Raport
de
Grant: Studiu teoretic si experimental al sistemului starter-alternator integrat la autovehicule de noua generatie
Autor: Moldovan Tiberiu
Universitatea: Universitatea Tenhica din Cluj-Napoca
Probleme generale privind sistemul starter-alternator integrat
cu masina sincrona cu magneti permanenti interiori
La autovehiculele actuale partea de forta a sistemului electric este formata din doua echipamente separate: starterul sau demarorul (motor electric) si alternatorul. Starter 21421f57v ul conventional, masina de c.c cu colector si magneti permanenti, actioneaza motorul cu ardere interna, printr-un angrenaj mecanic. Alternatorul conventional (de tip Lundell, cu poli în ghiara) actionat prin curea, furnizeaza energia electrica necesara în autovehicul. Acesta este limitat constructiv la 2 kW. Randamentul actualelor alternatoare este de 55-60 %, fiind preconizat ca acesta sa creasca la aproximativ 75 %, la sarcina nominala, pentru ansamblul masina electrica-convertor electronic de putere. [5]
În Fig. 1 a) este prezentata schematizat cuplarea conventionala cu 2 masini electrice separate: starterterul si alternatorul. Starter 21421f57v ul conventional actioneaza motorul de ardere interna, printr-un angrenaj mecanic, iar alternatorul conventional, actionat prin curea furnizeaza energia electrica necesara în autovehicul.
În Fig. 1 b) este prezentata o solutie de actionare directa ('direct-drive') în starterul si alternatorul sunt integrate într-o singura masina electrica, numita SAI, care este montata coaxial cu arborele de actionare a motorului cu ardere interna, mai exact, între acesta si transmisie ( ambreiaj, cutie de viteza). Utilizarea unui sistem starter-alternator integrat (SAI) asigura functionarea ansamblului la pornire (rol de starter), iar apoi masina electrica va lucra în regim de generator furnizând energie electrica (rol de alternator). [7]
Fig. 1 a) Sistem conventional de starter si alternator.
b) Sistem SAI cu actionare directa.
Aceasta configuratie, care are raportul de transmisie de 1:1, rezolva în mod elegant problema cuplajului mecanic, eliminând o serie de elemente mecanice (curea de transmisie, sau angrenaje mecanice) a caror functie este preluata de axul rotoric al masinii electrice al sistemului SAI.
Pentru a realiza un studiu al sistemului SAI, la nivel de stand experimental, este necesara studierea caietului de sarcini al acestui tip de aplicatii. Alegerea celei mai bune solutii de SAI se poate face doar dupa studierea cerintelor electrice, mecanice si termice ale aplicatiei. În continuare, sunt prezentate principalele cerinte electrice si constrângeri mecanice si termice care trebuie luate in calcul pentru alegerea solutiei optime de sistem SAI.
Cerintele electrice sunt în special legate de baterie (avem tensiunea impusa de 42V) si de performantele masinii electric în ambele regimuri de functionare.
Pentru regimul de motor:
- cuplu de pornire mare 150Nm (0 la 500 rpm),
- putere ceruta maxima 6KW (0 500 rpm),
- densitate maxima de curent limitata la 50A/mm2.
Pentru regimul de generator:
- posibilitatea functionarii intr-o gama mare de viteze (pâna la 6000rpm),
- densitate maxima de curent limitata la 20A/ mm2,
- randamentul electric al sistemului de 75%, la 1500rpm. [1]
În urmatorul tabel sunt prezentate comparativ principalele performante ale functiei de starter si alternator pentru sistemul conventional si pentru sistemul SAI cu actionare directa.
Problemele cum ar fi: volumul si forma masinii electrice a sistemului SAI, schimbarile bruste de viteza ale vehiculului (frânari bruste, acceleratii puternice, oprirea motorului), vibratiile sasiului (o problema mai ales pentru convertorul electric de putere aferent masinii electrice), precum si constrângerile termice (temperatura minima si maxima la care va functiona convertorul electronic de putere si masina electrica), trebuie luat în considerare, dar ele vor fi bine studiate doar in cazul in care se va realiza unui model care se va monta pe un vehicul. Pentru studiul experimental pe model de laborator al regimurilor de functionare a unui sistem SAI pentru autovehicule de noua generatie, constrângerile mecanice si cele termice nu vor fi analizate.
Tabel 1 cuprinde o comparatie între cerintele impuse starterului si alternatorului în sistemul conventional, respectiv în sistemul SAI cu actionare directa.
|
Sistemul starter si alternator conventional |
Sistemul starter-alternator integrat (SAI) |
||||
|
Motor termic |
nMT = 500 - 6.000 rpm |
Motor termic |
nMT = 500 - 6.000 rpm |
|
|
|
|
P = 1.2 kW |
|
|
|
PMT = 4 - 6 KW |
|
Alternator |
nA = 3* nMT = 170 - 2.000 rpm |
|
|
Motor: |
TISA =100 to 300 Nm |
|
|
|
|
Masina |
|
Time = 3 -5 s |
|
|
nMT = 500 rpm |
SAI |
electrica |
|
nISA,m = nMT = 500 rpm |
|
|
nS = 10 * nICE =5000 rpm |
|
|
|
PG = PM / 2 |
|
Starter |
TMT = 100 to 300 Nm |
|
|
Generator: |
nISA,g = nMT = |
|
|
TS = TMT / 10 =10 to 30 Nm |
|
|
|
= 500-6000 rpm |
|
|
|
|
Convertor electronic |
Bi-directional, trifazat in punte in tehnologie IGBT |
|
|
|
|
|
de putere |
Limitarea curentului la 10 - |
|
|
Baterie |
U = 12 V |
Baterie |
U = 42 V |
|
|
Integrarea starterului si a alternatorului în aceeasi masina electrica ridica probleme datorita cerintelor diferite din cele doua regimuri de functionare ale masinii electrice. Ambele regimuri electrice sunt dure: atât regimul de motor, când se cere un cuplu mare la pornire, cât si în regimul de generator, când masina electrica functioneaza la viteze mari, deci în domeniul de flux de excitatie slabit si putere constanta.
Masina sincrona cu magneti permanenti interiori (MSMPI) are randamentul bun, densitate mare de putere si are posibilitatea functionarii la viteze mari, cu slabire de flux la putere constanta. Faptul ca magnetii sunt îngropati în mizul rotoric, face din MSMPI o masina hibrida, cuplul fiind produs atât de magneti cât si de reluctanta variabila a circuitului magnetic, fapt ce furnizeaza proiectantului masinii un grad de libertate foarte important în aplicatii de SAI (în special, face posibila obtinerea unui domeniu larg de viteza la putere constanta). Aceste avantaje sunt un factor important în alegerea MSMPI ca solutiei de masina electrica pentru SAI. În Fig. 2, este prezentat rotorul unei MSMPI cu trei straturi de magneti permanenti (pe baza de pamânturi rare, uzual NdFeB). Statorul MSMPI este similar cu cel al unei masini clasice de c.a. trifazat, înfasurarea indusa fiind distribuita în crestaturile miezului feromagnetic lamelat. [1]
Fig. 2 Rotorul unei MSMPI cu trei straturi de magneti permanenti.
2. Dezvoltarea modelului matematic al sistemului SAI cu MSMPI
În stabilirea ecuatiilor de functionare ale MSMPI se au in vedere urmatoarele ipoteze:
fluxurile magnetice de dispersie se neglijeaza;
nu se considera saturatia magnetica;
se neglijeaza efectele demagnetizarii magnetilor permanenti rotorici.
Modelul matematic al MSMPI consta dintr-un sistem de ecuatii diferentiale în referentialul d -q atasat rotorului, care prezinta caracter general atât din punct de vedere functional al masinii, cât si din punct de vedere al reglarii acesteia:
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
Cuplul electromagnetic se calculeaza din derivata coenergiei magnetice :
![]() (5)
(5)
Ecuatia de miscare a rotorului MSMPI este :
![]() . (6)
. (6)
Înlocuind fluxurile în ecuatiile de tensiune (1) si (2), si explicitând derivatele din ecuatiile (3) si (4) de mai sus, se obtine modelul matematic al MSMPI, sub forma ecuatiilor de stare:
![]() , (8)
, (8)
![]() , (9)
, (9)
unde:
![]() - tensiunea
statorica de faza;
- tensiunea
statorica de faza;
![]() ,
, ![]() - inductanta statorica dupa axa d,
respectiv q;
- inductanta statorica dupa axa d,
respectiv q;
![]() ,
, ![]() - componentele dupa axele d si q ale
curentului statoric;
- componentele dupa axele d si q ale
curentului statoric;
![]() rezistenta înfasurarii de faza a
indusului ;
rezistenta înfasurarii de faza a
indusului ;
![]() numarul de perechi de poli;
numarul de perechi de poli;
![]() - cuplul
electromagnetic dezvoltat;
- cuplul
electromagnetic dezvoltat;
![]() viteza unghiulara
electrica a rotorului;
viteza unghiulara
electrica a rotorului;
Pentru simularea functionarii MSMPI se utilizeaza modelul generalizat d-q. Echivalenta dintre masina model si masina reala trifazata se obtine cu ajutorul unei transformari ortogonale, relatiile de transformare fiind:
pentru transformarea de la sistemul a, b, c la sistemul d, q, 0
![]() (10.1)
(10.1)
![]() (10.2)
(10.2)
![]() (10.3)
(10.3)
pentru transformare de la d, q, 0 la sistemul a, b, c
![]() (11.1)
(11.1)
![]() (11.2)
(11.2)
![]() . (11.3)
. (11.3)
Simularea SAI cu MSMPI. Rezultatelor obtinute din simulari
In regim de motor de al pornire (viteza 0) la viteza de baza, 500 rpm, curentul statoric de pe axa q este comandat cu regulatoare cu histerezis, fiind determinat de eroarea de viteza si limitat la o valoare, iar curentul statoric de pe axa d se considera 0, cum se observa in Fig. 3.
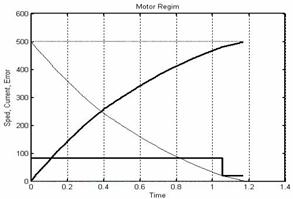
Fig 3. Viteza si curentul statoric de pe axa q in regim de motor.
În regimul de generator (rol de alternator), al MSMPI, energie electrica obtinuta reîncarca, printr-un redresor, bateria de acumulatoare, strategia de comanda adoptata este controlul curentului de reîncarcare. In acest regim curent cerut pe directia q are o valoare negativa, iar curentul pe directia d este zero. Curentul de reincarcare este suma redresata a celor doi curentilor statorici Id ai Iq.
Schema bloc a sistemului SAI cu MSMPI realizata în mediul Matlab-Simulink, este prezentata în Fig. 4.
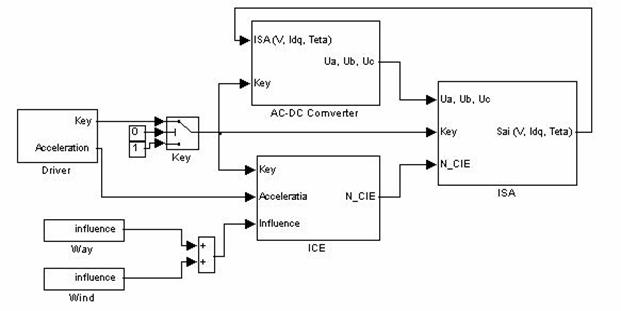
Fig 4. Schema bloc a sistemului SAI cu MSMPI.
În simularea functionarii SAI cu MSMPI, în blocul MSMPI se adopta ca intrari viteza si inertia, iar ca iesiri viteza, în regim de motor, respectiv curentul de reîncarcare, în regim de generator.
Ca detalii, sunt redate în Fig. 5 si Fig. 6, modelele de simulare ale MSMPI, respectiv convertorului c.a./c.c. asociat acesteia.
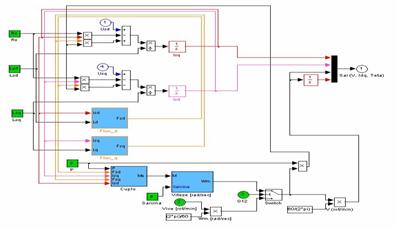
Fig. 5 Diagrama Matlab-Simulink a MSMPI pentru SAI.
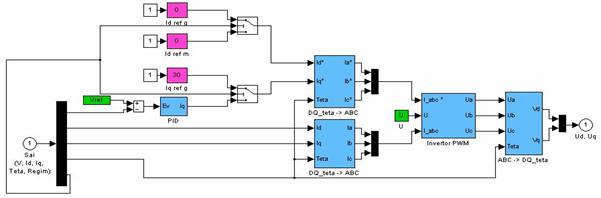
Fig. 6 Diagrama Matlab-Simulink a convertorului c.a./c.c. pentru SAI.
Rezultatele simularii sunt prezentate în cele ce urmeaza.
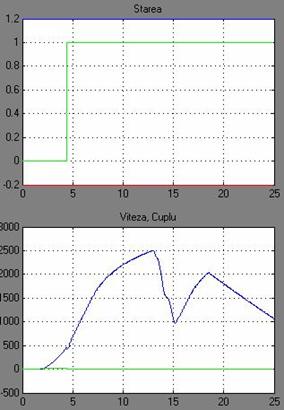
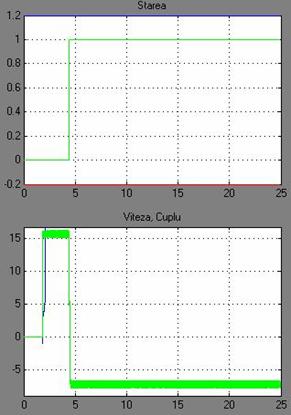
Fig. 7 Parametrul stare, viteza SAI si cuplul MSMPI.
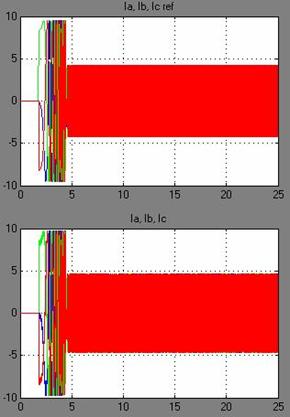
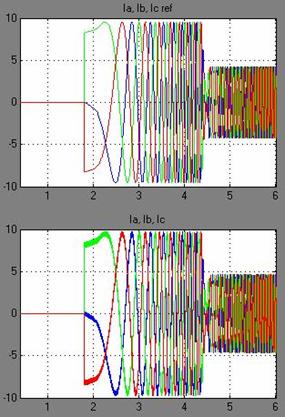
Fig. 8 Curentii statorici ai MSMPI in aplicatii SAI.
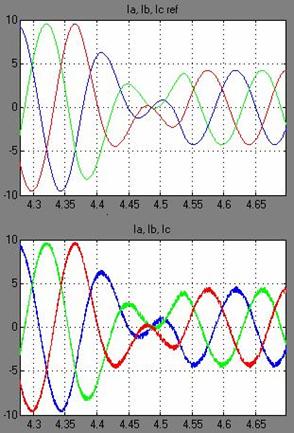
Fig. 9 Curentii statorici ai MSMPI in aplicatii SAI la trecerea din regim de motor in regim de generator.
Studiul experimental al sistemului SAI
Model de laborator al unui sistem SAI cu MSMPI pentru autovehicule de noua generatie
Pe durata mobilitatii Erasmus pe care a facut-o la Universitatea Jules Vernes din Amiens, Franta am facut o vizita la Ecole des Hautes Etudes Industrielles (HEI), Université catholique de Lille, Franta.
În Laboratorul de masini electrice de
Componentele principale ale standului experimental sunt un volant de inertie, o masina asincrona cu rotor în scurtcircuit, o masina sincrona cu magneti permanenti, o masina de c.c. si patru invertoare de tensiune comandate cu ajutorul a trei calculatoare PC dotate cu placi dSPACE. În continuare, sunt prezentate câteva caracteristici tehnice ale standului experimental:
Din motive economice, standul experimental a fost construit cu componente disponibile pe piata, suficiente, însa, pentru studiul comportarii unui SAI.
Standul experimental are o structura modulara, care poate fi modificata astfel încât sa poata fi studiat SAI atât cu masina asincrona, cât si cu masina sincrona cu magneti permanenti. Utilizarea volantului in aceste experimente este necesara pentru ca emulatorul de masinii cu ardere interna (masina de curent continuu) sa aiba o inertie comparabila cu cea a unul motor termic real. Capacitatea volantului de inertie este de 9870 J sau 2,74 Wh. Limitele pentru turatia volantului este 3000 rpm.
În Fig. 10 este prezentata fotografia standului experimental realizat pentru studiul modelului de laborator al unui prototip de SAI, componente standului sunt indicate prin sageti.
Masina de curent continuu (3 kW / 1500 rpm), este alimentata cu PWM, controlul realizându-se de catre controlerul DS1104 dSPACETM (PowerPC 603e / TI DSP TMS320F240).
Aceasta este montata coaxial la rotorul MSMPI (2.8 kW / 3000 rpm). Statorul acesteia este conectata la bus-ul de tensiune continua (3300 µF / 800V) prin PWM si este controlat printr-un controler DS1103 dSPACETM Card (PowerPC 604e / TI DSP TMS320F240).
Toate convertoarele PWM sunt în tehnologie
IGBT, au aceeasi structura si sunt furnizate de SEMIKRONTM
(1200V/50A). Sunt compuse dintr-un modul redresor SKD 51/14, trei tranzistoare
IGBT de tip SKM 50 GB 123 D si unul SKM
Interfetele de masura si control între senzori si controlerele dSPACETM face posibil reglajul in timp real.
Parametrii MSMPI si a volantei:
Coeficient de frecari viscoase: B = 0.0011 Nm·s·rad-1.
Fig. 10 Standul experimental realizat pentru studiul modelului de laborator al SAI cu MSMPI.
4.2. Rezultatele experimental al studiului regimurilor de functionare al unui sistem SAI
Schema bloc a sistemului SAI cu MSMPI realizata în mediul Matlab-Simulink, care a fost implementata pe placa dSPACE a standului, unde au fost realizate experimentele este prezentata în Anexa 1.
Experimentele realizate ating marea majoritate a regimurilor de functionare la care este supusa MSMPI in sistem SAI.
In urmatoarea diagrama se pot observa diferitele momente ale functionarii sistemului SAI.
Fig. 11 Diagrama variatia turatiei SAI si diferitele regimuri de functionare
In cele ce urmeaza prezint schematizat regimurilor de functionare ale SAI, cu urmatoarele specificatii:
(N) înseamna ca acest regim nu a fost studiat in experiment si (D) înseamna ca acest regim a fost studiat in experiment,
numarul atasat fiecarui regim se regaseste în diagrama din Fig. 4.
Regimurilor de functionare ale SAI:
Regim stationar
de generator:
la viteze joase, (N) 5
la viteze înalte; (N) 7
Regim dinamic:
de motor:
pornirea, cu dezvoltarea cuplului necesar si atingerea vitezei dorite; (D) 1
de generator:
variatii de viteza în regim de generator:
la viteze joase:
accelerari, (D) 3
decelerari; (D) 4
la viteze mari:
accelerari, (N) 6
decelerari; (N) 8
oprirea; 10
schimbari de regim:
trecerea din regim de motor în regim de generator, (D) 2
trecerea din regim de generator în regim de motor (cuplul SAI are acelasi sens cu MAI); (N) 9
oprirea motorului. (N) 10
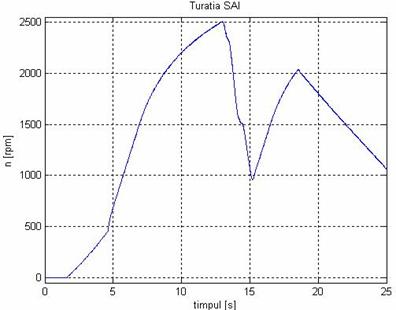
Fig. 12 Variatia turatiei MSMPI a sistemului SAI - rezultate experimentale.
In Fig. 12 se poate vizualiza variatia turatiei MSMPI a sistemului SAI rezultate în urma experimentelor realizate pe stand pe diferite intervale. Se observa ca motorul porneste la momentul t=2s MSMPI functionând in regim de motor pâna la t=4,8s. De la momentul t=4,8 MSMPI lucreaza in regim de generator, viteza sa fiind impusa de emulatorul motorului de ardere interna.
Intervalul de timp t= [4,8s, 13s] precum si intervalul t=[15,2s, 18s], corespund accelerarii ansamblului SAI-MAI, iar intervalele t=[13s, 15.2s] si t=[18s, 25s] decelerarii ansamblului SAI-MAI.
Curentii Id si Iq, din statorul MSMPI, obtinuti experimental se pot vizualiza in Fig. 6 a). Se observa ca acestia au oscilatii in jurul valorilor curentilor de referinta. Pina la momentul pornirii motorului Id si Iq sunt nuli. In regim de motor Id ref=0 iar este limitat la Iq ref . In regim de generator Id ref=0 iar Iq ref=5. Acestia se pot vizualiza in detaliu in momentul trecerii din regim de motor in regim de generator in Fig. 13 b).
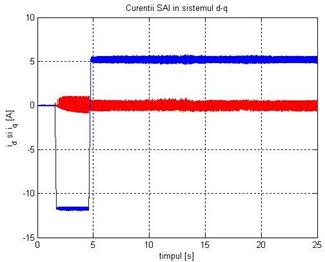
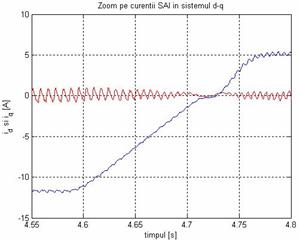
Fig. 13 a)Curentii Id si Iq ai MSMPI - rezultate experimentale;
b)Curentii Id si Iq ai MSMPI la trecerea din regim de motor in regim de generator - rezultate experimentale.
Atâta timp cât SAI functioneaza in regim de motor, puterea este pozitiva si creste proportional cu viteza. In regim de generator puterea isi schimba sensul, deci se furnizeaza energie catre bus-ul de tensiune continua (bateria). La fel ca în regim de motor, amplitudinea este proportionala cu viteza, variatiile puterii regasindu-se in variatiile vitezei, cum se vede in Fig. 14.
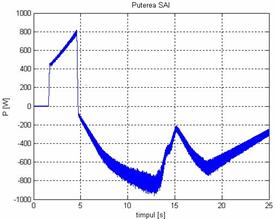
Fig. 14 Puterea SAI - rezultate experimentale.
În Fig. 15 a) se prezinta curentul statoric pe o faza, obtinut experimental. La pornirea SAI, in regim de motor, amplitudinea acestuia este de 9,5 A, iar in regim de generator amplitudinea este de 4 A. La o vizualizare detaliata a acestuia se observa ca are o variatie sinusoidala si in momentul trecerii din regim de motor in regim de generator curentul se defazeaza cu 1800 (Fig. 8 a)).
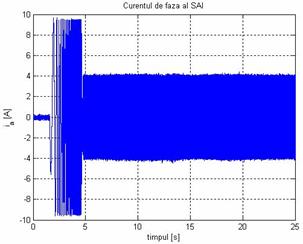
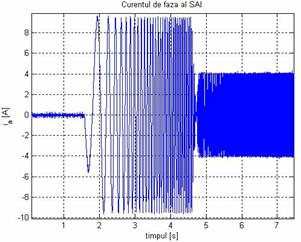
Fig. 15 a) Curentul statoric - rezultate experimentale;
b) Curentul statoric al SAI, detaliat - rezultate experimentale.
Curentii statorici din cele 3 faze se pot observa în Fig. 16. Variatia lor este sinusoidala, defazajul dintre ele este de 3π/2.
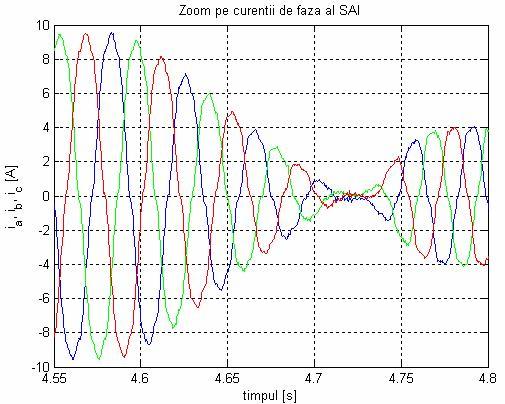
Fig. 16 Curentii statorici ai SAI, la trecerea din regim de motor in regim de generator - rezultate experimentale.
Prezentare stand experimental pentru studiul
sistemului SAI cu MSMPI din Universitatea Tehnice din Cluj-Napoca
Se urmareste realizarea unui stand experimental de laborator pentru studiului comportarii MSMPI in aplicatii SAI in laboratorul de Micomotoare, in laboratoarele Universitatii Tehnice din Cluj-Napoca. Modelul experimental de laborator format din MSMPI alimentat si comandat prin invertor si un emulator de motor cu ardere interna (masina de curent continuu) este prezentat schematizat in Fig. 17.
Fig. 17 Modelul experimental de laborator al SAI din laboratorul de Micomotoare, din cadrul Universitatii Tehnice din Cluj-Napoca.
Alimentarea MSMPI se va face cu un convertor c.c./c.a. în punte trifazata în tehnologie IGBT (Fig 18). A fost necesara proiectarea acestuia (vezi Anexa 2 si Anexa 3). Pentru executarea sa s-au folosit tranzistoare de tip IRG4PH50KD si driver IR2110.
Fig 18. Convertor electronic de putere.
Comanda numerica a sistemului de actionare se va face cu controler-ul DSP de tip TMP320F240PQ de la Texas Instruments, pe cere îl avem in laborator.
Se va studia comportarea ansamblul format din MSMPI si convertorul AC-DC. In Fig. 19 se prezinta schematizat sistemul de comanda si control al SAI (model de laborator).
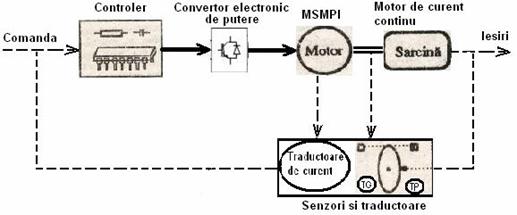
Figura 19. Diagrama modelului de laborator al sistemului SAI cu MSMPI.
Sistemul de actionare reprezentat in Fig. 19 este format din 5 parti:
controlerul,
convertorul electronic deputere,
blocul motor (MSMPI), care furnizeaza informatii blocului senzori si traductoare,
sarcina, motor de curent continuu,
blocul reprezentat de senzori si traductoare (tahogeneratoare, traductoare de pozitie si de curent), care are rolul de a monitoriza comportarea sistemului oferind un semnal feed-back controlerului.
Se lucreaza la elabora unui 'soft' pentru DSP, conform algoritmilor de comanda si control, care in prima etapa va fi: in regimul de motor (rol de starter), al MSMPI, reglarea se va face prin intermediul unor regulatoare bipozitionale cu histerezis al curentului statoric, în functie de eroarea de turatie, iar in regimul de generator (rol de alternator), strategia de comanda va fi controlul curentilor statorici. Munca de cercetare in domeniul sistemului SAI se va canaliza spre realizarea unor strategii de comanda cit mai eficiente (exemplu DTC); in urma comparatiilor dintre aceste strategii de comanda se va alege varianta cea mai buna de sistem SAI.
În conformitate cu caietul de sarcini si conditiile de exploatare ale starterului, respectiv, alternatorului unui autovehicul, sa ales utilizarea masinii sincrone cu magneti permanenti interiori (MSMPI) pentru realizarea unui stand experimental SAI pentru autovehicule de noua generatie.
Pâna
in stadiul actual al cercetarii de doctorat s-au realizat simulari a
diferite strategii de control pentru SAI cu MSMPI, în mediul MATLAB/Simulink.
Acestea au fost implementate printr-o placa dSPACE pe standul experimental
din Laboratorul de masini electrice de
Rezultatele experimentale obtinute, studiind comportarea MSMPI in diferite regimuri de functionare, arata ca MSMPI corespunde cerintelor tehnice privind utilizarea sa in aplicatii SAI. Acesta fiind un studiu preliminar, este de dorit ca in viitorul apropiat sa se realizeze stand experimental de laborator pentru studiului comportarii MSMPI in aplicatii SAI in laboratorul de Micomotoare, din cadrul Universitatii Tehnice din Cluj-Napoca. Acesta va fi format din MSMPI alimentat si comandat prin invertor si un emulator de motor cu ardere interna (masina de curent continuu).
Bibliografie
1. Soong W. L, Ertugrul N., Investigation of Interior Permanent Magnet Offset-Coupled Automotive Integrated Starter/Alternator, Conf. Records of IEEE - IAS 2001 Meeting, Chicago, USA, 2001, CD-ROM.
2. Bae B., Sul S., Practical Design Criteria Permanent Magnet Synchronous Motor for 42V Integrated Starter-Alternator, Conf. Records of IEMDC' 2003, Wisconsin, USA, 2003, CD-ROM.
3. Chédot L., Friedrich G., Comparisons of Direct and Adaptative Optimal Controls for Interior Permanent Magnet Synchronous Integrated Starter Generator, Conf. Records of IEMDC' 2003, Wisconsin, USA, 2003, CD-ROM.
4. Lovelace E. C., et al., An Interior PM Starter/Alternator for Automotive Applications, Conf. Proc. of ICEM' 98, Istanbul, Turkey, 1998, Vol. 3, pp. 1802-1808.
3. Carricchi F., Capponi F., Crescimbini F., Solero L., Permanent-Magnet Direct-Drive Starter/Alternetor Machine with Weakened Flux Linkage for Constant-Power Operation over Extremely Wide Speed Range, Conf. Rec. 2001 IEEE-IAS 36, Vol. 3, pp. 1626-1633.
6. Miller J. R. et. al. Prognosis for Integrated Starter Alternator System in Automotive Applications, Conf. Proc. of EPE-PEMC 2002, Dubovnik, Croatia, CD-ROM.
7. Moldovan T., Radulescu M.M., Capolino G.A., Design and Simulation of an Interior Permanent-Magnet Synchronous Machine-Based Automotive Integrated Starter-Alternator, Acta Electrotehnica (Romania), Vol. 45 (2004), No. 3, pp. 267-270.
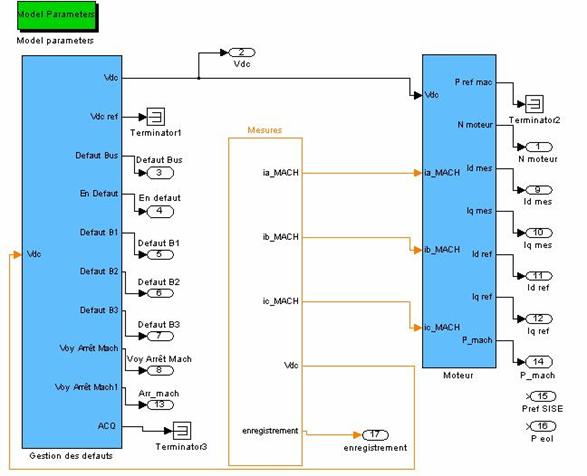
Anexa 1
Schema bloc a sistemului SAI cu MSMPI realizata în mediul Matlab-Simulink, care a fost implementata pe placa dSPACE a standului, unde au fost realizate experimentele.
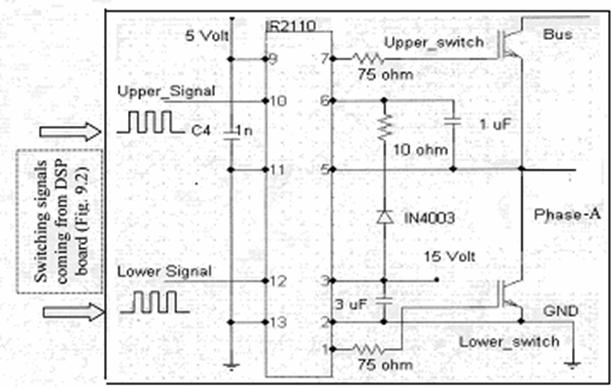
Anexa 2
Schema de conectare, protectie si alimentare a driver-ului IR 2110 folosit in convertor c.c./c.a. în punte trifazata în tehnologie IGBT.
Anexa 3
Proiectarea cablajului placi cu circuite imprimate, care contin driver-ele se face dupa schema de mai jos:

|
