycji le¿¹cej zapobiega to przypadkowemu dotkniêciu
g³owiæ powierzchni dysku
Mocowanie dysku w obudowie Twardy dysk instalujemy w koszyku obudowy, pod stacj¹
dyskietek, w szynach 3,5 cala. Mo¿na go te¿ instalowaæ w powszechnie dostêpnych
szufladach przenoonych 5,25 cala. Twardy dysk przykrêca siê czterema wkrêtami z
grubym i mo¿liwie krótkim gwintem. Trzeba pamiêtaæ ¿eby zamontowaæ dysk
elektronik¹ do do³u i w pozycji le¿¹cej zapobiega to przypadkowemu dotkniêciu
g³owiæ powierzchni dysku
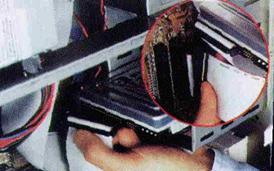 Pod³¹cz dysk do kontrolera Do pod³¹czenia dysku twardego u¿ywa siê taomy
40-przewodowej. Jeden jej koniec nale¿y umieociæ w 40-szpilkowym gnieYdzie na
p³ycie g³ównej z oznaczeniem IDE 0 lub HDD 1,natomiast w gnieYdzie
40-szpilkowym dysku twardego.
Pod³¹cz dysk do kontrolera Do pod³¹czenia dysku twardego u¿ywa siê taomy
40-przewodowej. Jeden jej koniec nale¿y umieociæ w 40-szpilkowym gnieYdzie na
p³ycie g³ównej z oznaczeniem IDE 0 lub HDD 1,natomiast w gnieYdzie
40-szpilkowym dysku twardego.
Nale¿y pamiêtaæ o zasadzie szpilki 1 (przewód oznaczony kolorem czerwonym), a
PIN1 w twardym dysku znajduje siê od strony zasilania.
Z³e pod³¹czenie taomy nie spowoduje ¿adnych uszkodzeñ., wystarczy wtedy obróciæ
taomê.
 Pod³¹cz zasilanie Jeden z cztero kablowych odczepów zasilania z du¿¹
wtyczk¹ pod³¹czyæ do odpowiedniego gniazda twardego dysku.
Pod³¹cz zasilanie Jeden z cztero kablowych odczepów zasilania z du¿¹
wtyczk¹ pod³¹czyæ do odpowiedniego gniazda twardego dysku.
Zrobiæ to nale¿y silnie lecz ostro¿nie. Specjalne wyprofilowane gniazdo i wtyka
pozwala prawid³owo pod³¹czyæ zasilanie bez pomy³ki
|
