ALTE DOCUMENTE
|
||||||||||
LUCRUL MECANIC
Noþiunea de lucru mecanic a apãrut din necesitatea de a mãsura munca (fizicã) depusã de om, precum ºi de maºinile construite de el pentru a-1 ajuta în aceastã muncã.
Sã
considerãm situaþia simplã în care un buºtean este deplasat pe un plan
orizontal cu ajutorul unui cablu de cãtre un om. Aceeaºi deplasare se poate
realiza ºi cu ajutorul unui cal sau al unui tractor. Generalizând pânã la
abstractizare interacþiunea care se realizeazã prin intermediul cablului între buºtean
pe de o parte ºi om, cal sau tractor pe de altã parte, s-a ajuns la noþiunea de
forþã. Aceastã noþiune ne permite sã facem abstracþie de situaþia concretã
consideratã ºi în loc sã spunem cã omul munceºte, vom spune cã forþa ![]() produce un
lucru mecanic. Lucrul mecanic al forþei
produce un
lucru mecanic. Lucrul mecanic al forþei ![]() este cu atât mai mare
cu cât inte 414e419e nsitatea forþei ºi deplasarea corpului (asupra cãruia acþioneazã forþa)
sunt mai mari. Pentru generalizare, se poate face abstracþie ºi de corpul
considerat ºi sã spunem cã o forþã produce lucru mecanic atunci când punctul sãu
de aplicaþie se deplaseazã. ªtim cã o forþã care acþioneazã asupra unui rigid
are caracterul unui vector alunecãtor, adicã efectul forþei nu se schimbã dacã
punctul de aplicaþie se deplaseazã pe suportul ei. Trebuie sã observãm cã în
cadrul noþiunii de lucru mecanic al unei forþe nu o astfel de deplasare este
luatã în considerare, ci deplasarea efectivã a punctului de pe corp în care se
considerã aplicatã forþa.
este cu atât mai mare
cu cât inte 414e419e nsitatea forþei ºi deplasarea corpului (asupra cãruia acþioneazã forþa)
sunt mai mari. Pentru generalizare, se poate face abstracþie ºi de corpul
considerat ºi sã spunem cã o forþã produce lucru mecanic atunci când punctul sãu
de aplicaþie se deplaseazã. ªtim cã o forþã care acþioneazã asupra unui rigid
are caracterul unui vector alunecãtor, adicã efectul forþei nu se schimbã dacã
punctul de aplicaþie se deplaseazã pe suportul ei. Trebuie sã observãm cã în
cadrul noþiunii de lucru mecanic al unei forþe nu o astfel de deplasare este
luatã în considerare, ci deplasarea efectivã a punctului de pe corp în care se
considerã aplicatã forþa.
Denumirea de lucru mecanic a fost datã de inginerul francez Gustave Gaspard Coriolis. Conþinutul noþiunii s-a adâncit, o datã cu cea de cãldurã, în secolul al XlX-lea când s-a dovedit experimental cã existã un raport constant între cantitatea de lucru mecanic (care este legat de miºcarea mecanicã) ºi cantitatea de cãldurã (care este legatã de o formã de miºcare nemecanicã a materiei) în care acesta se poate transforma.
1. Definiþie
Se
considerã un punct material M care se deplaseazã pe traiectoria
curbilinie ( Γ ), fiind
acþionat de forþa variabilã ![]() .
La momentul t punctul material se aflã în M
.
La momentul t punctul material se aflã în M![]() având faþã de un punct de referinþã fix 0 vectorul
de poziþie r, iar la
momentul
având faþã de un punct de referinþã fix 0 vectorul
de poziþie r, iar la
momentul ![]()
![]() se aflã în
se aflã în![]() , având vectorul de poziþie
, având vectorul de poziþie![]() .
.
Prin
definiþie se va numi lucrul mecanic elementar, corespunzãtor forþei ![]() ºi deplasãrii elementare
ºi deplasãrii elementare ![]() , produsul scalar
, produsul scalar
![]() unde
unde ![]() . (1)
. (1)
Cum ![]() , expresia (1) devine
, expresia (1) devine ![]() (2)
(2)
Rezultã
cã: lucrul mecanic elementar corespunzãtor
unei forþe ![]() ºi unei deplasãri elementare
ºi unei deplasãri elementare
![]() a punctului de aplicaþie
al forþei este egal cu produsul scalar dintre forþã ºi deplasarea elementarã.
a punctului de aplicaþie
al forþei este egal cu produsul scalar dintre forþã ºi deplasarea elementarã.
În
expresia (1) s-a aproximat cã în intervalul de timp ![]() forþa
forþa ![]() rãmâne constantã, iar arcul este egal cu coarda corespunzãtoare.
Folosind exprimarea analiticã a
vectorilor
rãmâne constantã, iar arcul este egal cu coarda corespunzãtoare.
Folosind exprimarea analiticã a
vectorilor ![]() ºi
ºi ![]() în funcþie de
proiecþiile vectorilor pe axele unui sistem cartezian Oxyz (figura 1)
în funcþie de
proiecþiile vectorilor pe axele unui sistem cartezian Oxyz (figura 1) ![]() ;
;![]() , (3) expresia (1) devine:
, (3) expresia (1) devine: ![]() (4)
(4)
Figura 1
În
funcþie de viteza ![]() , expresia lucrului mecanic elementar este
, expresia lucrului mecanic elementar este ![]() .
.
2. Proprietãþi ale lucrului mecanic:
a) este o mãrime scalarã având ca unitate de mãsurã în sistemul internaþional SI joule-ul (J) ºi în sistemul tehnic kilogram - forþã - metrul (kgf.m);
![]() b) este pozitiv când
b) este pozitiv când ![]() ºi poartã în
acest caz numele de lucru mecanic motor;
ºi poartã în
acest caz numele de lucru mecanic motor;
![]() c) este negativ când
c) este negativ când ![]() ºi se numeºte în acest
caz lucru mecanic rezistent ;
ºi se numeºte în acest
caz lucru mecanic rezistent ;
d) este nul când ![]() ;
;
e)
dacã deplasarea ![]() este compusã din n deplasãri elementare
este compusã din n deplasãri elementare ![]() atunci
atunci ![]() (6)
(6)
Deci: lucrul mecanic elementar corespunzãtor unei deplasãri compuse este egal cu suma lucrurilor mecanice elementare aferente deplasãrilor componente;
f) dacã
forþa ![]() reprezintã rezultanta
unicã a unui sistem de forþe
reprezintã rezultanta
unicã a unui sistem de forþe ![]() (7) ,
atunci lucrul mecanic este
(7) ,
atunci lucrul mecanic este ![]() (8).
(8).
Adicã, lucrul mecanic elementar corespunzãtor rezultantei unui sistem de forþe este egal cu suma algebricã a lucrurilor mecanice elementare ale forþelor componente.
 Figura 2
Figura 2
3. Lucrul mecanic total
Când
este corespunzãtor unei forþe variabile ![]() ºi unei deplasãri finite a punctului
material între punctele A ºi B pe o traiectorie curbilinie
(figura 2) lucrul mecanic este dat de expresia:
ºi unei deplasãri finite a punctului
material între punctele A ºi B pe o traiectorie curbilinie
(figura 2) lucrul mecanic este dat de expresia: ![]() (9) ,
(9) ,
iar în cazul unui cuplu
![]() (10).
(10).
Expresia
(9) se obþine prin descompunerea miºcãrii finite în miºcãrii elementare pentru
care forþa ![]() se considerã constantã., iar arcul de curbã se
aproximeazã cu coarda ºi însumarea lucrurilor mecanice elementare
corespunzãtoare.
se considerã constantã., iar arcul de curbã se
aproximeazã cu coarda ºi însumarea lucrurilor mecanice elementare
corespunzãtoare.
Din relaþia (9) se observã cã lucrul mecanic corespunzãtor unei deplasãri finite a unui punct material ºi unei forþe variabile depind atât de modul cum variazã forþa, cât ºi de forma traiectoriei.
4. Lucrul mecanic în cazul forþelor conservative
În cazul în care forþa![]() este conservativã expresia ei este
este conservativã expresia ei este![]() (11), unde U(x, y,
z) este funcþia de forþã.
(11), unde U(x, y,
z) este funcþia de forþã.
Funcþia de forþã este o funcþie scalarã de coordonatele punctului, cu ajutorul cãreia se pot determina componentele forþei astfel:
Pentru a exista o funcþie de forþã trebuie îndeplinite condiþiile lui Cauchy, care sunt :
![]()
![]()
![]()
Lucrul mecanic elementar este: ![]() (12)
(12)
![]() (13)
(13)
Lucrul mecanic total este ![]() (14),
(14),
unde ![]() ºi
ºi ![]() sunt
funcþiile de forþã corespunzãtoare poziþiilor iniþialã ºi finalã.
sunt
funcþiile de forþã corespunzãtoare poziþiilor iniþialã ºi finalã.
Rezultã cã: lucrul mecanic total în cazul unei forþe conservative depinde numai de poziþiile iniþialã ºi finalã ale punctului, fiind independent de forma traiectoriei.
În locul funcþiei U, se
poate considera funcþia V, numitã ºi funcþie potenþialã ºi
definitã prin relaþia: ![]() . În acest caz, lucrul mecanic elementar are expresia
. În acest caz, lucrul mecanic elementar are expresia ![]() .
.
Funcþia de forþã U ºi funcþia potenþialã V nu pot fi determinate decât cu aproximaþia unei constante.
Dacã un punct material este acþionat
simultan de un sistem de forþe conservative ![]() care derivã din
funcþiile de forþã
care derivã din
funcþiile de forþã ![]() , astfel încât:
, astfel încât:
![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
;
.....; .....; ......;
![]() ;
; ![]() ;
; ![]() ;
;
rezultanta
![]() va avea proiecþiile:
va avea proiecþiile:
![]() ;
;
![]() ;
;
![]() ;
;
adicã
rezultanta ![]() derivã din funcþia de
forþã
derivã din funcþia de
forþã ![]() . Un astfel de sistem de forþe se numeºte sistem conservativ.
. Un astfel de sistem de forþe se numeºte sistem conservativ.
Figura 3
Exemple a) Forþa ![]() este constantã
ca modul ºi direcþie iar traiectoria este o curbã oarecare (figura 3). Faþã de
sistemul de axe ales, se poate scrie
este constantã
ca modul ºi direcþie iar traiectoria este o curbã oarecare (figura 3). Faþã de
sistemul de axe ales, se poate scrie
![]() ;
; ![]() (15), deci:
(15), deci:![]() (16)
(16)
Rezultã ![]() (17), unde
(17), unde ![]() este unghiul dintre segmentul de
dreaptã AB ºi axa Ox.
este unghiul dintre segmentul de
dreaptã AB ºi axa Ox.
Semnul plus se ia când punctul coboarã, iar semnul minus când punctul urcã.
Figura 4
b) În cazul în care ![]() este o forþã
gravitaþionalã (figura 4) notând-o cu G, rezultã:
este o forþã
gravitaþionalã (figura 4) notând-o cu G, rezultã:
![]() ,
, ![]() (18)
(18) ![]() ,
, ![]() .
.
În
general ![]() (19).
(19).
Rezultã cã: lucrul mecanic al unei greutãþi nu depinde de forma traiectoriei pe care se deplaseazã punctul sãu de aplicaþie, ci depinde. numai de poziþiile extreme între care se efectueazã miºcarea, fiind egal cu produsul dintre valoarea numericã a forþei ºi diferenþa de cotã dintre poziþiile iniþialã ºi finalã.
 c) Lucrul mecanic al unei
forþe elastice. Se considerã un resort spiral OM în stare liberã
fixat în punctul 0 (figura 5). Prin întinderea arcului cu lungimea x ia
naºtere o forþã
c) Lucrul mecanic al unei
forþe elastice. Se considerã un resort spiral OM în stare liberã
fixat în punctul 0 (figura 5). Prin întinderea arcului cu lungimea x ia
naºtere o forþã ![]() = kx, proporþionalã cu alungirea resortului.
Coeficientul de proporþionalitate notat prin k poartã numele de constantã
elasticã a resortului ºi reprezintã forþa necesarã pentru a produce o alungire
a resortului egalã cu unitatea. Pentru o deplasare elementarã
= kx, proporþionalã cu alungirea resortului.
Coeficientul de proporþionalitate notat prin k poartã numele de constantã
elasticã a resortului ºi reprezintã forþa necesarã pentru a produce o alungire
a resortului egalã cu unitatea. Pentru o deplasare elementarã ![]() a
punctului M din M' în M", lucrul mecanic elementar corespunzãtor
forþei elastice
a
punctului M din M' în M", lucrul mecanic elementar corespunzãtor
forþei elastice![]() ºi deplasãrii dx este :
ºi deplasãrii dx este :
![]() (20).
(20).
Pentru o deplasare finitã din A în B a extremitãþii M a resortului când acesta este întins, lucrul mecanic va fi
![]() (21)
(21)
Figura 5
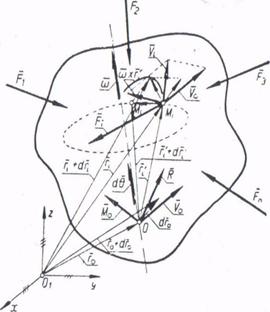
5. Lucrul mecanic elementar corespunzãtor unui sistem de forþe ce acþioneazã asupra unui solid rigid
Se considerã un solid rigid liber (figura 6), supus acþiunii unui
sistem de forþe active ![]() .
.
Lucrul mecanic elementar corespunzãtor forþei ![]() ºi deplasãrii elementare
ºi deplasãrii elementare
![]() , a punctului de aplicaþie
, a punctului de aplicaþie ![]() , al forþei este :
, al forþei este :
![]() (22)
(22)
Notând cu:
![]() - viteza punctului O, aparþinând solidului rigid ;
- viteza punctului O, aparþinând solidului rigid ;
![]() - viteza unghiularã de rotaþie relativã a solidului rigid
faþã de punctul 0, relaþia (22) devine :
- viteza unghiularã de rotaþie relativã a solidului rigid
faþã de punctul 0, relaþia (22) devine :
![]() ,
,
unde
![]() este vectorul de
poziþie al punctului
este vectorul de
poziþie al punctului ![]() faþã de punctul 0. Pentru
întregul sistem de forþe se obþine
faþã de punctul 0. Pentru
întregul sistem de forþe se obþine ![]()
Figura 6
 Dar
Dar
![]() - deplasarea elementarã prin translaþie a rigidului
- deplasarea elementarã prin translaþie a rigidului
2. ![]() - unghiul elementar
de rotaþie considerat ca vector;
- unghiul elementar
de rotaþie considerat ca vector;
3. ![]() - vectorul rezultant
al sistemului de forþe active;
- vectorul rezultant
al sistemului de forþe active;
4. ![]() - vectorul moment
rezultant al sistemului de forþe active relativ la polul 0;
- vectorul moment
rezultant al sistemului de forþe active relativ la polul 0;
Adicã
![]()
Un caz important în aplicaþiile tehnice
este acela al unui rigid acþionat de un cuplu ![]() .În acest caz miºcarea rigidului este o rotaþie. Având în vedere
cã
.În acest caz miºcarea rigidului este o rotaþie. Având în vedere
cã ![]() , din relaþia (23) se obþine :
, din relaþia (23) se obþine :
![]() ;
;  (24)
(24)
Când axa de rotaþie coincide cu
suportul lui ![]() ºi acesta este
constant, rezultã:
ºi acesta este
constant, rezultã:
![]() (25)
(25)
6. Lucrul mecanic al forþelor interioare
Se considerã douã puncte materiale ![]() ºi
ºi ![]() asupra cãrora acþioneazã
forþele interioare
asupra cãrora acþioneazã
forþele interioare ![]() ºi respectiv
ºi respectiv ![]() (figura 7). Fie
(figura 7). Fie ![]() ºi
ºi ![]() vectorii de poziþie ai punctelor
vectorii de poziþie ai punctelor ![]() ºi
ºi ![]() în raport cu punctul
fix 0.
în raport cu punctul
fix 0.
Lucrul mecanic elementar aferent
forþelor ![]() ºi
ºi ![]() ºi deplasãrilor
elementare ale punctelor de aplicaþie ale forþelor este
ºi deplasãrilor
elementare ale punctelor de aplicaþie ale forþelor este
![]() .
.
Deoarece  rezulta cã
rezulta cã![]() (26)
(26)
În expresia (26) λ este un
scalar pozitiv sau negativ dupã cum punctele ![]() ºi
ºi ![]() se resping sau se
atrag.
se resping sau se
atrag.
Dacã punctele materiale aparþin unui
sistem material rigid  , iar
, iar ![]() , rezultã cã: suma
lucrurilor mecanice elementare ale forþelor interioare ce acþioneazã punctele
unui sistem material rigid, pentru orice deplasare elementarã a sistemului
este nulã.
, rezultã cã: suma
lucrurilor mecanice elementare ale forþelor interioare ce acþioneazã punctele
unui sistem material rigid, pentru orice deplasare elementarã a sistemului
este nulã.
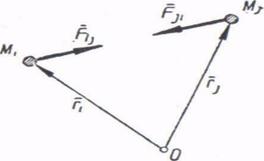
Figura 7
7. Reprezentarea graficã a lucrului mecanic
În figura 8 este arãtatã reprezentarea graficã a lucrului mecanic cu ajutorul unei diagrame. În abscisã se reprezintã proiecþia deplasãrii pe direcþia forþei, iar în ordonatã este reprezentatã forþa.
Lucrul mecanic corespunzãtor forþei ![]() ºi deplasãrii finite
ºi deplasãrii finite ![]() este egal cu valoarea
ariei datã de diagrama a
este egal cu valoarea
ariei datã de diagrama a
 suprafaþa
suprafaþa
![]() (27)
(27)
iar în cazul unui moment prin valoarea suprafeþei date de diagrama b.
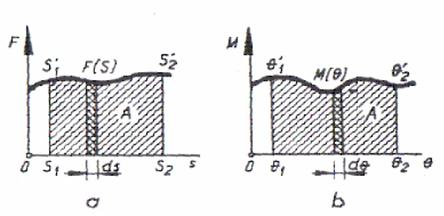
Figura 8
|
