ALTE DOCUMENTE
|
||||||||||
U n i v e r s i t a t e a d i n p i t e s t i
c a t e d r a I e i t
Laboratorul de electronica auto
Lucrarea nr. :
INJECŢIA ELECTRONICĂ DE BENZINĂ MONOPUNCT
COMANDATĂ CU MICROCONTROLER
1. SCOPUL LUCRĂRII
Lucrarea este destinata studierii unui echipament electronic de injectie monopunct realizat în jurul unui microcontroler (MCU) pe 8 biti de tipul MC68HC11 produs de firma Motorola. Se urmareste modul de interfatare cu microcontrolerul a traductoarelor ce masoara parametrii motorului (temperatura motor, temperatura aer, pozitie clapeta, pozitie volant, traductor oxigen, etc.), precum si modul de comanda al elementelor de executie (injector, motor pas cu pas, pompa de benzina, bobina de inductie, relee, etc.). Tot aici, folosindu-se sistemul de achizitie a datelor, studiat într-o lucrare anterioara, se determina caracteristica timpului de injectie functie de turatie si functie de pozitia clapetei de acceleratie.
2. CONSIDERENTE TEORETICE
2.1. Introducere
Pentru cresterea performantelor si confortului automobilelor moderne acestea sunt dotate cu echipamente electonice de control ce contin unul sau doua microprocesoare. În general, functiile minime ce trebuie realizate de aceste echipamente, denumite si calculatoare de bord, constau în controlul timpului de injectie si al unghiului de avans astfel încât performantele motorului sa se încadreze în normativele, tot mai severe, adoptate pe plan mondial privind continutul 15215u2011p noxelor din gazele de ardere, consumul de combustibil, etc. Pe lânga functiile anterioare, unele calculatoare de bord pot realiza si alte functii: ABS, comanda airbag-ului, controlul suspensiilor, asistarea directiei, autodiagnosticare, etc.
2. 2. Descrierea echipamentului de comanda electronica a injectiei de benzina monopunct
Echipamentul de injectie din laborator realizeaza controlul timpului de injectie si al unghiului de avans. Schema bloc, de principiu a unei injectii de benzina monopunct este prezentata în fig.1. Principiul de lucru al sistemului consta în masurarea parametrilor motorului termic dupa care, pe baza unor caracteristici memeorate, se elaboreaza o comanda spre injector si bobina de inductie. În elaborarea comenzilor se mai fac o serie de corectii în functie de regimul concret de lucru în care se afla motorul termic.
Pentru elaborarea comenzilor echipamentul în discutie efectueaza masuratori asupra urmatoarelor marimi: turatia motorului termic, pozitia clapetei de acceleratie, temperatura aerului, temperatura agentului de racire, semnalul de la traductorul de oxigen (sonda l
Fig.1. Schema bloc de principiu a unei injectii de benzina monopunct
Calculatorul de bord controleaza: alimentarea pompei de benzina, încalzirea sondei l, actionarea motorului pas cu pas al bypas-ului de aer, actionarea injectorului, cuplarea bobinei de inductie.
Conectarea calculatorului de bord cu echipamentele externe.
Schema de conectare a traductoarelor si a elementelor de executie la calculatorul de bord se prezinta în figura 2.
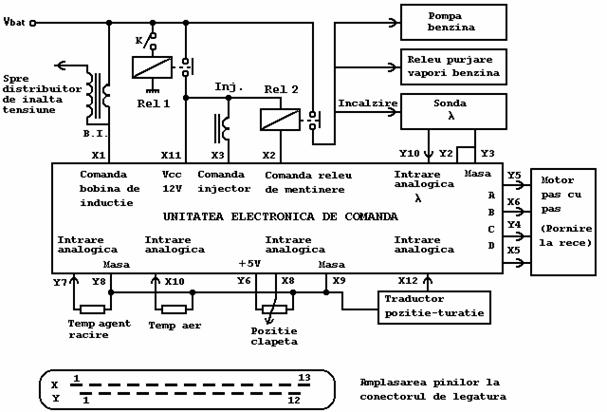
Fig.2. Schema de conectare a elementelor externe la calculatorul de bord
2.2.2. Interfatarea cu MCU a semnalelor provenite de la traductoare.
În functie de caracterul analogic sau digital, al semnalelor provenite de la traductoarele folosite în determinarea conditiilor de lucru ale motorului termic, acestea se conecteaza la intrarile analogice, respectiv digitale ale microcontrolerului. Pentru a proteja intrarile microcontrolerului se iau unele masuri de protectie. În cele ce urmeaza ilustram modul de conectare a traductoarelor la microcontroler.
a) Conectarea traductoarelor de temperatura
Masurarea temperaturii aerului si a agentului de racire (apa) se face cu ajutorul unor traductoare rezistive (termistoare), modul de conectare la intrarile analogice ale MCU se arata în fig.3.
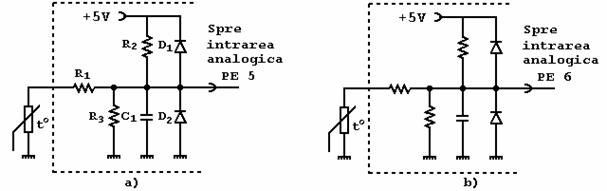
Fig. 3. Conectarea traductoarelor de temperatura; a) pentru agentul de racire; b) pentru aer
b) Conectarea traductorului de pozitie a clapetei de acceleratie
Acest traductor este de tip potentiometric, axul potentiometrului este actionat simultan cu axul pe care este plasata clapeta de acceleratie. Schema de conectare la microcontroler este prezentata în fig.4. De remarcat ca sunt utilizate doua intrari analogice: una pentru determinarea pozitiei statice a clapetei (cazul mersului uniform), iar cealalta pentru sesizarea vitezei de variatie a clapetei (cazul accelerarilor sau decelerarilor).
Fig. 4. Schema de conectare a potentiometrului în vederea determinarii pozitiei clapetei
c) Conectarea sondei l
Traductorul de oxigen, sonda l, este conectata la intrarea analogica PE4 a microcontrolerului printr-un montaj auxiliar realizat cu circuitul LM2904N.
Fig. 5. Conectarea sondei l la microcontroler
d) Conectarea traductorului de turatie-pozitie
Pentru masurarea turatiei si determinarea pozitiei se utilizeaza un singur traductor de inductie. Semnalul generat de acest traductor este prelucrat cu ajutorul unui circuit specializat de tipul LM 1815.
Circuitul LM 1815 poate prelucra semnale provenite de la diferite tipuri de traductoare ce au iesirea bipolara. Practic, la iesirea circuitului se genereaza un monoimpuls pentru fiecare trecere negativa prin zero a semnalului de intrare (dat de traductor). Armarea circuitului (validarea generarii impulsurilor de iesire) se face numai daca semnalul de intrare depaseste pe frontul crescator al sau un anumit prag. Armarea circuitului este valabila pâna la prima declansare a impulsului de iesire. În acest mod, o eventuala trecere prin zero a semnalului de intrare este ignorata daca aceasta nu a fost precedata de o depasire în sens pozitiv a pragului.
Valoarea pragului de armare poate fi modificata prin modul de conectare al pinului 5 al circuitului. În continuare prezentam cele trei moduri de operare ale circuitului.
Modul 1: Pinul 5 în gol
Aceasta conexiune permite alegerea adaptiva a pragului de armare. Pentru semnale de intrare mai mici de 135mV vârf la vârf, pragul de armare are valoarea tipica de 45mV. Daca semnalul este mai mic de 30mV nu se genereaza impulsuri.
Pentru semnale de intrare mai mari de 230mV vârf la vârf armarea circuitului se face la 80% din tensiunea de vârf a intrarii. Semnalele de intrare trebuie sa depaseasca acest prag în sens pozitiv pentru armarea circuitului si sa treaca prin zero în sens negativ pentru declansarea lui.
Modul 2: pinul 5 conectat la V+
Pentru aceasta conexiune pragul de armare este fix si are valoarea de 200mV. Daca semnalul de intrare este sub aceasta valoare circuitul nu genereaza impulsuri de iesire. Semnalele de intrare trebuie sa depaseasca acest prag în sens pozitiv pentru armarea circuitului si sa treaca prin zero în sens negativ pentru declansarea lui.
Modul3: pinul 5 conectat la masa
În acest caz pragul de armare este fixat la valoarea de 0V ( 25 mV). Trecerea pozitiva prin zero armeaza circuitul, iar trecerea negativa prin zero declanseaza impulsul.
Impulsurile generate de catre circuit sunt disponibile la pinul 12 al acestuia. Latimea acestora este impusa de circuitul RC conectat la pinul 14, durata unui impuls calculându-se dupa relatia: t=0,673RC. Valoarea de vârf a semnalului de intrare este memorata de catre un condensator extern conectat la pinul 7.
În unele aplicatii apare necesitatea de a lucra cu impulsuri generate extern, caz în care acestea se aplica la pinul 9. Dirijarea la iesirea 10 a circuitului a impulsurilor generate intern sau a celor preluate din exterior, se face punând zero logic respectiv unu logic pe intrarea de selectie de la pinul 11.
Modul de utilizare a circuitului LM1815 în sistemul de injectie este prezentat în fig. 6.
Fig. 6. Schema de prelucrare a semnalului de la traductorul de pozitie-turatie
2.2.3. Interfatarea cu MCU a elementelor de executie
Controlul elementelor de executie ale echipamentului de injectie este relizat prin intermediul porturilor de iesire ale microcontrolerului. Modul concret de conectare al acestor elemente este prezentat mai jos.
a) Comanda bobinei de inductie
Bobina de inductie este comandata de la iesirea 5 a portului A al microcontrolerului. Semnalul de comanda este trecut prin doua buffere inversoare dupa care se aplica unui circuit specializat de tipul VBO 20. Sistemul de aprindere este integral electronic (legea de avans este memorata într-un EPROM) si realizat tot cu ajutorul microcontrolerului HC11. Timpul de conectare a bobinei de inductie, la tensiunea de alimentare (12V), este dependent de turatia de lucru a motorului termic. Dependenta timpului de conectare se studiaza în partea experimentala a lucrarii.
Fig. 7. Schema de comanda a bobinei de inductie
b) Comanda motorului pas cu pas
Pornirea la rece este facilitata prin intermediul unui motor pas cu pas ce actioneaza asupra unui baypas de aer. Comanda motorului pas cu pas se face prin portul D al microcontrolerului, iar semnalele sunt amplificate de catre circuitul specializat de tipul L293D.
Modul de conectare la portul D al MCU se prezinta în figura de mai jos.
Fig.8. Schema de comanda a motorului pas cu pas.
c) Comanda injectorului si a releelor de actionare
Având în vedere ca, atât injectorul cât si releul de mentinere Rel2, sunt sarcini cu caracter inductiv, masurile de protectie si comanda acestora se face în mod similar. Schema electrica de comanda se prezinta în figura 9.
Fig. 9. Schema de comanda a injectorului si a releului de mentinere.
2.2. 3. Prezentarea unitatii centrale de calcul
Unitatea de procesare a semnalelor si de elaborare a comenzilor este realizata în jurul unui microcontroler pe 8 biti de tipul M68HC11. Schema bloc a unui astfel de circuit se prezinta în figura urmatoare.
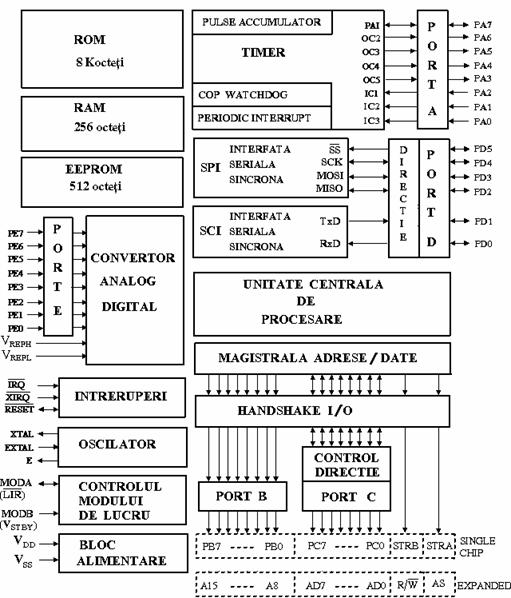
Fig.10. Schema bloc a microcontrolerului M68HC11
Arhitectura 68HC11 contine un numar de 5 porturi paralele care pot fi configurate ca porturi I/O de uz general sau pot fi subordonate unor periferice ale MCU. În ultima sitatie exista urmatoarea corespondenta între porturi si periferice: portul A subordonat unitatii timer; porturile B si C destinate accesului memoriei externe; portul D subordonat interfetelor de comunicatie seriala; portul E subordonat convertorul A/D.
Pentru prelucrarea semnalelor analogice, circuitul dispune de un ansamblu format dintr-un multiplexor analogic cu 8 cai si un convertor A/D cu aproximatii succesive pe 8 biti.
Circuitul dispune de facilitati puternice în ceea ce priveste: generarea de impulsuri cu frecventa si factor de umplere programabili, masurarea duratelor de timp a unor impulsuri, contorizarea evenimentelor externe, etc.
O facilitate suplimentara a sistemului este aceea ca orice functie a unui echipament periferic poate genera o întrerupere mascabila soft catre unitatea centrala. Pe lânga aceste surse interne de întrerupere circuitul dispune si de doua cereri externe de întrerupere (IRQ si XIRQ).
Pentru o documentare mai ampla privind structura si modul de operare al microcontro-lerului se poate consulta anexa de la sfârsitul lucrarii sau un manual de utilizare.
Pentru sistemul de injectie studiat, din analiza figurilor anterioare, se observa urmatoarea utilizare a porturilor MCU:
- traductoarele analogice sunt conectate, cum era si firesc, la intrarile portului E;
- traductoarele de tip "totul sau nimic" sunt conectate la o parte din intrarile portului A, intrari configurate astfel încât sa poata masura durata si frecventa semnalelor;
- comanda elementelor de executie se face printr-o parte din iesirile portului A, iesiri programate spre a genera impulsuri de latime controlabila;
- comanda motorului pas cu pas este facuta prin portul D configurat ca port de iesire de uz general;
- porturile A si B sunt folosite pentru accesarea memoriei externe în care se afla stocate caracteristicile motorului termic si programul de lucru al sistemului de calcul;
3. DESFĂsURAREA LUCRĂRII
3. 1. Studiul echipamentului de injectie monopunct.
Se identifica si se studiaza modul de amplasare, conectare si functionare a principalelor componente ale sistemului de injectie din cadrul laboratorului. O atentie deosebita se va acorda modului de realizare a legaturilor de masa între calculatorul de bord si restul echipamentelor.
Întrebari:
1. Care este rolul releelor REL1 si REL2 din schema de conexiuni prezentata în fig. 2 ?
2. Care este principiul de functionare al injectorului de benzina si cum se poate controla cu acesta cantitatea de benzina consumata de motorul termic ?
3. Care este rolul sondei l si cum intervine aceasta în controlul injectiei de benzina ?
4. Cum se determina pozitia clapetei de acceleratie (pentru sistemul de injectie studiat) si de ce este necesara aceasta determinare? Care sunt inconvenientele unei astfel de abordari si cum ar putea fi ele eliminate?
5. Ce rol are traductorul conectat la intrarea X12 (fig. 2) a calculatorului de bord ?
6. Ce rol au diodele D1 si D2 din fig. 3.a) conectate la intrarea analogica a MCU ?
7. De ce semnalul de la pozitie clapeta se aplica la doua intrari analogice ale MCU ?
8. Care este rolul circuitului din fig.5 în prelucrarea semnalului dat de la sonda l
9. Circuitul LM 1815 ar putea prelucra semnalul preluat de la ruptorul unei aprinderi clasice ? Daca da, care sunt masurile ce se impun ?
10. Care este rolul inversoarelor logice din figurile 7 si 9 ?
3. 2. Conectarea echipamentului de achizitie a datelor la calculatorul de bord.
Pentru determinarea caracteristicilor statice de injectie ale echipamentului studiat se utilizeaza sistemul de achizitie a datelor din dotarea laboratorului. Conectarea sistemului de achizitie la calculatorul de bord se face prin intermediul circuitului de mai jos.
--- schema de conectare ---
3. 3. Determinarea caracteristicilor statice de injectie.
Dupa conectarea echipamentelor si realizarea conexiunilor de masa se determina urmatoarea dependenta statica a timpului de injectie fuctie de pozitia clapetei, turatia si temperatura motorului termic.
Modul de lucru:
Se deconecteaza traductorul de pozitie-turatie din conectorul sau, iar în locul acestuia se aplica un semnal sinusoidal provenit de la un generator de frecventa variabila. Reglarea turatiei este echivalenta cu modificarea frecventei semnalului. Pentru echipamentul din laborator, frecventa arborelul motor este de doua ori mai mica fata de cea a generatorului.
Traductorul de temperatura motor (apa) se introduce într-o incinta termostatata a carei temperatura poate fi reglata.
Dupa stabilirea temperaturii dorite, se fixeaza o valoare a unghiului clapetei (cu ajutorul mecanismului conceput acestui scop) dupa care se actioneaza asupra frecventei generatorului de semnal.
Pentru pozitii ale clapetei din 5 în 5 grade se determina timpul de injectie pentru turatii cuprinse în domeniul 800 6000; reglajul turatiei se face din 500 în 500 rpm.
Determinarile anterioare se reiau de la temperatura camerei pâna la 100 C cu un pas de 10 C. Rezultatele se trec în tabele similare celui ce urmeaza.
CONŢINUTUL REFERATULUI
Prelucrarea datelor si trasarea caracteristicilor pe baza rezultatelor experimentale se vor realiza în MATLAB. Referatul trebuie sa contina în mod obligatoriu urmatoarele:
tabelele cu datele experimentale;
programele MATLAB pentru prelucrarea si trasarea caracteristicilor;
programele PSPICE sau MSIM 52 utilizate în simularea aprinderilor testate;
comentarii si observatii la rezultatele experimentale obtinute;
raspunsul la întrebari.
|
