Pe masura dezvoltarii fortelor de productie, omul fiind elementul hotarator in cadrul acestora, a aparut necesara - in special in conditiile tehnicii moderne - efectuarea de studii si cercetari referitoare la munca, avand ca scop mentinerea la un nivel cat mai inalt a starii fizice si psihice a acestuia, pentru a-l face sa poata raspunde in mod corespunzator cerintelor impuse de introducerea progresului tehnic.
Alaturi de progresul tehnic, care a determinat schimbari fundamentale in munca omeneasca, un rol deosebit in dezvoltarea acestor studii si cercetari a avut evolutia conceptiei omului despre munca si viata si in general, evolutia stiintelor care au ca obiect munca.
Astfel, progresul tehnic materializat prin introducerea pe scara din ce in ce mai larga a mecanizarii si automatizarii proceselor, a condus la schimbarea raportului intre munca fizica si cea intelectuala, in sensul ca executantul devine tot mai mult un operator si un conducator al procesului.
Pe de alta parte, echipamentele/instalatiile devin tot mai complexe, mai scumpe, se uzeaza moral mai rapid si au astfel o viata mai scurta in productie decat executantul. De aceea, devine necesara concentrarea preocuparilor asupra omului, in sensul adaptarii lui la cerintele acestora, sub aspectul cunostintelor profesionale si al cerintelor fiziologice si psihologice necesare unei deserviri eficiente, precum si al adaptarii echipamentelor/instalatiilor la caracteristicile biologice si psihologice ale omului, pentru a solicita din partea acestuia un minimum de efort si pentru a asigura functionarea lor cu randament maxim si inlaturarea eventualelor pagube/accidente care ar putea fi destul de costisitoare.
Totodata, oamenii au devenit mai exigenti in ce priveste confortul, conditiile de viata si de munca, solicitand spatii luminoase si bine aerisite, echipamente care sa le usureze munca, transporturi mai confortabile, locuinte mai bune etc.
Realizarea acestor deziderate a dus la dezvoltarea stiintelor care studiaza diferitele laturi ale muncii omenesti si anume igiena si securitatea muncii, fiziologia muncii, psihologia muncii, economia muncii, precum si organizarea muncii, careia ii revine rolul de a sintetiza rezultatele cercetarilor specialistilor din toate celelalte domenii, precum si optimizarea relatiilor om-munca-mediu.
Complexitatea masinilor si a proceselor de productie a determinat insa din ce in ce mai multe situatii in care specialistii care studiau diferitele laturi ale muncii omenesti sa nu mai poata rezolva singuri intreaga gama de probleme ridicate de cerintele practice ale dezvoltarii productiei si au impus necesitatea conlucrarii lor in grup pentru a gasi solutiile cele mai eficiente.
Necesitatea conlucrarii in grup a specialistilor a condus la aparitia unei noi discipline, respectiv a unei noi stiinte - denumita ergonomie - care studiaza munca sub toate aspectele ei, inmanunchind intr-un tot unitar toate disciplinele si stiintele care aveau preocupari unilaterale in acest domeniu.
Ergonomia a fost definita ca o stiinta interdisciplinara care urmareste realizarea unor raporturi optime intre om - mijloc de munca - mediu (fizic si social), cu efecte deosebite in ce priveste cresterea productivitatii muncii si imbunatatirea conditiilor de munca ale omului. Ea nu se confunda insa cu nici una din stiintele care participa la definirea ei, nu se substituie acestora si nici nu le prejudiciaza, ci, dimpotriva, prin conceptia sa, creeaza premisele valorificarii datelor din stiintele respective, in scopul optimizarii raporturilor dintre om si munca sa.
Ergonomia nu constituie deci monopolul biologului, antropologului, psihologului, sociologului, inginerului, economistului sau organizatorului, ci cu ea se face apel la acesti specialisti pentru a furniza organizatorului maximum de informatii privind posibilitatile optime ale omului de a se integra in procesul de munca. (fig 1.1.)
Etimologic, denumirea de "ergonomie" provine din doua cuvinte de origine greaca: "ergon" - care inseamna munca, putere, forta - si "nomos" care inseamna stiinta, teorie, lege, regula. Deci, ergonomia este considerata ca "stiinta muncii", avand ca obiect de studiu relatia "om-munca", sintetizand/coreland datele tuturor stiintelor disciplinelor preocupate de acest domeniu, formuland principii, reguli proprii indeosebi cu caracter aplicativ, care sa asigure adaptarea reciproca dintre om si munca sa.
Ea este o stiinta multidisciplinara prin metode, unitara prin obiectivul sau care il constituie optimizarea relatiei om-munca, prin adaptarea muncii la om, a omului la meseria sa, in scopul cresterii continue accentuate a productivitatii muncii in conditiile unui consum rational de energie umana.
Ergonomia foloseste in mod integrat cunostintele disciplinelor stiintelor bio-psiho-medicale (fiziologia, psihologia, ecologia, antropologia, biomecanica, mecanica muncii, igiena, etc.), tehnico-economice (stiinta conducerii, studiul muncii, estetica industriala, ingineria tehnologica, economia industriei, cibernetica, ingineria constructiilor de masini, tehnica securitatii muncii, etc.), sociala (sociologia muncii), toate vizand mentinerea indelungata la nivel optim a capacitatii de munca, a promovarii starii de sanatate a omului.
In figura 1.1 sunt prezentate sintetic principalele discipline/stiinte la care apeleaza ergonomia care ii confera caracterul de multidisciplinaritate/interdisciplinaritate.
Datorita acestui caracter, avand in vedere complexitatea functiilor umane marea diversitate a activitatilor de munca, cercetarile ergonomice, aplicative fundamentale, presupun de regula munca in echipa, in care, functie de natura importanta problemelor ce se ivesc se recomanda sa participe inginerul, fiziologul (sau medicul de medicina naturii), psihologul, economistul, sociologul, etc.
Datele obtinute in urma cercetarilor fundamentale in diverse domenii de activitate (prezentate sub forma de tabele, diagrame, standarde, etc.) sunt utilizate in proiectarea/corectarea ergonomica a unor situatii (conditii) de munca existente.
Existenta diferitelor ramuri ale ergonomiei (ergonomia informationala, topoergonomia, bioergonomia, ergonomia activitatilor, ergonomia aerospatiala, ergonomia urbanistica, ergonomia scolara, ergonomia recuperarii handicapatilor mentali fizici, ergonomia casnica) este dictat tocmai de diversitatea mare a situatiilor de munca in care ergonomia intervine.
In SUA, ergonomia a aparut ca disciplina dupa cel de-al Doilea Razboi Mondial. Aparusera multe probleme in folosirea echipamentelor sofisticate precum avioane, radare, sonare si tancuri. Uneori aceste probleme au cauzat erori umane cu consecinte grave. De exemplu, in timpul razboiului din Coreea, mai multi piloti au fost ucisi in timpul antrenamentelor decat in lupta (Nichols, 1976). Aceasta constatare a avut ca urmare cresterea interesului pentru crearea unor sisteme de control si afisaj in avioane. De aceea, informatiile disponibile in manuale despre factori umani sunt in mare parte influentate de aplicatiile militare in domeniul ergonomiei.
Unele agentii federale au sponsorizat cercetari ale aplicatiilor civile: Administratia Federala a Autostrazilor (design-ul autostrazilor si a indicatoarelor rutiere), NASA (capacitate si limitare umana in spatiu, design-ul statiilor spatiale), Administratia Nationala a Autostrazilor pentru Siguranta Traficului (design-ul masinilor, efectele drogurilor si a alcoolului in timpul condusului), Comisia Nucleara (planuri necesare pentru centrale nucleare), Administratia Federala a Aviatiei (siguranta aviatiei).
In SUA, aplicatiile in in domeniul civil sunt destul de recente. Eastman-Kodak in Rochester, New York, a fost probabil prima companie care a implementat un program substantial in jurul anului 1965. La IBM, interesul in ergonomie a inceput in jurul anului 1980. La acea vreme, IBM avea numerosi experti in domeniul factorilor umani, majoritatea lucrand insa la proiectarea produselor destinate consumatorilor. Recent, acestia si-au indreptat interesul spre calculatoare si programe.
In Europa, ergonomia este foarte bine implementata in special in Anglia, Franta, Germania, Olanda, Italia si tarile scandinave. In fosta URSS, la fel ca in SUA, interesul a fost concentrat pe activitatile Departamentului de Aparare. Au fost putine aplicatii in domeniul civil, dar interesul creste rapid.
Inca din Epoca de piatra omul a creat unelte necesare diferitelor operatii (Drillis, 1963). In timpul Revolutiei Industriale s-a incercat aplicarea unui concept prin care operatorul uman sa primeasca sarcini interesante si sa fie lasata masina sa execute operatiile repetitive (Rosenbrock, 1983). La inceputul secolului 20, Frederick Taylor a introdus studiul "stiintific" al muncii. Acesta a fost urmat de catre Frank si Lillian Gilbreth care au dezvoltat studiul timp-miscare si conceptul de a imparti munci obisnuite in microelemente numite "therbligs" (Konz, 1990).
Abia in anii '50 ergonomia a devenit o disciplina independenta. In Anglia, Societatea Dezvoltarii Ergonomice a fost infiintata in 1950. In SUA, Societatea Factorului Uman a fost infiintata in 1957. In 1961 a avut loc prima intalnire a Asociatiei Ergonomice Internationale tinuta la Stockholm, Suedia (Chapanis,1990). In prezent asociatia are aproximativ 15000 de ergonomisti din 40 de tari.
Ergonomia se practica atat in faza de proiectare si poarta numele de ergonomie de conceptie, cat si in faza de realizare a acestora - ergonomia de corectare.
Accentul trebuie, insa, pus pe aplicarea in faza de proiectare, corectarea ulterioara fiind mai costisitoare. Tot datorita faptului ca proiectantul nu dispune inca de suficiente date (ne referim la datele obtinute in urma cercetarilor ergonomice fundamentale) apar necesitati de corectare ergonomica ulterioare. Corectarea ergonomica se executa pe baza studiilor efectuate de echipa ergonomica (care urmareste de regula ansamblul activitatilor din punct de vedere economic, tehnic, social).
Privita din punct de vedere al obiectului preocuparilor, ergonomia poate capata doua forme: ergonomia aplicata la proiectarea produselor(mijloace de munca, bunuri de larg consum), cunoscuta sub denumirea de ergonomia produsului si ergonomia aplicata la proiectarea produselor de productie, cunoscuta sub denumirea de ergonomia productiei.
Ergonomia produsului urmareste ca produsului realizat sa ii fie conferite valente de ordin ergonomic, pe baza datelor obtinute in urma cercetarilor fundamentale, astfel ca aceste produse sa solicite omul in limita posibilitatilor sale normale, satisfacand in totalitate cerintele beneficiarului.
Precizarea nivelului ergonomic realizat al produsului se face cu ajutorul unui certificat ergonomic care insoteste produsul care poarta denumirea de atestat ergonomic.
Ergonomia productiei studiaza conditiile in care se desfasoara procesul de productie, complexul oameni - masini in dinamica lui. In tara noastra principiile ergonomice sunt precizate de normele generale de protectia muncii elaborate de Institutul de Cercetari Stiintifice pentru Protectia Muncii (I.C.S.P.M), in colaborare cu specialisti din cadrul M.M.P.S. si ai Institutului de Igiena Sanatate Publica, Serviciul de Sanatate si Conducere. Astfel principiile ergonomice in organizarea locului de munca sunt date de articolele 143,,153; principiile ergonomice de proiectare a echipamentelor tehnice sunt reglementate prin articolele 302, 303, 304, 305; sistemele de comanda prin articolele 306,,313; mediul de munca prin: (microclimat - articolele 403,,409; ventilare -
articolele 430,,452; iluminat - articolele 453,,473; zgomotul, vibratiile si ultrasunetele - articolele 474,,490; radiatiile electromagnetice neionizante - articolele 491,,531; factorii biologici - articolele 545,..,551), etc., conform standardelor nationale si europene.
La locul de munca apar adesea probleme care necesita o abordare detaliata. In ciuda diferentelor existente intre factori umani si ergonomie, cele doua stiinte interactioneaza din ce in ce mai bine. De exemplu introducerea calculatoarelor la locul de munca a scos la iveala existenta unor probleme de proiectare (tab. 1.1). Aceasta problema este prezentata ca atare in figura 1.2. Un operator uman primeste informatii pe un monitor urmand sa le interpreteze si sa selecteze operatia corespunzatoare.
Mediul inconjurator poate de asemenea sa afecteze operatorul uman. Cei mai importanti factori cu influenta negativa asupra performantelor sunt factorii externi, de exemplu zgomotul si vibratiile, frigul si caldura excesiva, ciclurile munca - odihna, factorii organizatorici.
Pentru a rezolva eficient o problema legata de statii de munca VDT (visual display terminals), ergonomistul trebuie sa fie capabil sa recunoasca si sa analizeze o varietate de probleme iar apoi sa propuna solutii. Aceasta ne conduce la prima maxima: scopul primar al ergonomiei este proiectarea.
Prin urmare, situatia trebuie intai analizata, trebuiesc generate solutii de proiectare dupa care si acestea trebuie analizate (fig. 1.3).
Tabelul 1.1 Probleme aparute datorita introducerii calculatoarelor la locul de munca
Problema Cunostinte necesare rezolvarii problemei
Postura Biomecanica
Tastarea Biomecanica
Marimea caracterelor monitorului Perceptie, cercetare vizuala
Afisarea informatiilor pe monitor Psihologie si stiinta cognitiva
Proiectarea sistemelor noi Proiectarea sistemelor si cibernetica
Factorii mediului Galagie, caldura, frig
Fig. 1.2 Analiza interfetei om-masina necesita cunostiinte interdisciplinare de bio-mecanica, psihologie cognitiva si de metodologie a proiectarii sistemelor
Fig. 1.3 Procedura de proiectare si reproiectare a unui sistem
Din figura 1.2 reiese ca
sunt necesare cunostinte interdisciplinare:
(1) formularea scopurilor sistemului; (2) intelegerea cerintelor
functionale; (3) proiectarea unui nou sistem; (4) analizarea sistemului
si (5) implementarea sistemului. Din schema prezentata in figura 1.3
reiese ca proiectarea este o activitate neintrerupta. Exista
intotdeauna oportunitati de imbunatatire si
modificare.
In reproiectarea unui sistem, ergonomistul trebuie sa ia in considerare multe constrangeri. Vor fi constrangeri legate de alocarea muncii (cine face ce), constrangeri economice, constrangeri ale companiei, si uneori chiar si constrangeri venite din partea sindicatelor muncitoresti. Ergonomistul trebuie sa obtina date de la cei ce vor utiliza sistemul sau de la un sistem similar. Va fi necesara consultarea literaturii de
specialitate, evaluarea mai multor variante de proiectare prin folosirea unor prototipuri sau prin experimente care au drept subiecte testate pe utilizatori. Acest scenariu conduce la cea de-a doua maxima: o abordare sistematica, interdisciplinara este necesara in proiectarea si analiza unui sistem.
Ergonomia trebuie sa aiba in vedere reducerea numarului mare de accidente precum si a sumelor mari platite pentru asigurare. In ultimii ani au existat numeroase accidentari datorate unor traume cumulative sau datorate unor factori psihologici, sociologici si etici. Operatorii se adapteaza adesea la conditiile improprii de munca, dar numarul de accidente creste si productivitatea scade.
Fig. 1. 4. Un sistem mediu de productie/operator. Sunt trei criterii pentru evaluare: ergonomia, productia si calitatea
Ergonomia este de asemenea legata de siguranta muncii. Daca operatorii pot percepe pericolele, daca exista semne de avertizare, daca dispozitivele de comanda sunt usor de folosit, daca postura de munca este acceptabila, daca zgomotul si alte elemente stresante ale mediului inconjurator sunt reduse, daca exista o buna cooperare intre acestia si conducere bazata pe o intelegere mutuala, si daca exista o buna administrare, atunci siguranta va creste. Masurile ergonomice privind siguranta sunt diferite de cele conventionale. Ergonomia poate controla siguranta in munca prin atitudinea operatorilor, perceptie, luarea deciziilor si comportamentul in situatii de risc.
Figura 1.4 prezinta
analiza sistemelor ergonomice prin: (1) perceptie,
(2) productie, (3) calitatea muncii.
In proiectarea oricarui sistem complex este necesara aplicarea mai multor criterii simultan. Nu poate fi acceptata o situatie de munca in care procesul de productie, ergonomia sau calitatea sunt sub standard. Toate criteriile trebuie sa fie la un nivel minim de acceptabilitate.
Ergonomia contribuie la
imbunatatirea aspectelor performantei sistemului. Nu
exista conflicte intre ergonomie si productivitate, creandu-se o
asa numita situatie
profit - profit.
Pentru asigurarea realizarii unui proces de munca la un nivel superior de organizare, este necesara o imbinare armonioasa a tuturor activitatilor desfasurate in compartimentele unitatilor. Datorita faptului ca locul de munca este cel mai mic compartiment productiv si ca procesul de munca se bazeaza in primul rand pe interdependenta care exista intre diversele locuri de munca, se poate face afirmatia ca el constituie "veriga de baza a oricarui proces de munca". Pe fiecare loc de munca se executa anumite operatii de munca la care participa forta de munca, mijloacele de munca si obiectele muncii.
Forta de munca, in calitate de subiect al sistemului, - respectiv omului - initiaza actiunea sistemului, executa o serie de activitati, conduce, supravegheaza, corecteaza etc.
Obiectul sistemului reprezinta gama de materii prime, materiale semifabricate, etc., ca si stocul de informatii pe care omul le transforma la un moment dat, in functie de scopurile propuse. Mijloacele sistemului, materializate in diverse forme: tehnice, tehnologice, constructive, etc., determinate de evolutia tehnico - stiintifica, influenteaza direct modul in care omul actioneaza pentru atingerea scopurilor propuse, respectiv realizarea sarcinilor de munca.
Elementele sistemului se interconditioneaza reciproc si permanent stabilind scopul sistemului. (fig. 1.5).
Antropometria este stiinta care se ocupa cu stabilirea exacta a dimensiunilor umane, in functie de rasa, sex sau varsta. Ergonomia este strins legata de cunostintele oferite de medicina si psihologie si poate fi definita ca disciplina adaptarii muncii la om, avind ca obiect rationalizarea efortului la locul de munca .
Antropometria tehnica, urmareste sa raspunda cerintei ca oamenii sa fie capabili sa lucreze la orice masina, respectiv ca dimensiunile lor sa fie integrate in dimensiunile masinii, conferindu-i acesteia un caracter de operabilitate universala, iar prin detaliile de proiectare sa asigure adaptarea masinii la om.
Principiile generale de aplicare a antropometriei in activitatea de proiectare pot fi sistematizate astfel:
trasaturile dimensionale si functionale ale omului trebuie avute in vedere inca din prima faza a elaborarii oricarui proiect, luarea lor in consideratie intr-o etapa urmatoare poate fi tardiva si de multe ori ineficienta;
operatorul trebuie studiat in contextul activitatii pe care o desfasoara, in relatia om - mijloc de munca si de aceea, pe langa dimensiunile antropometice statice, trebuie avute in vedere si dimensiunile dinamice, atat la proiectarea locului de munca, cat si la conceperea si amplasarea mijloacelor de munca, a dispozitivelor de actionare etc.;
trebuie sa se tina seama de factori de variabilitate dimensionala a omului si de conditiile de organizare a productiei si a muncii;
sa se asigure tolerante spatiale pentru oameni si echipamente, avand in vedere eventualele conditii specifice in care sa se poata desfasura munca.

Fig.2.1. Numerotarea diferitelor dimensiuni ale corpului omenesc - pozitia
in picioare
Cu toate avantajele prezentate de utilizarea calculatoarelor in proiectarea ergonomica, totusi si in prezent se folosesc cu precadere "tabelele de date antropometrice" privind dimensiunile globale si partiale ale corpului uman.
Prin sistemul om - mijloace de munca se intelege ansamblul format din componenta umana (omul) si componenta fizica. Aceste doua elemente sunt in interactiune si urmaresc un scop comun si anume realizarea unei operatii de munca. Caracteristicile principale ale oricarui sistem sunt intrarile si iesirile, care in cadrul sistemului specific analizat imbraca forme particulare .
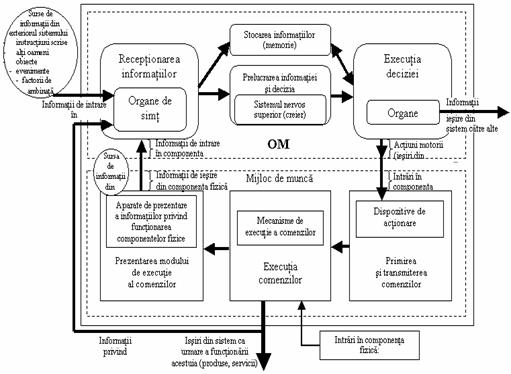
Fig.2.2. Schema bloc privind functiile indeplinite in cadrul
sistemului om-mijloc de munca
Pentru om, intrarile din exteriorul sistemului si cele din interiorul lui sunt informatiile adresate organelor de simt.
Iesirile din sistem sunt concretizate prin produsele prelucrate pe mijlocul de munca sau anumite informatii date de componenta umana a altor sisteme.
Pentru "om" functiile de baza sunt: receptionarea informatiilor; stocarea informatiilor; prelucrarea informatiilor si decizia; executia deciziei.
Pentru mijlocul de munca ce functioneaza in regim manual sau semiautomat functiile de baza se refera la modul de executie a comenzilor si depind de solutiile ingineresti adoptate de proiectant. Aceste functii sunt: receptionarea si transmiterea comenzilor; executia comenzilor; prezentarea modulului de executie a comenzilor.
Functiile indeplinite de om:
Receptionarea informatiilor se face de catre "om" cu ajutorul organelor de simt.
Stocarea informatiilor este functia care realizeaza fixarea in memorie a informat 444b15e iilor primite si se realizeaza la nivelul sistemului nervos superior (creier).
Prelucrarea informatiilor si decizia este functia cea mai importanta, ea asigurand coordonarea functionarii sistemului pentru ca acesta sa-si indeplineasca scopul pentru care a fost creat.
Executia deciziei reprezinta acte motorii efectuate cu ajutorul membrelor superioare sau inferioare si / sau actiuni de comunicatii verbale.
Functiile indeplinite la locul de munca
Primirea si transmiterea comenzilor. Mijlocul de munca este manevrat de catre om cu ajutorul dispozitivelor de actionare (leviere, pedale, butoane etc.) care primesc comenzile ca urmare a deciziei luate de catre componenta umana si le transmite mecanismelor interne ale componentei fizice.
Executia comenzilor primite se realizeaza de catre mecanismele interne ale mijlocului de munca si poate fi asimilata functiei de "executie a deciziei" a componentei umane.
Prezentarea modulului de executie a comenzilor este functia indeplinita de mijlocul de munca pentru ca "omul" sa cunoasca in permanenta modul cum se executa comenzile controland astfel modul de functionare a sistemului. Aceasta functie se realizeaza prin intermediul diverselor aparate de masura si control.
Filozofia de baza a ergonomiei este
de a proiecta locuri de munca confortabile, convenabile si productive.
Ideal ar fi ca locurile de munca sa fie proiectate in asa fel
incat sa se potriveasca atat cu mintea, cat si cu corpul utilizatorului. Antropometria nu se
ocupa numai cu inaltimea adecvata pentru utilizare, dar
si cu accesul usor al operatorului la comenzi si la aparate.
Masurile antropometrice sunt exprimate in mod obisnuit in procente.
Cele mai utilizate sunt a 5-a, a 50-a
si a 95-a masura procentuala .Informatia antropometrica
este in mod normal distribuita (fig. 6.3).
O distributie normala e caracterizata prin valoarea sa si
prin deviatia sa standard (SD). Atata timp cat cunoastem aceste
valori ale distributiei, putem calcula orice valoare procentuala.
Tabelul 2.1 Explicatia masuratorilor procentuale
Procentul Descriere
5% din populatie este mai scunda
Valoare medie
95% din populatie este mai inalta
Cu cat aria de proiectare e mai mare cu atat costurile sunt mai mari. Este mult mai scump sa proiectezi intre aria procentuala 5 pana la 95, decat intre 10 si 90. Valoarea procentuala aleasa este in mare parte o decizie politica, iar companiile pot adopta diferite strategii. Masurile antropometrice pot fi transmise in proiectarea locului de munca folosind motto-ul proiectarii antropometrice:
permiteti persoanei scunde sa ajunga
permiteti persoanei inalte sa incapa
Aceste principii sugereaza ca distantele pana la comenzi ar trebui sa fie proiectate atat pentru persoanele scunde, care reprezinta procentul 5, dar sa fie si spatioase pentru persoanele care reprezinta procentul 95.
Pentru oameni care impart un loc de munca, de exemplu lucratorii in schimburi, adaptabilitatea devine esentiala.
Cea mai completa sursa de masuri antropometrice a fost publicata de NASA in 1978. Aceasta publicatie de referinta contine masuratori a peste 306 dimensiuni diferite ale corpului din 91 de populatii diferite din intreaga lume. Masurile reprezentate in tabelul 2.4 si figura 2.4 sunt:
Inaltimea tibiala - obiectele utilizate intre inaltimea tibiala si inaltimea incheieturii mainii trebuie ridicate in mod obisnuit dintr-o pozitie aplecata.
Inaltimea incheieturii mainii - cel mai jos nivel la care un operator poate utiliza un obiect fara sa fie nevoie sa indoaie genunchii sau spatele. Diferenta dintre inaltimea incheieturii si inaltimea umarului este ideala in operare.
Inaltimea cotului. Este un indicator important pentru determinarea inaltimii de lucru si a inaltimii mesei.
Inaltimea umarului (acromion). Obiectele localizate deasupra inaltimii umarului sunt dificil de ridicat, deoarece sunt folositi muschi relativ slabi. Exista de asemenea si un risc crescut al scaparii unor obiecte.
Statura. Aceasta este folosita pentru a determina spatiul minim necesar evitarii unor lovituri cu capul.
Raza functionala de actiune de deasupra capului. Aceasta e folosita pentru a determina inaltimea maxima a comenzilor de deasupra capului.
Raza functionala de actiune spre inainte. Obiecte care sunt folosite des in cadrul locului de munca ar trebui sa fie localizate in perimetrul acestei raze.
Adancimea coapsei. Aceasta defineste adancimea scaunului si inaltimea spatiului de sub masa de lucru.
Adancimea zonei feso-popliteale. Este folosita pentru a determina lungimea sezutului scaunului.
Inaltimea popliteala. Este folosita pentru a determina raza de ajustabilitate la scaunele reglabile.
Spatiul necesar coapsei. Aceasta masura, impreuna cu inaltimea cotului in pozitie sezand a corpului, definesc grosimea tabliei mesei si grosimea maxima a sertarului superior.
Inaltimea cotului in pozitie sezand a corpului. Este folosita impreuna cu masuratoarea precedenta pentru a defini inaltimea mesei.
Inaltimea ochilor in pozitie sezand a corpului. Ecranele ar trebui sa fie localizate sub planul orizontal definit de aceasta.
Inaltimea in pozitia sezand a corpului. Este folosita pentru a determina spatiul vertical necesar unei pozitii de lucru normale.
Latimea soldului. Este folosita pentru a determina latimea scaunelor si spatiul necesar miscarilor corpului.
Latimea dintre cele 2 coate. Este folosita pentru a determina latimea spatarelor si distanta dintre cotiere.
Latimea necesara miscarii de apucare si diametrul interior. Este folosita pentru a determina circumferinta uneltelor si separarea manetelor.
Distanta interpupilara. Este o masura importanta in determinarea ajustabilitatii aparatelor.
Tabelul 2.2 - dimensiunile corpului civililor (in cm fara pantofi; pentru corectare adaugati 3 cm)
|
|
Femei |
Barbati |
|||||
|
|
|
|
|
|
|
||
|
Stand |
|
|
|
|
|
|
|
|
|
Inaltimea tibiala |
|
|
|
|
|
|
|
|
Inaltimea incheieturii mainii |
|
|
|
|
|
|
|
|
Inaltimea cotului |
|
|
|
|
|
|
|
|
Inaltimea umarului (acromion) |
|
|
|
|
|
|
|
|
Statura |
|
|
|
|
|
|
|
|
Raza functionala de actiune de deasupra capului |
|
|
|
|
|
|
|
Sezand |
|
|
|
|
|
|
|
|
|
Raza functionala de actiune spre inainte |
|
|
|
|
|
|
|
|
Adancimea coapsei |
|
|
|
|
|
|
|
|
Adancimea zonei feso-popliteale |
|
|
|
|
|
|
|
|
Inaltimea popliteala |
|
|
|
|
|
|
|
|
Spatiul necesar coapsei |
|
|
|
|
|
|
|
|
Inaltimea cotului |
|
|
|
|
|
|
|
|
Inaltimea ochilor in pozitie sezand a corpului |
|
|
|
|
|
|
|
|
Inaltimea in pozitia sezand a corpului |
|
|
|
|
|
|
|
|
Latimea soldului |
|
|
|
|
|
|
|
|
Latimea dintre cele 2 coate |
|
|
|
|
|
|
|
Alte dimensiuni |
|
|
|
|
|
|
|
|
|
Latimea necesara miscarii de apucare si diametrul interior |
|
|
|
|
|
|
|
|
Distanta interpupilara |
|
|
|
|
|
|
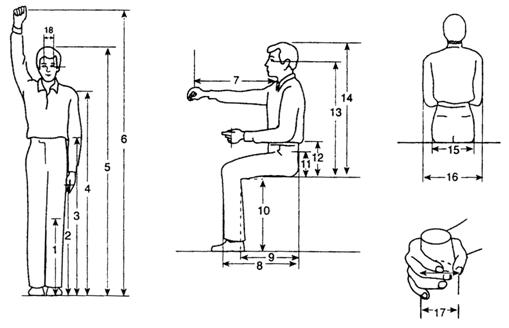
Fig. 2.3 Ilustrarea masuratorilor antropometrice din tabelul 6.4.
Pentru a reduce erorile de masurare, masurile antropometrice sunt efectuate asupra unor persoane imbracate cat mai sumar, care stau pe scaun sau in picioare. Angajatii sunt, totusi, uzual imbracati si stau intr-o pozitie mai relaxata.
Luand in considerare incaltamintea, masuratorile din tabelul 6.4 trebuiesc marite cu aproximativ 3 cm.
Masurile antropometrice sunt bine definite si exista procedee standard pentru efectuarea lor. De asemenea exista si unelte si echipamente speciale pentru efectuarea masurarilor.
In trecut, majoritatea cercetarilor si studiilor antropometrice au fost initiate de U.S. Air Force, care in prezent dezvolta programe pentru modelarea tri-dimensionala folosind design computerizat: CAR (Crew station Assessment of Reach), SAMMIE (System for Aiding Man - Machine Interaction Evaluation), COMBIMAN (Computerised Biomechanical Man - Model), CREWCHIEF si ADAM si EVE.
Depinzand de aplicatie, masura antropometrica este folosita diferit (fig. 2.4).
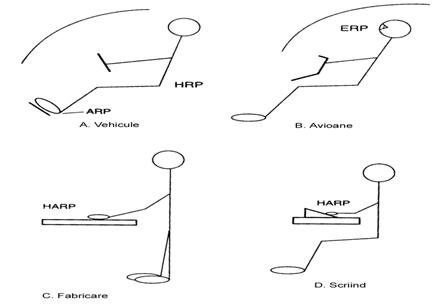
Fig. 2.4 Proiectarea antropometrica poate folosi diferite puncte de referinta
Pozitia ideala a mainilor depinde de operatia ce trebuie executata. Pentru munci grele, preferabil ar fi ca mainile sa fie la 20 cm sub nivelul coatelor, dar pentru munci de precizie cu suport pentru antebrate, mainile ar trebui sa fie la 5 cm peste nivelul coatelor. De aceea, pentru proiectarea unui loc de munca trebuie intai determinata inaltimea cea mai convenabila a mainilor pentru operatia ce va fi efectuata. Dupa aceea se incearca si gasirea unor pozitii cat mai convenabile pentru restul corpului.
Descrieti utilizatorii. Ce informatii antropometrice sunt disponibile? Pot datele antropometrice fi folosite pentru actualii operatori? Daca nu sunt disponibile date valide, luati in considerarea posibilitatea crearii unei baze de date actualizate.
Determinati raza procentuala pentru a fi implementata in proiectarea statiilor de lucru. Daca forta de munca este preponderent masculina sau feminina, este logica proiectarea pentru sexul dominant, de exemplu prin folosirea procentajelor 5 - 95 masculine sau 5 - 95 feminine. Optim ar fi accesibilitatea pentru ambele sexe.
Lasa-i pe cei scunzi sa ajunga, pe cei inalti sa incapa. Determinati dimensiunile "de ajuns" (procentajul 5) si dimensiunile "de incaput" (procentajul 95) pentru situatia de munca analizata. Un exemplu este dat in figura 2.5.
Gasiti masurile antropometrice corespondente masurilor pupitrului de lucru. Calculele pentru procentajul 5 feminin si 95 masculin sunt prezentate in figura 6.6. Masurile antropometrice sunt adaugate incepand cu nivelul podelei. Prin utilizarea inaltimii popliteale si adaugand 4 cm pentru pantofi, distanta necesara ajustabilitatii inaltimii sezutului este calculata ca fiind de 39,5 - 52,5 cm. Inaltimea cotului in stare de repaus pentru operatori apartinand procentajului 5 este de 18,1 cm si pentru cei din procentajul 95 este de 29,4 cm. De la inaltimea coatelor in stare de repaus deduceti grosimea produsului (6 cm).
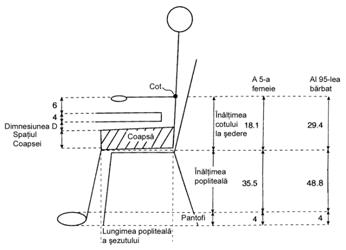
Fig. 2.5 Masuratori antropometrice folosite pentru calcularea potrivirii
inaltimii scaunului si a mesei
Aceasta inseamna ca distanta de la sezutul scaunului la masa este de 12,1 cm pentru procentajul 5 si de 23,4 cm pentru procentajul 95. Adaugand aceste masuratori la ajustabilitatea inaltimii sezutului se obtine o ajustabilitatea a inaltimii mesei de 51,6 - 75,9 cm (sau 52 - 76 cm). Stiind grosimea cantului mesei, se deduce ca pentru procentajul 5 sunt 8,1 cm intre sezutul scaunului si masa iar pentru procentajul 95 sunt 19,4 cm.
Uneori este dificil de ilustrat o situatie de munca folosind un model antropometric. Masuratorile antropometrice sunt statice, iar in realitate apar multe elemente dinamice. Operatorii se intind dupa instrumente si piese balansandu-se astfel in scaun. Pentru a evalua corespunzator aspectele dinamice ale unei statii de lucru, se creeaza modele la scara reala din carton sau polistiren, testate prin simularea diverselor activitati. Prin modelul la scara reala este posibila identificarea unor aspecte ale statiei de lucru care vor trebui reproiectate.
Antromometria aplicata ar putea fi cea mai veche componenta de analiza a factorilor umani. Cercetatorii de la Biosciences Division se concentreaza pe abordari functionale, care sa dezvolte modele de predictie empirice ale omului de a rezolva probleme de inginerie.Our research characterizes the size, shape, and posture of vehicle occupants, both adults and children, but we've also applied these methods in other domains. More Cercetarile lor se axeaza pe dimensiuni, forme, si postura ocupantilor vehiculului, adulti si copii, cu anumite metode, pe care le-au aplicat de asemenea, si in alte domenii.
Sau facut mai multe cercetari in privinta unui mare segment (in cerstere) al popultiei (exemplul din S.U.A) privind obezitatea, cercetarile lor ofera o excelenta imagine de ansamblu a tendintei a staturii mijlocii si a celor mai robusti in SUA incepand din anii 1960. O consecinta majora pentru ingineria antopometrica este produs de urmatorul factor: dimensiunile ce afecteaza masa corporala ,ceea ce a dus la cercetarea in detaliu a acestui lucru.

Fig 2.6 Imagine 3D realizatacu programul Ramsis, subiecti in ocuparea spatiului soferului
Cei de la Biosciences Divisions au facut studii atat in laborator cit si in vehicule. Un exemplu tipic de laborator utilizeaza ca studiu un vehicul partial, adesea doar un loc, pedale si volan. In functie de obiectivele de studiu, s-ar putea folosi diferite locuri sau de a schimba volanul pe masura ce cuantifica efectele lor asupra posturi in care se afla persoanele
O componenta importanta a ergonomiei in cercetarea celor de la Biosciences Divisions este dezvoltarea unor modele de pozitionare pentru ocupantii vehiculului. Obiectivul este de a estima pozitiile in care oamenii vor putea alege , functie de descriptorii ocupantului (sex, statura, greutate ) si de asemenea geometria vehiculului (pozitia volanului, inaltimea scaunului, unghiurile dorite , vizibilitatea in anumite puncte). Aplicarea acestor modele digitale este in legatura cu modelele umane, fiind o imagine tridimensionala a corpului uman.. Principalul model foloseste o serie de functii de regresie , scheme cinematice pentru a anticipa postura intregului corp. Avantajul acestui tip de abordare este acela de a oferii o precizie ridicata pentru design-ul interior, de obicei, soldul(comfort sporit) si vizibilitatea (usurinta de a observa detalii dintr-o pozitie adecvata) in vederea modelarii intregului sistem, pentru spatiul soferului,indiferent daca este masina de dimensiuni mai mici,sau chiar cabina unui camion .
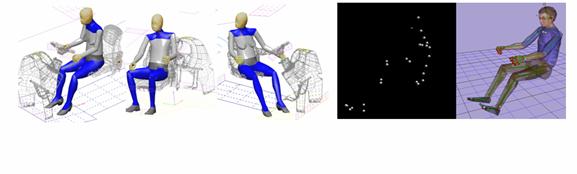
Fig 2.7 Modele tri-dimensionala realizate cu progrmaul RAMSIS
Forta aplicata de diferitele membre ale corpului omenesc
In multe cazuri membrele superioare si inferioare nu aplica singure forta necesara executarii unei actiuni. Aceste forte sunt aplicate de catre membrele respective impreuna cu alte parti ale corpului. Exista foarte multe combinatii ale actiunii mainilor si picioarelor cu greutatea corpului. De exemplu, in tragerea sau impingerea unui levier se poate folosi integral greutatea corpului.
In cazul unor astfel de combinatii este evident ca membrele nu actioneaza singure. Miscarea intregului corp (aplecarea, rasucirea trunchiului etc.) nu este insa recomandabila din punct de vedere al economiei miscarilor. Din acest motiv, in constructia echipamentului tehnic si organizarea locului de munca este bine sa se ia in considerare numai miscarile membrelor si pe cat posibil, cele expuse mai sus cu privire la economia miscarilor. In plus, se recomanda ca in aplicarea fortelor de catre maini, in sensul impingerii unui levier, din pozitia asezat, sa existe un spatar adecvat, la fel si pentru impinsul cu piciorul, iar pentru trasul cu mana sa existe o rezematoare de picioare.
Fortele aplicate de catre membrele superioare si inferioare depind de mai multi factori:
pozitia corpului;
inaltimea la care se exercita;
directia si distanta miscarii;
unghiurile de flexie;
membrele superioare sau inferioare;
membrul care actioneaza (drept, stang);
durata de actiune;
sex;
varsta etc.
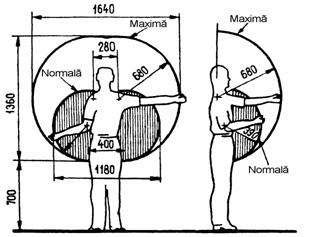
Fig.2.8 Zona normala de lucru pentru maini in pozitia de lucru in picioare
Asa de exemplu, forta maxima de impingere sau tragere poate fi obtinuta numai pe o distanta foarte scurta, de cca. 7,62 cm. si la inaltimea umarului. Apasarea maxima cu piciorul pe o pedala se poate obtine atat prin folosirea calcaiului, cat si a varfului piciorului. Dar in ultimul caz, forta scade imediat cu o treime deoarece muschii piciorului sunt incapabili sa reziste efortului. De asemenea, s-a constatat ca forta maxima a omului este in jurul varstei de 25 de ani. La barbati de 60 de ani forta scade cu 15% fata de barbatul de 25 de ani.
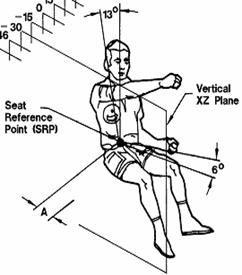
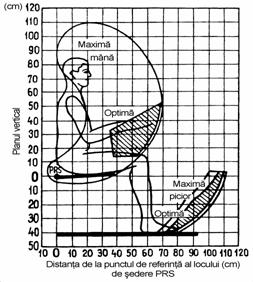
Fig. 2.9. Zona optima si maxima de actionare a picioarelor in plan vertical
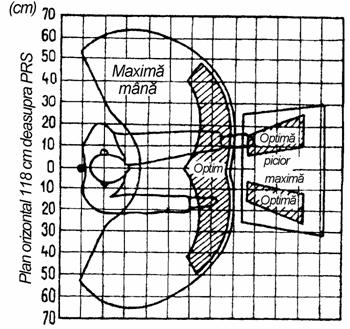
Fig. 2.10 Zona optima si maxima de actionare a picioarelor in plan orizontal


Fig 2.11 Imagini 3D realizate cu RAMSIS(www.human-solution.com)
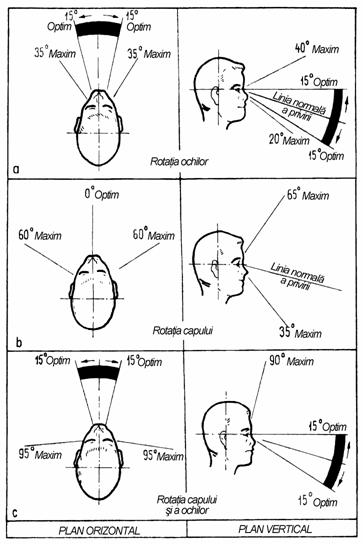
Fig.2.12 Unghiurile optime si maxime de rotatie a ochilor si a capului in
plan vertical si plan orizontal:
a - rotatia ochilor; b - rotatia capului; c - rotatia capului si a ochilor

Fig 2.13
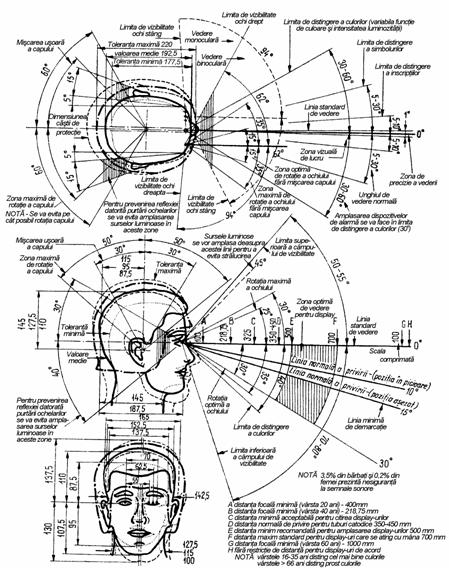
Fig.2.14. Dimensiunile campului vizual

A B
Fig 2.15 Pozitionarea scaunului, pentru o mai buna vizibilitate, B- pozitionarea tetierei, pentru sprijinul capului
Aceeasi importanta o are si stabilirea ariilor de vedere. Acestea sunt date de unghiurile vizuale maxime si optime. In functie de zonele respective se precizeaza amplasarea dispozitivelor informative (aparate de masura) si posibilitatile de control vizual ale miscarilor mainilor. Aceste zone sunt date in figurile de mai sus.
Precizia si viteza miscarilor.
Precizia de miscare a diferitelor membre este influentata de o serie de factori;
a) Membrele superioare si inferioare. Miscarile piciorului sunt mai putin precise decat cele ale mainii. In operatiile de productie care cer miscari precise, fine, se va folosi mana, iar pentru picior se vor repartiza actiuni grosiere cu scopul de a evita supraincarcarea membrelor superioare.
b) Mana dreapta si mana stanga. Mana dreapta executa miscari mult mai precise decat mana stanga, lucrul care este insa valabil pentru "dreptari". Deoarece "dreptarii" constituie populatia cea mai numeroasa, dispozitivele de comanda care cer o precizie mai mare de actionare vor fi amplasate in locuri corespunzatoare mainii drepte.
c) Nivelul mainii care executa miscarea. Planul muncii sau dispozitivele de comanda si reglare amplasate la inaltimea cotului asigura o precizie mai mare miscarii mainilor.
d) Distanta de corp. Miscarile executate aproape de corp sunt mai precise. Precizia scade in raport cu distanta de la corp.
e) Manipularea ceruta la sfarsitul miscarii. Se presupune ca in orice actionare mana pleaca de la o anumita pozitie si ca sarcina utila se efectueaza la sfarsitul miscarii. De exemplu, apucarea unui obiect, actiunile de pozitionare etc. Atunci cand mana muta un obiect dintr-o pozitie in alta, indiferent de locul de asezare a obiectului, cerintele fata de precizia miscarii nu sunt mari. In cazul miscarilor de pozitionare, precizia apare pe primul plan. Si in acest tip de miscare precizia poate sa nu fie ceruta daca exista un limitator de cursa, un opritor mecanic.
f) Controlul miscarii. Miscarile controlate vizual sunt mult mai precise. In unele profesii si locuri de munca, operatorul trebuie sa execute miscari de manipulare sau pozitionare "oarba", fara control vizual. In aceste conditii, precizia miscarilor de pozitionare este in functie de directia miscarii
Viteza miscarilor este si ea influentata de o serie de factori. Diferentele in viteza miscarilor in functie de sex, mana sau piciorul care actioneaza sunt date in tabelul nr. 2.3.
Tab. 2.3 cuprinde media timpului de reactie (in milisecunde) in
raport cu membrele care actioneaza si sex.
|
Membru |
Barbati |
Femei |
|
Mana dreapta |
|
|
|
Mana stanga |
|
|
|
Piciorul drept |
|
|
|
Piciorul stang |
|
|
In functie de alti factori, viteza este mai mare:
in directia "spre corp";
in plan vertical decat in plan orizontal si in directia sus-jos fata de directia inversa;
in directia "inainte-inapoi" in comparatie cu cea laterala;
de la stanga la dreapta ( pentru mana dreapta);
in miscarea de rotatie decat cea in trepte.
Influenta varstei asupra preciziei de miscare rezulta din fig. 6.27.
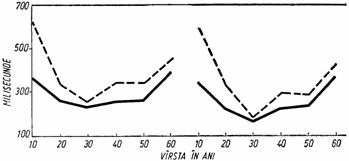
Fig. 2.16 - Schimbarea timpului initial de reactie la semnale vizuale
si auditive in functie de varsta.
Timpul necesar unei miscari de pozitionare sau unei miscari continue nu este proportional cu distanta miscarii.
1. Numarul obiectelor atinse cu mana sa fie minim. Se reduce numarul instrumentelor, numarul componentelor diferite, si numarul comenzilor. Numarul componentelor si al instrumentelor necesare depinde de procesul de munca. Proiectantii produselor trebuie sa inteleaga implicatiile proiectelor lor asupra muncii manuale. De ce sa se utilizeze cinci suruburi diferite, cand sunt de ajuns doua?
2. Aranjarea elementelor in asa fel incat operatorul sa-si poata ajusta pozitia in mod frecvent. De multe ori pozitia obiectelor pune operatorul intr-o pozitie de lucru imposibila sau incomoda.
3. Luarea in considerare a preferintelor de miscare a mainii. Oamenii isi pot misca mainile mai bine in plan orizontal dea lungul unui arc decat pe orizontala sau verticala. (fig. 2.17).
Este foarte important acest lucru mai ales in proiectarea instrumentelor, utilizate in sarcini care necesita indemanare si dexteritate, si pentru persoanele stangace.
4. Organizarea obiectelor in cadrul spatiilor de lucru.
(a) Se face diferenta intre obiectele principale si secundare. Cele care se utilizeaza frecvent, si cele care nu se utilizeaza frecvent. Trebuiesc listate si clasificate obiectele in principale/secundare.
(b) Se divide activitatea in subactivitati printr-o secventa logica. Se aplica activitatilor complexe.
(c) Se divide masa de lucru pe zone corespunzatoare subactivitatilor cu obiectele corespunzatoare operatiei subactivitatii.
(d) Se identifica zonele de manipulare primare si secundare ale mesei de lucru (fig. 2.17); se dispun obiectele principale in prima zona, iar cele secundare in cea de-a doua.
(e) Se localizeaza obiectele cum ar fi containere si instrumente astfel incat sa poata fi utilizate secvential pe subactivitati; ordinea procedurala ajuta in organizarea activitatii si faciliteaza "invatarea" activitatii si productivitatea.
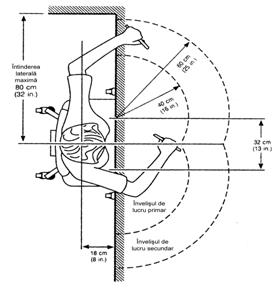
Fig. 2.17. Aranjarea unei statii de lucru si
prezentarea "invelisului" primar si secundar de miscare
Localizarea componentelor, instrumentelor si elementelor de actionare/control dupa importanta (principale/secundare) conduce la o buna organizare a activitatii.
Capacitatea de munca poate fi inteleasa ca totalitatea posibilitatilor omului, (fizice, psihice, cerebrale) de a efectua o cantitate maxima de munca.
In termeni generali, in munca propriu - zisa omul consuma o parte insemnata din capacitatea sa de munca, materializata in productia obtinuta sub diverse forme de manifestare.
O cerinta importanta in proiectarea ergonomica a muncii o constituie cunoasterea posibilitatilor, limitelor, variatia performantelor si capacitatilor in functie de structura anatomo - functionala a organismului uman, de factorii de influenta si de specificul activitatii in care este utilizata.
In general, capacitatea de munca se manifesta prin trei forme:
potentiala: - totalizeaza resursele umane conditionate de rezervele de energie ale organismului de anumiti factori psihologici;
functionala: - utilizata efectiv in procesul muncii;
de rezerva: - utilizata in scopul indeplinirii obligatiilor sociale, familiale, culturale,
Capacitatea de munca potentiala este influentata de anumite "stari psihologice" in care "vointa", "dispozitia de munca", au un rol dominant. Acesti factori sunt in mare masura dependenti de tonusul general al organismului influentat in mod complex de sistemul nervos central, de sistemul neurosugestiv, hormonal, ca si de nivelul constiintei sociale a individului.
"Componenta" capacitatii totale de munca contine:
zona A - protejata autonom, la care organismul face apel instinctiv cand existenta sa este amenintata;
zona B - la care organismul intervine cand este nevoie de o activitate suplimentara;
zona C - capacitatea potentiala din care se alimenteaza energia consumata pentru activitatea zilnica profesionala;
zona D - in care activitatea se desfasoara automat.
Activitatea profesionala asigura nivelul functional al intregului organism si din acest punct de vedere capacitatea de munca, privita in sens biologic, se manifesta ca una din trasaturile importante ale omului de adaptare la cerintele vietii in permanenta evolutie.
In functie de nivelul de preponderenta al solicitarilor, de caracteristicile acestora, deosebim: capacitatea de munca cu efort fizic preponderent, capacitatea de munca preponderent intelectuala.
Factorii care conditioneaza capacitatea de munca se pot grupa in:
factori biofiziologici,
factori psihologici,
factori sociali - economici si tehnologici,
Dintre factorii biofiziologici un rol important au:
starea de sanatate,
alimentarea,
varsta si sexul,
constitutia morfofunctionala.
Factorii psihologici conditioneaza capacitatea de munca sub raportul personalitatii omului - aptitudini, temperament si caracter, precum si a motivatiei pentru munca, exprimata prin atitudinea fata de munca.
Aptitudinile - ca latura a personalitatii reprezinta insusiri individuale ale omului care conditioneaza executia corespunzatoare a diferitelor activitati.
Vointa - deprinderile sunt dependente in mare masura de vointa omului care se manifesta prin declansarea, modificarea si incheierea desfasurarii activitatii in functie de obiectivele propuse.
Temperamentul - ca latura energetica a personalitatii intereseaza ergonomia in ce priceste aspectele fiziologice care il exprima, al dinamicii activitatilor nervoase superioare.
Interesul sau motivatia - ca totalitate a resorturilor interne ale conduitei, are o functie importanta de activare precum si una de directionare a activitatii omului.
Atitudinea fata de munca - este dependenta de nivelul de constiinta bazata pe convingerea ca munca este o necesitate a omului fata de care acesta trebuie sa aiba o atitudine constructiva, sa o efectueze cu devotiune si constiintiozitate, cunoscand ca efectul muncii sale contribuie la realizarea bunei stari individuale/sociale.
Factorii social-economici si tehnologici - conditioneaza capacitatea de munca actionand din exterior, spre deosebire de ceilalti factori biofiziologici si psihologici care sunt intriseci omului.
Mijloacele de munca - au drept scop sa sporeasca randamentul omului, sa-i mareasca sfera de actiune in ce priveste munca fizica si intelectuala.
Regimul de munca - presupune in primul rand folosirea integrala si eficienta a timpului de munca, valorificarea la un randament ridicat a capacitatii de munca in timpul afectat. In acest context trebuie avuta in vedere alternarea efortului si a odihnei ca o cerinta a mentinerii si promovarii capacitatii de munca.
Nivelul pregatirii profesionale si orizontul cultural - asigura permeabilitatea fata de conceptele teoretice si aplicative ale ergonomiei ca premise necesare obtinerii eficientei scontate.
Organizarea muncii - avand ca scop rationalizarea metodei de munca, intarirea disciplinei fata de programul de munca.
Mediul fizic de munca - respectiv asigurarea cerintelor ergonomice in ceea ce priveste iluminatul, cromatica, vibratiile, microclimatul, nivelul noxelor, care influenteaza nivelul capacitatii de munca.
Ca sa traiasca, sa se miste, sa munceasca, organismul uman trebuie sa aiba energie disponibila.
In termeni simpli, corpul uman actioneaza ca un "motor", producand si oferind energie sistemului locomotor.
"Motorul" uman este reprezentat de sistemul muscular, format dintr-o multime de muschi. Proprietatea cea mai importanta a tesutului muscular este contractibilitatea, adica capacitatea de a dezvolta o forta interioara ce conduce la scurtarea fibrei, ca urmare a unei excitatii din mediul exterior. Exista doua tipuri de contractare musculara: insotita de scurtarea muschiului (izotomica) sau neinsotita de scurtare(izometrica).
Capacitatea de efort a muschiului se manifesta in doua moduri: static si dinamic, dupa cum avem de-a face cu contractii izometrice sau izotomice.
Efortul dinamic, in care contractia musculara este insotita de o scurtare a acestuia, este caracterizat printr-o succesiune de contradictii si relaxari, in timp ce efortul static este caracterizat printr-o contractie fara scurtare a musculaturii. Intr-o contractie dinamica apare un lucru mecanic extern care poate fi masurat, cu o oarecare aproximatie, prin produsul dintre greutatea manipulata si miscarea acesteia. In cazul efortului static, nu mai apare un lucru mecanic extern si nu putem defini efortul in termeni de deplasare a fortei. Efortul static are anumite particularitati fiziologice, legate in primul rand de circulatia sangelui in muschi. In efortul dinamic asupra vaselor de sange care strabat muschii se exercita o alternanta de compresii si relaxari ritmice care imping sangele in directia fluxului sau normal il aspira din amonte. Aceste compresii si relaxari ritmice au un efect foarte favorabil asupra circulatiei, in special a celei venoase, ajungandu-se la cresteri de 10-20 ori a irigatiei musculare. Aceasta crestere a irigatiei inseamna atat un aport crescut de oxigen si substante nutritive, care joaca rolul de combustibil muscular, cat si o eliminare rapida si totala a deseurilor datorate activitatii musculare. Ne gasim deci intr-o situatie de functionalitate optima, de mare randament.
In efortul static in schimb, compresia permanenta asupra vaselor jeneaza fluxul de sange, deci aprovizionarea cu oxigen si substante nutritive si eliminarea deseurilor sunt blocate. Efectul este instalarea rapida a durerilor musculare si a oboselii. In timp ce efortul dinamic poate fi prestat mult timp fara aparitia oboselii, cel static conduce rapid la oboseala.
Trebuie mentionat faptul ca in timpul efortului static irigatia sanguina scade proportional cu forta contractiei musculare. In momentul in care muschiul se contracta cu 60% din forta sa maxima irigatia este practic intrerupta, tesuturile respective fiind in stare de asfixie. Numai o contractie statica de 15-20% din forta maxima musculara permite o irigatie normala.
Consumul energetic poate fi apreciat in Kcal/min. Fara a cuprinde metabolismul bazal;
munca in pozitia sezand: sub 2 Kcal/min;
munca usoara in ortostatism: 1 - 3 Kcal/min;
munca medie in ortostatism: 3 - 6 Kcal/min;
munca grea in ortostatism: 6 - 11 Kcal/min;
Metabolismul bazal al unui adult se ridica la circa 1700 Kcal/24 ore si se refera la energia necesara mentinerii vietii. In plus, lasand la o parte consumul energetic profesional, un om consuma intre 600-700 Kcal/24 h pentru activitati ca: imbracat, digestie, mersul de la domiciliu la locul de munca si inapoi, diferite ocupatii in timpul liber etc.
Deci, un adult consuma zilnic circa 2300-2400 Kcal/24 ore in afara muncii profesionale.
Aceste valori sunt valabile si pentru munca intelectuala, efectuata la birou, fara deplasari.
Prin adaugarea consumului energetic profesional se poate ajunge, in cazul muncilor dificile pana la 4800-5000 Kcal/24 ore.
In limbaj informational se poate afirma ca sarcina de munca atribuita omului reprezinta un mesaj adresat acestuia sub forma de solicitare, la care omul reactioneaza printr-un efort dependent de capacitatea lui. Indiferent de natura sa, efortul mobilizeaza intreaga personalitate a omului cu toate componentele lui.
In majoritatea cazurilor, sarcina de munca la care componenta importanta este cea fizica are intotdeauna o latura intelectuala, asa cum sarcina de munca preponderent intelectuala are rezonante fiziologice solicitand intregul "biotip", chiar daca se acorda importanta mai mare unora sau altora dintre formele de solicitare.
Referitor la solicitarea fizica, atunci cand este dominanta, cerinta ergonomica de optimizare a relatiei om - munca se traduce prin crearea conditiilor organizatorice de asa maniera incat consumul energetic dictat de nivelul de dificultate al muncii, posturalitatea si gestualitatea executantului in timpul muncii, eforturile depuse in timpul diverselor manipulari de obiecte grele, nivelul factorilor care caracterizeaza mediul fizic de munca etc., sa se incadreze in "standardele" ergonomice.
Solicitarile gestual posturale presupun:
a)gestualitatea - raportul direct dintre om si mijloacele de productie in activitatile cu dominanta fizica si exprima intr-o anumita masura nivelul solicitarilor fizice.
b)posturalitatea in munca exprima constrangerea aparatului locomotor al omului si circulatia sanguina din membrele superioare si inferioare datorita pozitiei impuse corpului in timpul activitatii
Solicitarea posturala se refera la:
Contractiile musculare izometrice dictate de munca statica care genereaza staza vasculara pe anumite parti ale organismului uman care "comuteaza" reactiile metabolice pe producerea de acid lactic, favorizand instaurarea rapida a oboselii fizice cu reducerea eficientei sistemului muscular.
Compresia vaselor de sange cu jenarea circulatiei arteriale si venare.
Pozitii vicioase ale corpului in general ale coloanei vertebrale, ceea ce poate favoriza aparitia tulburarii statice a organismului.
Miscari nefiziologice cu frecventa ridicata ale coloanei vertebrale care, atunci cand sunt combinate cu manipulari de greutati peste limitele admise, conduc in timp la leziuni pana la hernie de disc.
Afectiuni repetitive
(Repetitive Motion Injury -
Solicitarile energetice asigura efectuarea lucrului mecanic, respectiv a realizarii sarcinii de munca de catre organismul uman, a dezvoltarii tuturor energiilor functionale menite sa asigure oxigenarea aportului de substante hranitoare precum si degajarea tesuturilor de deseurile proceselor chimice ce au avut loc.
Solicitarea energetica poate fi masurata prin:
consumul de oxigen transformarea acestuia in Kcal;
defalcarea activitatilor motorii pe tipuri de miscari, cronometrarea acestora si cautarea echivalentului in Kcal in tabele specifice;
masurarea frecventei cardiace care reflecta debitul cardiac astfel:
frecventa cardiaca sub 65 batai/min. - solicitare farte usoara;
frecventa cardiaca intre 65 - 100 batai/min. - solicitare usoara;
frecventa cardiaca intre 101 - 125 batai/min. - solicitare medie;
frecventa cardiaca intre 126 - 150 batai/min. - solicitare ridicata;
frecventa cardiaca peste 150 batai/min. - solicitare foarte ridicata.
Solicitari dictate de microclimat. Nivelul factorilor de microclimat (temperatura aerului, viteza curentilor, umiditatea relativa) poate influenta inter-relatiile dintre organism, mediul de munca fizic, astfel incat organismul sa fie pus in situatia sa "lupte" pentru a-si mentine constanta temperatura.
Solicitarea senzoriala grupeaza: solicitarea vizuala si auditiva, in care analizatorul auditiv este supus la o dubla solicitare, ambele forme de solicitare influentand performantele in munca in momentul instaurarii oboselii cu repercursiunile ei asupra omului.
Solicitarile datorate unor noxe (fizice sau chimice)
Substantele considerate de normativele in vigoare drept nocive trebuie evitate, deoarece ele actioneaza negativ asupra starii de sanatate a omului si in plus antreneaza o stare psihica speciala asupra oamenilor obligati sa lucreze in prezenta lor.
Solicitarea neuro - psihica in munca
Elementele care influenteaza acest tip de solicitare sunt: nivelul intelectual, memoria, atentia, simtul de observatie, aptitudinea tehnica, simtul cromatic, simtul olfactiv, simtul gustativ, simtul kinestezic, coordonarea ochi - mana, coordonarea ochi - mana - picior, dexteritatea digitala si dexteritatea manuala.
De asemenea, pozitia corpului uman in timpul muncii ca element hotarator in cadrul solicitarilor statice, impune actionarea asupra motivelor care il determina pe om sa lucreze in picioare, anume:
daca activitatea necesita efort fizic sau parcurgerea unor distante;
daca efectuarea controlului necesita deplasarea intre diferite puncte fixe;
obisnuinta de a lucra in acest fel, lipsa scaunelor corespunzatoare, inaltimea necorespunzatoare a planului de munca, modul de lucru impus in pozitia ortostatica etc.
Oboseala este o notiune pe care o cunoastem destul de bine din viata curenta, din procesul muncii, caracterizata printr-o diminuare a capacitatii de munca si a rezistentei (fig. 3.4).
Schmidtke defineste oboseala "ca fenomen consecutiv unei solicitari prealabile; ea are ca efect o diminuare reversibila a performantelor si functiilor si este insotita de o micsorare a satisfactiei muncii, o marire a senzatiei de efort si poate conduce la o tulburare a armoniei functionale a personalitatii".
In functie de forma de manifestare, oboseala poate fi:
fizica (musculara: statica si dinamica);
nervoasa (senzoriala: localizata la analizatori - auz, vaz, etc.);
mentala (cerebrala: manifestata in functiile memoriei, atentiei, judecatii).
Instaurarea si evolutia oboselii
In afara eforturilor intense depuse un timp mai indelungat in procesul muncii, se considera ca un rol insemnat in instaurarea oboselii au si factorii de influenta psihologica cum ar fi:
nivelul scazut de dezvoltare a aptitudinilor pentru activitatea desfasurata;
pregatirea profesionala necorespunzatoare cerintelor realizarii sarcinii de munca incredintate;
ambianta de munca monotona la care executantul reactioneaza printr-o forma de oboseala caracterizata prin stari de apatie, de plictiseala care pot conduce la forme de somnolenta;
stresul care poate apare la locurile de munca cu grad ridicat de periculozitate; gradul scazut de motivatie pentru meseria respectiva
Forme de manifestare
Oboseala fizica apare atunci cand un efort fizic la nivelul muschiului se mentine timp prelungit cu valori cuprinse intre un nivel mediu de solicitare si un nivel de "varf" al solicitarii.
Oboseala nervoasa (senzoriala) este generata de solicitarea sau suprasolicitarea unor organe de simt (auz, vaz).
Oboseala vizuala este de natura nervoasa si se manifesta prin simptoame ca: cefalee, iritatii oculare, lacrimare, ameteala, iritabilitate psihica.
Oboseala auditiva este generata de intensitatea, durata si frecventa stimulilor sonori. Zgomotele intense timp prelungit, ca si cele intermitente, care depasesc limitele stabilite de normele republicane de protectia muncii, favorizeaza instaurarea oboselii auditive cu forme agravante, ca traumatismul auditiv sau surditatea profesionala. Instaurarea oboselii auditive este facilitata si de frecventa zgomotelor.
Oboseala mentala (cerebrala): poate apare fie in exces (suprasolicitare) fie prin monotonie (subsolicitare), astfel ca, in mod practic, in stare de veghe nu exista repaus mental propriu - zis.
Consecintele oboselii asupra organismului
Oboseala accentuata (cronica) influenteaza negativ functionalitatea organismului. In aceasta situatie, consecintele negative ale oboselii pot fi sintetizate astfel:
scaderea rezistentei generale a organismului la diferite maladii infectioase si favorizarea declansarii nevrozelor;
accentuarea uzurii, epuizarii si imbatranirii premature a organismului;
cresterea riscului de accidente prin perturbarea functionala a sistemului nervos;
reducerea atentiei si preciziei, a fortei sistemului muscular;
reducerea randamentului in munca (cantitativ si calitativ).
Prevenirea si reducerea oboselii
Principalele directii de actionare sunt:
organizarea rationala a procesului de productie si de munca, prin evidentierea componentelor statice ale muncii, a solicitarilor fizice si psihice intense, timp prelungit, a manipularilor frecvente peste limitele admise etc.
optimizarea metodei de munca, aplicarea principiilor si regulilor practice ale economiei de miscari;
optimizarea factorilor mediului fizic de munca;
dimensionarea lucrurilor de munca si a mijloacelor de munca in functie de dimensiunile antropometrice si pozitia de lucru;
evitarea monotoniei de lucru;
asigurarea securitatii muncii;
stabilirea unui regim rational al pauzelor in timpul muncii si alternarea optima a schimburilor de munca;
optimizarea ambiantei psihosociale.
Masurarea oboselii
Pentru activitatile cu componenta fizica preponderata un criteriu obiectiv de masurare a intensitatii oboselii il constituie consumul de energie umana, exprimat in Kcal pe unitate de timp, pe baza caruia muncile sunt clasificate in diferite categorii de dificultate.
Intensitatea efortului si implicit gradul de oboseala se poate aprecia de asemenea masurand si interpretand variatia frecventei cardiace (pulsul), temperatura corpului si ventilatia pulmonara (consum de oxigen); pentru facilitarea masuratorilor se recomanda numai primele doua din aceste doua metode.
Regimul pauzelor de munca
Regulile referitoare la acordarea pauzelor depind de natura muncii, intensitatea efortului depus, consumul energetic, etc., si au in vedere specificul ramurii industriale si a fiecarei intreprinderi.
In practica se folosesc, de regula, doua forme de pauza:
pauza afectata pentru masa se acorda la mijlocul schimbului de lucru;
pauzele suplimentare acordate in timpul muncii, in raport de factorii care genereaza oboseala.
Frecventa si durata pauzelor
Stabilirea variantei optime in ce priveste pauzele de munca ca frecventa, durata si moment de acordare trebuie sa aiba in vedere urmatoarele considerente fiziologice:
nivelul oboselii creste exponential si nu liniar, in functie de prelungirea activitatii desfasurate;
refacerea capacitatii de munca masurata prin frecventa pulsului, se face mai accentuat la inceputul pauzei;
acordarea pauzelor mai scurte si mai frecvente este mai avantajoasa decat cele acordate de pauzele mai mari ca durata si mai rare ca frecventa;
pauzele de odihna trebuie acordate atunci cand capacitatea de munca si productivitatea muncii incep sa scada, respectiv inaintea momentului cand oboseala atinge valori ridicate.
Ambianta fizica o constituie factorii fizici (iluminatul, cromatica, zgomotul, vibratiile, microclimatul etc.), factorii psihosociali si factorii psihologici.
Acesti factori actioneaza si influenteaza direct asupra capacitatii de munca, astfel ca optimizarea lor constituie o cale de sporire a randamentului in munca, concomitent cu protejarea unui timp indelungat a capacitatii de munca.
Pentru om, in conditiile depasirii anumitor limite ale factorilor de ambianta fizica mentionati, canalele de primire a informatiilor pot deveni sursa generatoare de efort, iar mecanismul sistemului nervos de primire, tratare si luare a deciziilor devine susceptibil dereglarilor.
In general, organele de simt indeosebi auzul si vazul, au o mare putere de adaptabilitate dar numai in anumite limite. Cand sunt depasite aceste limite poate duce la fenomene de imbolnavire ireversibile.
Iluminatul conditioneaza in mare masura activitatea omului in general si realizarea sarcinii de munca in special. Aproximativ 90% din informatii provin din intermediul organului vizual, ceea ce conduce la solicitarea importanta a acestuia si care trebuie protejata.
Un sistem de iluminat, bine proiectat, este important pentru productivitatea si calitatea muncii, cat si pentru performanta, confortul si comoditatea operatorului. Imbunatatirea unui sistem de iluminat nu consta in a instala cat mai multe surse de lumina ci si cum trebuie facut acest lucru. Exista mai multe moduri de a imbunatati calitatea iluminatului, ca de exemplu folosind "iluminatul indiscret". Un asemenea iluminat poate fi important din moment ce intensitatea luminii poate fi redusa. De asemenea persoanele mai in varsta sunt foarte sensibile la straluciri, care pot avea un efect negativ asupra vederii lor.
Investigatia vizuala poate fi sporita folosind iluminatul in scopuri speciale, iluminat care face si cele mai mici defecte vizibile.
Notiuni despre compozitia luminii. Soarele emite radiatii care sunt: invizibile si vizibile. Energia radiatiei se poate masura trimitand radiatia pe un corp negru, impermeabil la radiatii, perfect absorbant. Toata energia este transformata in caldura, usor masurabila.
In general se poate considera ca un corp perfect alb, retrimite prin difuziune toate radiatiile pe care le primeste, iar cel negru le absoarbe.
Un corp colorat este opac si apare colorat cand este luminat cu lumina alba, intrucat absoarbe anumite radiatii si trimite prin difuziune relatiile de nuanta complementara celor pe care le absoarbe.
Organul vizual si mecanismul vederii. Ochiul uman se poate compara cu un aparat fotografic care primeste raze luminoase printr-o fanta transparenta si le concentreaza cu ajutorul unei lentile pe o pelicula sensibila la lumina.
Inainte de a realiza impresia vizuala trebuie ca energia luminoasa sa declanseze un lant de procese chimice, nervoase si mentale. Ochiul are ca elemente principale: muschii, cristalinul, pupila si retina. (fig.4.1.)
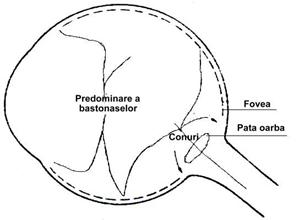
Fig.4.1.Receptorii nervosi ai retinei
Adaptarea ochiului la intuneric sau lumina necesita un anumit timp ce depinde de diferentele de lumina. De la lumina zilei la intuneric, adaptarea se face repede in cca. 5 minute, dar adaptarea totala se realizeaza in cca. 60 minute. Adaptarea ochiului in trecere de la intuneric la lumina se face ceva mai rapid, dar timpul total de adaptare este cam de acelasi ordin de marime.
Acuitatea vizuala este calitatea pe care o poseda ochiul, intr-un grad mai mult sau mai putin ridicat, de a distinge detaliile obiectelor si se determina in practica cu ajutorul tabloului de litere al opticienilor.
Factorii principali care influenteaza acuitatea vizuala sunt: contrastele, nivelul de iluminare si timpul de expunere.
Sursele luminoase sunt caracterizate de urmatorii parametrii:
Intensitatea luminoasa: defineste cantitatea de lumina intr-o directie data si unitatea de masura este candela.
Luminanta sursei: reprezinta raportul intre intensitatea luminoasa si suprafata.
Corpurile/suprafetele iluminate prezinta:
Iluminarea: este densitatea fluxului luminos pe o suprafata de iluminat.
Luminanta: este cantitatea de lumina reflectata de o suprafata iluminata. Unitatea este candela/m²; stilbul si apostilbul, iar aparatul de masura se numeste luminometru.
Factorul de reflexie: reprezinta raportul dintre fluxul reflectat si fluxul incident.
Experienta castigata in timpul interpretarii rezultatelor masuratorilor de performanta vizuala in situatii practice, a aratat ca, in cele mai multe cazuri, este imposibil sa se stabileasca recomandari de iluminare pentru interioarele de lucru bazate numai pe acest tip de masurari. Astfel, nu se poate determina o sarcina vizuala standard. Cele mai multe sarcini vizuale practice sunt complexe si difera de la o incapere de lucru la alta. Mai mult, recomandarile nu sunt limitate numai la suprafetele de lucru; incaperile de circulatie si de recreare dintr-un interior trebuie sa fie de asemenea considerate, si aici criteriul performantei vizuale nu poate fi totdeauna aplicat. Ca un rezultat al cercetarilor in evaluarea subiectiva a nivelului de iluminare, descrisa in paginile urmatoare, este recunoscut faptul ca gradul satisfactiei vizuale produse de nivelul de iluminare este un important criteriu aditional in toate tipurile de mediu.
Valorile iluminarii preferate. Experienta practica
arata ca nivelurile de iluminare fie mai jos, fie putin peste
cei 2000 lux, sunt optime. Datorita consideratiilor de cost si
consum de energie, o iluminare in domeniul a 1000 lux pare sa ofere o
solutie rezonabila. In scopul de a obtine informatii asupra
luminantelor preferate ale sarcinilor, iluminarile preferate
gasite in numeroase cercetari, rezultatele au fost convertite in
valori ale luminantei si figurate ca o functie a factorului de
reflexie corespunzator al sarcinii, cum este data in
publicatiile de specialitate. Cum se putea presupune din valorile apropiate ale
iluminarii preferate in diferite cercetari, luminanta
preferata a sarcinii nu este constanta, fiind corelata cu
factorul de reflexie a sarcinii. Daca factorul de reflexie este
scazut, luminanta considerata ca satisfacatoare este
mai scazuta decat pentru sarcinile cu factori de reflexie mai mari.
Astfel, teoria frecvent vehiculata in trecut, ca daca factorul de
reflexie este redus la jumatate din valoarea sa, iluminarea trebuie
sa fie dublata, nu poate fi valabila in domeniul optim al
iluminarii. Valorile luminantelor preferate ale sarcinii se afla
intre aproximativ 100cd/m2 la ![]() =0,2
si 400cd/m2 la
=0,2
si 400cd/m2 la ![]() =0,8.
Iluminarile necesare pentru a realiza aceste valori ale luminantei se
afla intr-un domeniu relativ ingust sub 2000 lux.
=0,8.
Iluminarile necesare pentru a realiza aceste valori ale luminantei se
afla intr-un domeniu relativ ingust sub 2000 lux.
Din rezultate apare ca factorul
principal, ce afecteaza aprecierea operatorului asupra iluminatului, a
fost nivelul de iluminare pe suprafata de lucru (sau altfel spus
luminanta ariei sarcinii). Mai mult insa, cu cat iluminarea a fost
sporita, aprecierea nivelului de iluminare de catre "observatorul
mediu" a crescut considerabil cu cresterea nivelului iluminarii,
pana cand a fost atinsa o valoare de aproape 800 lux. Peste 800 lux,
proportia cresterii aprecierii subiective a tins sa se egaleze,
iar peste 1000 lux, cand observatorul mediu a fost complet satisfacut,
orice ridicare de nivel a produs numai o usoara crestere a
aprecierii.
Valorile iluminarii minime. Pentru stabilirea nivelului minim al iluminarii necesare in interioarele de lucru, unde sarcinile vizuale nu sunt in mod particular precizate, ar parea normal sa se ia in considerare perceptia trasaturilor umane, ca un criteriu determinant.
Presupunand un factor de reflexie a tenului uman de 0,4 este necesara o iluminare verticala pe fata, de peste 100 lux, respectiv o iluminare orizontala de aproape 200 lux, pentru a realiza o luminanta a figurii de 17cd/m2.
Astfel, iluminarea de 200 lux este considerata ca valoare minima atat pentru incaperile in care omul sta un timp indelungat, cat si pentru toate spatiile de lucru.
Valorile iluminarii preferate In spatiile de circulatie si cele similare, iluminarea este considerata in functie de perceperea si conturarea generala a oamenilor si a obiectelor iluminate. Faptul ca iluminarea orizontala nu ofera cea mai potrivita evaluare a iluminatului in astfel de spatii a condus catre doua marimi ce pot fi luate in considerare:
a. iluminarea cilindrica medie
b. iluminarea sferica medie.
Iluminarea cilindrica medie intr-un punct din spatiu, intr-un interior, este definita ca iluminarea medie pe suprafata unui mic cilindru vertical plasat in acel punct.
Iluminarea sferica medie, sau iluminarea scalara, intr-un spatiu dintr-un interior, este definita ca iluminarea medie pe suprafata unei mici sfere plasate in acel punct.
La 100 lux, nivelul iluminarii cilindrice medii, la care 95% din observatori au considerat un interior bine luminat, ar putea fi luat ca un nivel acceptabil pentru interioarele de acest tip.
Iluminarea orizontala corespunzand acestei valori se va afla in domeniul 100-200 lux.
Valorile iluminarii minime. Cercetarile au aratat ca o luminanta a figurii de aproximativ un cd/m2 a fost necesara pentru a percepe corect trasaturile umane, ceea ce corespunde unei iluminari orizontale de aproximativ 20 lux. Aceasta valoare este considerata ca iluminarea orizontala minima pentru spatii de circulatie si incaperi de importanta secundara.
Printre factorii de ambianta fizica care exercita o influenta importanta asupra muncii si intensitatii efortului operatorului, conditionand calitatea si cantitatea rezultatelor muncii sale, precum si gradul sau de oboseala este iluminatul. Acest factor trebuie apreciat ca un element legat de eficacitatea muncii, de protejarea organelor de simt vizual si de asigurarea operatorului impotriva accidentelor.
Rolul deosebit de important al ochilor in activitatea desfasurata de om, rezulta din cercetarile fiziologice si psihologice, care arata ca 80-90% din totalul informatiilor percepute care ajung la scoarta cerebrala sunt de natura vizuala.
De asemenea orice executant solicita ochiul atat pentru orientarea si coordonarea miscarilor, cat si pentru coordonarea functiilor intregului organism.
In general exista tendinta ca fiecare miscare sa fie insotita de privire, circa 80% dintre activitatile noastre desfasurandu-se sub controlul privirii.
Avand in vedere importanta deosebita a ochilor, organizatorii de proces, trebuie sa se preocupe intens pentru a menaja privirea operatorilor, fiindca aceasta solicitata prea mult sau prea intens poate duce la oboseala oculara sau oboseala nervoasa.
Oboseala oculara se manifesta cand operatorul lucreaza in conditiile de iluminare insuficienta, cand diferitele functii ale ochiului sunt supuse unei solicitari intense si unilaterale. Ea se manifesta prin: dureri, arsuri sau mancarimi ale globului ocular, lacrimatie, injectarea pleoapelor, dureri de cap, imagine dubla, scaderea capacitatii de acomodare la lumina, reducerea vitezei de percepere, diminuarea sensibilitatii la contraste si slabirea acuitatii vizuale.
Pentru indivizii in varsta sunt mai multe schimbari fizice ce se petrec in ochi. Cea mai importanta este acomodarea (pierderea puterii de concentrare) cu lentilele oculare. Aceasta deoarece odata cu inaintarea in varsta lentilele oculare isi pierd din elasticitate si prin urmare ele nu se mai pot intinde si umfla ca si inainte.
Figura 7.5 arata ca media de acomodare pentru 25 de ani este in jur de 11 dioptrii dar pentru 50 de ani este doar de 2 dioptrii si pentru 65 de ani de o singura dioptrie. Numarul de dioptrii asociat unei vederi clare reprezinta cel mai apropiat si cel mai indepartat punct. Sa presupunem ca pentru 25 de ani cel mai indepartat punct este la infinit. Cel mai apropiat punct este atunci situat la 9 cm. Acest lucru poate fi calculat folosind ecuatia:
![]()
unde f este distanta (metri) si D este numarul de dioptrii pentru acomodare.
Fig.4.2 Schimbari datorate varstei in acomodarea ochiului uman.
Zona hasurata indica variabilitatea indivizilor.
Pe orizontala e reprezentata varsta in ani, iar pe verticala acomodarea in dioptrii.
Tab. 4.1. Iluminanta recomandata
|
Tipul de sarcina |
Marimea iluminatiei [lux]* |
|
Locuri de munca unde sarcinile vizuale sunt indeplinite doar ocazional |
|
|
Teme vizuale de contrast mare sau de marime mare: material tiparit, masina de lucru, inspectare obisnuita |
|
|
Timp indelungat de lucru cu terminale vizuale (calculatoare)** |
|
|
Teme vizuale de contrast mediu sau marime mica: scris de mana, inspectare dificila, asamblare medie |
|
|
Teme vizuale de contrast mic si marime foarte mica: scris de mana pe hartie de calitate proasta, inspectare foarte dificila |
|
|
Teme vizuale de contrast mic si marime foarte mica pe o perioada prelungita: asamblare fina, inspectare foarte dificila |
|
|
Teme vizuale exacte si foarte prelungite: asamblare extra-fina, cea mai dificila inspectare vizuala |
|
Valorile mici sunt pentru indivizi mai tineri de 40 ani iar cele mari pentru indivizii a caror varsta depaseste 55 ani.
**
Aceasta recomandare este facuta de
La fel, daca cel mai indepartat punct, pentru 50 ani cu 2 dioptrii, ar fi la infinit, atunci cel mai apropiat este la 50 cm (fig. 4.3). Daca presupunem ca aceeasi persoana de 50 ani are 3 dioptrii si sufera de miopie, atunci cel mai indepartat punct (fara ochelari) este la 33 cm iar cel mai apropiat la 20 cm. O persoana tanara, care sufera de miopie, va realiza ca, odata cu inaintarea in varsta cel mai indepartat punct se apropie, iar cel mai apropiat punct se indeparteaza. Pentru un individ ce nu sufera cu vederea ca persoana tanara va constata ca cel mai apropiat punct se indeparteaza in timp cel mai indepartat punct poate ramane la infinit. Implicarea in munca industriala este aceea ca diferitele categorii de vedere afecteaza nu numai vizibilitatea unui obiect ci si postura de munca. Pentru a compensa vederea slaba, o persoana mioapa se va apropia de obiect, iar o persoana hiperopica se va indeparta. O postura de munca proasta este cauzata de o vedere slaba. Daca vederea este corectata cu ajutorul ochelarilor, atunci postura este corectata automat. Operatorii sunt adesea prost informati despre ce fel de corectari vizuale sunt realizabile. Pentru a avertiza si a ajuta operatorii, unele companii angajeaza optometristi care masoara distanta exacta dintre ochiul uman si diferite obiecte si astfel se pot prescrie ochelarii necesari.
Fig. 4.3. Calcularea celui mai apropiat punct si a celui mai indepartat punct al "vederii functionale". O raza buna de vedere depinde de acomodarea (in dioptrii) a lentilei in ochi si de eroarea refractiva. In prima figura e reprezentata o persoana de 40 de ani cu 5 dioptrii pentru acomodare; in a doua, o persoana de 50 de ani cu 2 dioptrii; iar in a treia, o persoana de 50 de ani cu 2 dioptrii si 3 dioptrii pentru miopie (fara ochelari). E de asemenea reprezentata distanta cea mai indepartata si cea mai apropiata pentru fiecare caz.
Prima intrebare evidenta care se pune la proiectarea unei instalatii de iluminat interior este "ce niveluri de iluminare sunt necesare?". Inainte de a da raspuns acestei intrebari, este necesar sa se clarifice exact care este semnificatia termenului, "nivel de iluminare".
Emisia de radiatii luminoase a unei surse de lumina reprezinta fluxul luminos masurat in lumeni. Fluxul luminos incident pe unitatea de arie a unei suprafete este numit iluminare, care este masurata in lumeni pe metru patrat sau lucsi. Stralucirea suprafetei iluminata de sursa, sau mai precis luminanta sa masurata in candele pe metru patrat, este direct proportionala cu produsul dintre iluminare si factorul de reflexie al suprafetei (raportul dintre fluxul luminos reflectat si fluxul luminos incident).
Aceste doua marimi, iluminarea si luminanta, sunt deci strans interdependente, elementul de conexiune fiind factorul de reflexie a suprafetelor iluminate.
Deci, in cazul suprafetelor reflectante perfect difuzate relatia de conexiune este:
![]() , (4.2,1.)
, (4.2,1.)
unde L este luminanta in cd/m2, E
iluminarea in lux si ![]() factorul
de reflexie. Datorita acestei stranse interconexiuni cele doua
marimi, iluminarea si luminanta, sunt tratate impreuna ca niveluri de
referinta in iluminat.
factorul
de reflexie. Datorita acestei stranse interconexiuni cele doua
marimi, iluminarea si luminanta, sunt tratate impreuna ca niveluri de
referinta in iluminat.
Daca se revine la intrebarea pusa mai sus, raspunsul va depinde de tipul interiorului considerat. In camere sau suprafete in care sarcinile vizuale trebuie avute in vedere, asa numitele "incaperi de lucru" nivelurile de iluminare cerute vor depinde uzual de dificultatea sarcinii vizuale si de nivelul performantei vizuale, fiind de luat in considerare insa si confortul operatorului in ambianta vizuala. In incaperile de circulatie si in locurile destinate contactelor sociale, destinderii si divertismentului, cu exceptia salilor de sport, criteriul performantei vizuale nu mai este determinant, ponderea trecand aproape in intregime asupra criteriului confortului vizual.
Fluxul luminos F se defineste in functie de fluxul energetic specific Fe,l [W/nm] cu relatia:
 (4.2.2.)
(4.2.2.)
in care km este o constanta.
Astfel fluxul luminos reprezinta fluxul radiant emis in spectrul vizibil, evaluat prin intensitatea senzatiei vizuale, fiind marimea fundamentala de iluminat.
Intensitatea luminoasa Ia pe o anumita directie a reprezinta raportul dintre fluxul luminos elementar dF emis intr-un unghi solid infinit mic dW, adica:
![]()
Unitatea de masura a intensitatii luminoase, este candela [cd], corespunzand unui flux de 1 lm emis intr-un unghi solid de 1 sr.
Dificultatile tehnice de realizare a unui etalon de flux au facut ca intensitatea luminoasa sa fie considerata conventional marime fundamentala si inclusa in sistemul international (SI). In consecinta pentru unitatea de masura a intensitatii luminoase este data urmatoarea definitie: candela reprezinta intensitatea luminoasa intr-o directie data a unei surse care emite o radiatie monocromatica de frecventa 540 1012 Hz, corespunzand la l = 555 nm in aer, pentru care intensitatea energetica este de 1/683 W pe steradian.
Conform celor prezentate anterior, iluminarea E, caracterizeaza receptia de flux luminos si reprezinta raportul dintre fluxul dF receptat de suprafata elementara dS, adica:
![]()
unitatea de masura fiind luxul [lx]. Astfel, 1 lux reprezinta iluminarea unei suprafete de 1 m2 care recepteaza un flux de 1 lm.
![]()
Este marimea ce caracterizeaza emisia de flux luminos al unei suprafete, reprezentand raportul dintre fluxul emis dF si suprafata elementara dS, adica: similar cu iluminarea, unitatea de masura este tot luxul [lx].
Luminatul La a unei suprafete luminoase elementare dS se defineste in raport cu pozitia observatorului fata de suprafata privita dS caracterizata prin intensitatea dIa, astfel:
![]() (4.5)
(4.5)
in care s-a notat cu a unghiul facut de intensitatea luminoasa coliniara cu raza vizuala si normala la suprafata emisiva.
Unitatea de masura este candela pe metru patrat [cd/m2], denumita in unele publicatii si nit [nt].
Eficacitatea luminoasa a unei radiatii monocromatice K(a) este definita de relatia:
![]() (4.6.1.)
(4.6.1.)
De exemplu, pentru corpul negru la T = 6500K se obtine K = 85 lm/W. pt. sursele de lumina se defineste eficacitatea luminoasa exprimata astfel:
![]() (4.6.2.)
(4.6.2.)
in care F este fluxul emis de sursa, iar Pc puterea consumata de aceasta.
Energia luminoasa se defineste cu relatia:
 (4.7.1.)
(4.7.1.)
in care F[lm] este fluxul emis de o sursa in timpul T [s].
Expunerea luminoasa H a unei suprafete se poate defini fie in functie de energia luminoasa Q receptata, fie in functie de iluminarea E pe suprafata, adica:
 s] (4.7.2.)
s] (4.7.2.)
Expunerea luminoasa este utilizata in mod curent in tehnica imprimarii imaginii pe pelicula sau banda magnetica.
Luminante preferate. In ambianta vizuala interioara intervine stralucirea si culoarea varietatii de obiecte si suprafete existente (mobilier, echipamente si aparate, suprafete in orice tip de incapere etc.).
Se impune controlul asupra acestor doi parametri in scopul realizarii confortului vizual si ambiantei placute. Coordonarea acestor doua aspecte poate fi realizata numai printr-o stransa colaborare intre inginerul de iluminat si arhitectul decorator.
Luminanta este o functie de iluminare si de factorul de reflexie; adica cresterea factorului de reflexie sau cresterea iluminarii sau ambele simultan provoaca cresterea luminantei.
Limitele domeniului luminantelor pana la care ochiul uman poate recepta fara sa aiba vreo pierdere serioasa a sensibilitatii de diferentiere a stralucirii sau vreo senzatie de inconfort au fost determinate prin cercetare. Valorile luminantei diferitelor obiecte din campul vizual al observatorului (corpuri de iluminat, plafon, pereti etc.) trebuie determinate incat sa fie in limitele domeniului accesibilitatii vizuale.
Intr-o incapere de lucru,
luminanta suprafetei sarcinii vizuale si a suprafetelor
principale din campul vizual au o legatura directa cu confortul
vizual, influentand de asemenea asupra performantei persoanei care
realizeaza sarcina vizuala. Acelasi efect il au sursele de
stralucire din incapere cum sunt corpurile de iluminat si ferestrele.
Acestea pot produce o marire a senzatiei de inconfort, chiar
daca celelalte luminante se afla in limitele recomandate.
Succesul unei instalatii de iluminat proiectate este adeseori judecat prin efectul pe care iluminatul il are asupra redarii trasaturilor figurii umane. De exemplu, intr-o incapere partial iluminata natural, iluminatul artificial trebuie astfel proiectat incat sa elimine "efectul de silueta" pentru figura umana, iluminand corespunzator artificial trasaturile acesteia.
Modelarea este proprietatea luminii de a contura forma si textura prin realizarea contrastului de stralucire. Este foarte importanta cu privire la trasaturile umane sau alte obiecte tridimensionale. O buna modelare ajuta la punerea in evidenta a detaliilor in multe tipuri de sarcini vizuale.
Un alt factor de ambianta fizica care influenteaza consumul de energie al intregului organism uman, starea de oboseala cat si rezultatele cantitative si calitative ale muncii il constituie culorile sau ambianta cromatica.
Stiintele care stau la baza ergonomiei scot in evidenta efectele fiziologice si neuro-psihice pe care cromatica obiectelor le exercita asupra omului.
Caracteristici: diversele portiuni de lumina alba (radiatii electromagnetice cu lungimi de unda cuprinse intre 380 si 780 mm) genereaza in analizatorul vizual senzatia anumitor culori.
Dintre parametrii care caracterizeaza culorile se cuvine mentionate:
. nuanta spectrala - determinata de lungimea de unda prin care pot fi diferentiate culorile.
. luminozitatea - determinata de adausul alb sau negru.
. puritatea - determinata de adausul de gri.
Cercetarile si experientele facute de specialisti au demonstrat ca imbinarea culorilor poate (in conditii de temperatura medie) sa influenteze si sa modifice senzatia de confort, sa afecteze functionalitatea si solicitarea diferitelor organe anatomice, sa influenteze psihicul omului.
In tabelul 4.2 sunt prezentate sintetic aceste efecte produse de culori asupra omului.
In ceea ce priveste culorile, trebuiesc retinute cateva constatari generale:
- culoarea este cu atat mai calda cu cat se apropie de rosu si cu atat mai rece cu cat este mai dominant albastru;
- culorile inchise au efect depresiv, descurajant, negativ;
- culorile prea vii sunt prea obositoare;
- culorile deschise au efect stimulant, vesel pozitiv.
Combinatiile de culori folosite la vopsirea cladirilor, incaperilor, utilajelor, mobilierului, echipamentelor etc. trebuie sa urmareasca in primul rand efectul cromatic utilitar si in al doilea rand estetica. Bineinteles ca intre doua sau mai multe combinatii posibile de culori cu acelasi efect utilitar se va adopta varianta cea mai estetica.
Tab. 4.2 Efectele fizio-psihice ale culorilor
|
Culoarea |
Efectele fiziologice |
Efecte neuro-psihice |
|
rosu |
- creste presiunea sanguina - ridica tonusul muscular - activeaza respiratia |
- culoare foarte calda - stimulator general - stimulator intelectual senzatie de apropiere in spatiu |
|
portocaliu |
- accelereaza pulsatiile inimii - mentine presiunea sanguina - favorizeaza secretia gastrica si digestia |
- culoare calda - stimulent emotiv - senzatie de apropiere foarte mare in spatiu |
|
galben |
- influenteaza functionarea normala a sistemului cardiovascular |
- culoare calda - culoarea cea mai vesela - stimuleaza vederea - calmant al psihonevrozelor - senzatia de apropiere in spatiu |
|
verde |
- scade presiunea sanguina - dilata vasele capilare |
- culoare rece - culoare linistitoare - impresie de prospetime - faciliteaza deconectarea nervoasa - senzatia de departare in spatiu |
|
albastru |
- scade presiunea sangelui - scade tonusul muscular - calmeaza respiratia si frecventa pulsului |
- culoare foarte rece - culoare linistitoare - in exces, conduce la depresii - senzatia de departare in spatiu |
|
violet |
- creste rezistenta cardio-vasculara - creste rezistenta plamanilor |
- culoare rece - culoare nelinistitoare, descurajanta |
Alegerea culorilor pentru o incapere, pentru mobilierul, utilajele, instalatiile sau uneltelor aflate in zona de lucru trebuie sa se faca tinand seama de principalii factori fizici ai culorilor, care rezida in caracteristicile de reflectare si de absorbtie a luminii.
In tabelul 4.3 sunt prezentati coeficientii de reflexie ai culorilor pentru cele mai uzuale tente de culori.
Tab. 4.3 Coeficientii de reflexie ai culorilor
|
Culoarea |
Reflexia lumini(%) |
culoarea |
Reflexia lumini(%) |
|
Alb CULORI DESCHISE Crem alburiu Gri deschis Galben deschis Bej deschis Verde deschis Bleu deschis Roz deschis CULORI MIJLOCII Galben Gri Verde Albastru |
|
CULORI INCHISE Gri inchis Portocaliu Rosu viu Cafeniu Albastru Verde inchis Negru inchis CULORI DE LEMN Artar Paltin Stejar Nuc Mahon |
|
Dupa cum se poate constata, culorile deschise reflecta lumina intr-o proportie mult mai mare decat cele inchise. Astfel, intre albul stralucitor, care reflecta lumina in proportie de 85%, si negrul, care absoarbe aproape intreaga lumina 97%, restul culorilor prezinta variatii foarte mari.
La stabilirea cromaticii locului de munca trebuie sa se tina seama de urmatoarele conditii specifice:
- continutul muncii si solicitarile executantilor (fiziologice si neuro-pshice);
- functiile incaperii si ale fiecarui obiect;
- senzatia de confort ambiant sau de stimulare neuro-psihica;
- menajarea vederii;
- usurarea perceptiei senzoriale;
- posibilitatea de intretinere a curateniei in functie de specificul productiei;
- estetica locului de munca.
Ordinea de abordare si numarul acestor conditii nu sunt riguroase. In functie de specificul activitatii este posibil ca cerintele coloritului sa fie mai numeroase, iar succesiunea lor sa fie modificata.
Tinand seama de continutul muncii, de functiile incaperii si ale fiecarui obiect in parte, este necesar ca suprafetele sa asigure un anumit contrast vizual. La suprafetele mari, acest contrast se poate realiza prin culori cu coeficienti de reflexie similari, dar fara contraste de densitate a luminii, care produc tulburari vizuale. De asemenea, la amenajarea locului de munca propriu-zis trebuie evitate diferentele de luminozitate; contrastul dintre obiecte si uneltele de munca sau planul de lucru poate sa fie asigurat prin culori cu coeficienti de reflexie diferiti.
Suprafetele mici de cativa centimetri ale obiectelor care trebuie sa iasa in evidenta se vor vopsi in culori stridente, cu contraste puternice de reflexie si de densitate a luminii. Aceasta cerinta se va aplica in special la sistemele de comanda, manere, manivele, volante, capete terminale si butoane, cu conditia ca suprafata acestora sa nu fie mare. Contrastul cel mai puternic se poate obtine prin culorile galben si negru. In general nu trebuie facut exces de contrast de culori; obiectele care atrag privirea prin contrast sa nu depaseasca 3-5 culori.
Pentru a raspunde cerintelor organizarii stiintifice a productiei si a muncii, cromatica locului de munca trebuie sa preocupe cadrele de conducere tehnica si economica. Inginerul, arhitectul, ca si cei raspunzatori cu intretinerea administrativ-gospodareasca trebuie sa invete folosirea ergonomica a culorilor pentru a crea omului, in mediul sau de munca, ambianta cromatica functionala.
Dupa cum s-a aratat anterior din efectele fiziologice si psihologice ale culorilor, exista culori calde si culori reci. Culorile calde sunt culori dinamice (de miscare) in timp ce culorile reci sunt culori statice, calmante si odihnitoare. Culorile calde sunt recomandate pentru a fi utilizate cu precadere in spatiile reci, cu temperatura scazuta pentru a le insufleti, a le dinamiza si pentru a da senzatia de caldura si de apropiere. Culorile reci sunt recomandabile pentru spatii supraincalzite, acolo unde se produc degajari mari de caldura sau unde insasi sursa de caldura este vopsita in culori calde. Aceste culori pot da senzatia de racoare si de o buna aerisire.
Astfel, rosul, portocaliul si galbenul considerate, percepute si traite ca si culori calde, sunt si ele insele culori ale unor obiecte si fenomene din natura pe care oamenii le-au perceput din totdeauna si care printre altele au si calitatea de a genera senzatii de cald, deschidere, lumina etc.: soarele, focul, sangele, flacara etc. in mod similar, culorile reci, verde, albastru si violetul sunt si culorile spatiilor imense, ale cerului, intinderilor de apa, umbrei, frigului etc.
Deschiderea sau inchiderea psihologica a unui spatiu, ca si marimea sau micsorarea lui din punct de vedere perceptiv o putem, prin urmare, realiza destul de bine prin utilizarea simultana sau alternativa, contrastanta sau continua a unor game variate de tonalitati si intensitati cromatice, alese in functie de dimensiunile si caracteristicile functionale ale spatiului. Culorile deschise si intense, avand o putere de iradiere mai mare decat cele inchise, au calitatea de a da senzatia de marire a unui spatiu.
Prin iluzie perceptiva s-a demonstrat faptul ca peretele de culoare deschisa dispus pe un fond inchis, spre deosebire de peretele de culoare inchisa care atunci cand se afla intr-un camp deschis par mai mici.
Negrul da senzatia de inchidere, intrare, retragere, sobrietate, micsorare, interiorizare, in timp ce albul, ca explozie de lumina, induce senzatia de deschidere, iesire, depasirea unui cadru, marire.
Culorile luminoase sunt indicate pentru spatii mici, inguste si intunecoase in ideea de a le face mai luminoase si a le "mari", a crea senzatia de spatialitate.
Dimpotriva, culorile intunecate sunt indicate pentru spatii deschise si puternic luminate pentru a le centra si delimita, pentru a crea zone dominante si a le da un sens, si structura perceptiva.
Cu ajutorul culorilor putem in acelasi timp crea si senzatia de apropiere sau indepartare in spatiul, putem "indeparta" sau "apropia" obiectele intr-un spatiu. Culorile deschise maresc si indeparteaza, iar culorile inchise micsoreaza si apropie dupa cum culorile calde dau senzatia de apropiere iar cele reci de indepartare si spatialitate.
Un panou, perete, zid etc. colorat in rosu cald sau portocaliu roscat este perceput ca fiind mai apropiat decat este in realitate, dupa cum in cazul nuantelor albastre reci, lucrurile stau invers. Singurele culori care sunt neutre din acest punct de vedere, adica sunt in pozitia lor reala din spatiu sunt verdele si galbenul. Senzatia de claustrare pe care o creeaza un spatiu prea mic poate fi anihilata prin tonul deschis al unei culori reci care indeparteaza, spatiaza, da impresia de mai mare.
Culorile calde si luminoase creeaza o buna dispozitie, dau impresia de prospetime si au un efect stimulativ reconfortant. Albastru si verdele dau o senzatie de liniste. Violetul este nu numai o culoare rece dar creeaza o stare psihica descurajatoare. Galbenul, dimpotriva, inveseleste prin luminozitatea sa mare, incanta ochiul si stimuleaza placut. Cenusiul este deprimant. In general, majoritatea cercetarilor au demonstrat faptul ca atunci cand este vorba de culori pure, culorile luminoase sunt vesele, declanseaza si intretin stari afective pozitive, de entuziasm, optimism si incredere, in timp ce culorile intunecate au efecte contrare: induc stari de tristete, declanseaza stari afective negative, de retinere, teama, neincredere. Griul-deschis induce stari de tristete si monotonie, in timp ce rozul sau portocaliul-deschis inspira optimism, incredere, veselie.
De asemenea, orice culoare isi schimba tonalitatea si intensitatea in raport cu alte culori ce o inconjoara. Marea arta a armoniei cromatice consta tocmai in stapanirea cat mai perfecta a valorilor combinatiilor si echilibrului cromatic. Se spune ca cea ce conteaza nu sunt culorile in sine ci valorile cromatice care se obtin prin combinarea, dispunerea, armonizarea si echilibrarea diferitelor tonuri si nuante cromatice.
Culoarea este un mijloc de expresie, de comunicare si proiectie a tendintelor si pulsiunilor interioare, a trairilor si atitudinilor proprii structurii personalitatii noastre.
Pentru culori se foloseste un test ce se bazeaza pe preferinta de culori numit testul color Luscher. Testul este unul cromatic cu ajutorul caruia, pe baza selectiei in ordine a
preferintei unui set de culori, se poate realiza o autocunoastere adecvata a caracteristicilor de personalitate.
O varianta complecta este formata din 7 seturi diferite de culori, continand 73 culori formate in 25 de nuante diferite si solicitand in testare 43 de aleeri diferite de realizat. O alta varianta restransa este formata din 8 culori: albastru-intunecat, verde albastrui, rosu-oranj, galben stralucitor, violet, maro, negru si gri-neutru.
Zgomotul depinde de conditiile particulare de munca si de viata, conducand la stari psihice si fiziologice nocive pentru oamenii supusi acestuia.
Zgomotul constituie un factor principal al oboselii si nervozitatii si influenteaza negativ atat nivelul cantitativ al muncii prestate, cat si starea de sanatate a oamenilor.
Ca fenomen sonor, zgomotul este determinat in principal de trei caracteristici fizice: frecventa, presiunea acustica sau intensitatea.
Presiunea acustica (intensitatea) se masoara, de regula, in decibeli (decibelul zero corespunde celui mai slab sunet), iar pragul de audibilitate este variabil in raport de frecventa. Suprafata de audibilitate este prezentata (fig. 4.4.)
Fig. 4.4. Suprafata de audibilitate
Organul auditiv comporta:
un sistem de percepere format din urechea exterioara;
un sistem de transmitere format din urechea medie si interna;
un sistem de percepere constituit din caile nervoase ce exista intre ureche si centrii nervosi din creier.
Urechea externa: realizeaza penetrarea sunetelor care fac sa vibreze timpanul. Urechea medie: transmite vibratiile de la timpan printr-un sistem de oscilare: ciocan, nicovala si scarita. Urechea interna: preia sunetele transmise de urechea medie si le propaga pana la membrana basiliara care intra in vibratie in functie de frecventa sunetelor receptionate.
Auditia este realizata cu ajutorul cailor nervoase prin intermediul carora impulsurile ajung in creier unde sunt integrate si percepute ca sunete.
Pe baza corelarii dintre intensitate si frecventa zgomotului s-au stabilit curbele de zgomot (CZ) pentru diferite activitati.
In ce priveste timpul maxim de expunere la zgomot in functie de intensitate este de subliniat ca la peste 130 dB timpul de rezistenta a organului auditiv este de cca. 10-20 sec. Fara a se semnaliza modificari, iar in 120 dB doar cateva minute dupa care se instaureaza diverse tulburari de auditie.
Efectele zgomotului. De regula, zgomotul declanseaza o stare de "alerta" a organismului (opusa somnului), favorizand inconfortul.
Eliminarea zgomotelor. Operational, problema prevenirii si combaterii zgomotului trebuie sa aiba in vedere in principal urmatoarele directii:
stabilirea originii zgomotului;
eliminarea surselor generatoare;
atenuarea propagarii si protectia individuala (cand eliminarea totala a sursei generatoare nu este posibila);
izolarea fonica a incaperilor;
acoperirea cu carcase fonoizolante si fonoabsorbante a pieselor sau ansamblelor de piese care produc zgomote;
prevederea de atenuatoare de zgomot speciale la masinile unelte care produc zgomote de natura aerodinamica;
micsorarea suprafetelor metalice mari (carcase, capace) care radiaza zgomote, prin acoperirea cu materiale fonoabsorbante;
inlocuirea, pe cat posibil, la masinile unelte in special, a miscarilor rectilinii prin miscari de rotatie si a operatiilor cu socuri sau fara.
Vibratiile apar de obicei in urma socurilor, a fortelor de frecare sau a solicitarilor alternative mecanice sau magnetice, iar daca se depaseste nivelul admis de recomandarile fiziologice provoaca perturbari organice grave, cu implicatii negative asupra starii de sanatate a oamenilor.
Relatia dintre frecventa vibratiilor (cicluri/sec) si amplitudinea lor (in cm) este prezentata in figura 7.21.
In ce priveste frecventa dominanta a vibratiilor pot fi categorisite astfel:
sub 15 Hz sunt in general vibratiile provocate autovehiculele de transport.
15-40 Hz caracterizate prin amplitudini importante, se regasesc indeosebi in constructii si lucrari publice.
40-300 Hz se regasesc in general la utilajele folosite in minele de fier, siderurgie si metalurgie.
Peste 300 Hz vibratiile re regasesc la unele masini unelte, de exemplu polizoarele cu viteze mari de rotatie.
Fig 4.5
Sub denumirea de "microclimat" se includ: temperatura aerului, viteza curentilor de aer si umiditatea relativa a aerului. Intre acesti factori exista o interdependenta. Efectele temperaturii aerului asupra performantelor omului in procesul muncii nu sunt inca cunoscute dar practica a demonstrat ca unele temperaturi influenteaza negativ randamentul de munca.
Termoreglarea pune in miscare mecanisme fizice si mecanisme fiziologice. Mecanismele fizice realizeaza schimbul de caldura intre corpul omenesc si mediul ambiant. Asigurarea unui microclimat corespunzator este dependent si de ventilatia aerului in incintele respective.
Diversi autori au determinat sferele de confort la diversi factori ambientali. In figura 7.25 se prezinta o astfel de determinare in care sunt inclusi, in afara factorilor de ambianta fizica cu intalnire frecventa si pe care i-am prezentat in acest capitol (iluminatul, zgomotul, vibratii etc.) si factori cu intalnire mai rara sau specifici numai unor anumite activitati (monoxidul de carbon, pierderile termice, radiatiile atomice etc.).
Coroana circulara a figurii 4.6 indica campul de toleranta al zonei de confort.
In afara zonei se situeaza conditiile de disconfort.
Fig. 4.6 Sfera de confort pentru diversi factori ai ambiantei fizice
Marea majoritate a oamenilor experimenteaza dureri de spate la un anumit punct al vietii lor. Unul dintre factorii care contribuie la aceste dureri este si condusul pe distante lungi. Statul in aceasi pozitie in fata volanului si fiind expus la vibratii datorita drumului are un efect negativ asupra spatelui. Pentru a reduce din efectele negative ale condusului putem apela la anumite trucuri.
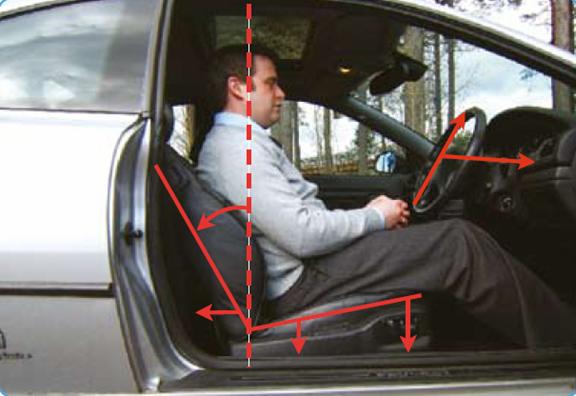
In primul rind trebuie sa avem o pozitie corecta la volan si pentru aceasta trebuie sa urmam urmatorii pasi: Incepem prin a ajusta componentele pe care le vom folosii de-alungul deplasarii, adica volanul si scaunul soferului.
Ridicam volanul si il impingem cat mai mult posibil, lasam scaunul cat mai pe spate, lasam sezutul cat mai jos, impingem scaunul cat mai in sapte ca si in figura de mai sus.
Acum urmeaza pasii care trebuie sa-i respectam a sta cat mai corect pe scaun si a reduce cit mai mult efectele negative datorate drumurilor lungi.





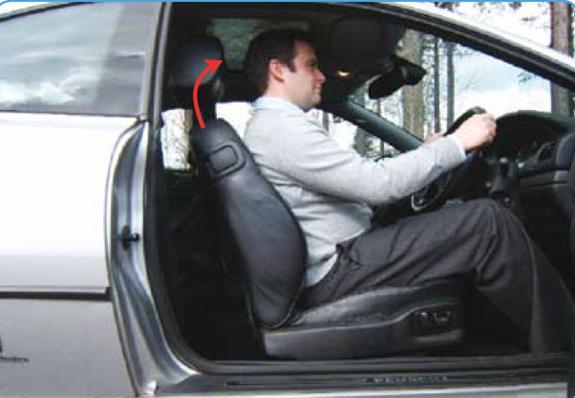
Acesti pasi nu se pot aplica la toate autoturismele deoarece nu toate au suport lombar sau posibilitatea de ajustare a scaunului pe inaltime, sau a volanului . Din aceasta cauza postura la volan va fi una incomoda . Asadar atunci cand cumparam o masina trebuie sa fim atenti la aceste reglaje pentru ca ele ne dau o calatorie confortabila , posibilitatea reglarii lor impiedica durerea de spate sa apara prematur.
John Rugh, VALR project leader a facut un studiu din care reiese ca sistemul de ventilatie al scaunelor aduce o economie de combustibil deoarece soferul nu mai simte nevoia acuta a sistemului de climatizare al autoturismului. Tot el spune ca daca toate masinile ar fi echipate cu acest sistem de ventilatie s-ar reduce consumul de combustibil cu 7.6% /an ceea ce la nivel mondial se traduce ca 1.97 billion litri de combustibil.
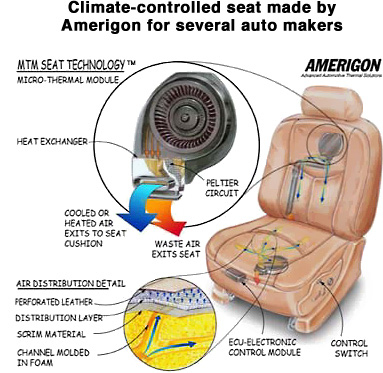
Sistemul de ventilatie nu este unul complex, el este alcatuit din ventilatoare dispuse pe spatarul si pe szutul scaunului care imprima in captuseala scaunului un flux de aer.
Acest flux de aer racoreste captuseala scaunului ceea ce duce la scaderea fluxului de aer rece dat de instalatia de climatizare sau chiar la inchiderea acesteia. Astfel se economiseste combustibil deoarece sistemul de ventilatie consuma mai putin curent ca instalatia de racire a autoturismului.
Pana in prezent acest sistem de ventialtie in scaun este prezent doar ca dotare optionala la marcile premium dar in scurt timp el se va implementa si la cele nonpremium si va ajuta la o economie de carburant si un confort sporit in timpul condusului pe temperaturi ridicate.
Un alt element de confort este incalzirea in scaun. Iarna este foarte folositor, incalzindu-se mult mai repede ca intreg habitaclul.
Sistemul de functionare este unul foarte simplu. Un grilaj de sarma subtire din cupru care se afla in captuseala scaunului, se incalzeste fiind parcursa de curent electric.Temperatura se poate seta de la un buton din consola centrala a autoturismului.


In imaginea de mai jos avem un termostat, legat la circuitul de incalzire, care dicteaza temperatura maxima setata si da comanda de orpire si pornire a circuitului de incalzire cand temperatura scade sub temperatura setata.
In functie de alegerea organelor din cavitatea abdominala, descrierea corpului uman poate cuprinde 65-70 corpuri rigide, legate cu arcuri neliniare si amortizoare (amortizoare cu aer), prin care este localizata rigiditatea si capacitatea de amortizare a viscerelor (intestinelor), muschilor, discurilor dintre vertebre, ligamente, tesut conjunctiv, etc.
Complexitatea structurii, descrierea anatomica si modelul matematic al corpului omenesc, au necesitat o simplificare care este aratata in urmatoarea fig.4.1. Astfel, modelul mecanic simplificat al omului stand asezat pe scaun pe o platforma, supus vibratiilor verticale este reprezentat in figura urmatoare:
Fig. 7.1
Fig.7.1. Model mecanic simplificat reprezentand corpul omenesc aflat asezat pe scaun pe o platforma care vibreaza vertical
Urmatoarele ipoteze (cu justificari) sunt facute in scopul prezentarii modelului acestui capitol:
a) Capul si atlasul (prima vertebra cervicala), datorita legaturilor care le leaga sunt combinate intr-un singur corp rigid, numit 'cap' si notat m1.
b) Deoarece masurarea miscarii relative dintre vertebre nu este perfectata pentru excitatia longitudinala a subiectilor, restul coloanei vertebrale (axa prin osul sacru) este combinat intr-un singur corp rigid, numit 'spate' si notat m2.
c) Pentru deformari mai mici decat cele care cauzeaza rupturi ale discurilor dintre vertebre, experienta arata ca rigiditatea si amortizarea in coloana vertebrala pot fi reprezentate prin arcuri liniare si amortizari liniare, notate k1 si c1 pentru sectiunea cervicala, si k2 si respectiv c2 pentru sectiunile toracica si lombara, in cazul transmiterii componentelor longitudinale ale fortelor prin discurile longitudinale si prin muschii respectivi. In continuare sunt incluse rigiditatea pelviana si amortizarea corespunzatoare.
d) Deoarece miscarea relativa dintre coaste, intre coaste si vertebrele toracice si intre cartilagiile costale si stern, pare a fi relativ mica, nesemnificativa pentru excitarea longitudinala a subiectilor, cavitatea toracica este combinata intr-un singur corp numit 'tors' si notat m3. Incluse in tors sunt si bratele si soldurile.
e) Rigiditatea si amortizarea torsului sunt reprezentate de un arc neliniar si un element de amortizare neliniara, notate k3 si respectiv c3, pentru transmiterea componentelor longitudinale ale fortelor in ligamentele care leaga coastele cu vertebrele.
f) Viscerele toracelui si abdomenului sunt considerate a fi trei corpuri rigide, numite: 'torace' (inima si plamanii), 'diafragma' (diafragma respiratorie) si 'abdomen' (ficat, stomac, rinichi, splina, fiere, aparat urinar, pancreas, intestine), notate m4, m5 si respectiv m6, cu rigitatea si coeficientii de amortizare ai toracelui si abdomenului reprezentate prin arcuri si elemente de amortizare neliniare. Acestea sunt notate k4 si c4 pentru torace si k6 si c6 pentru abdomen.
g) Restul corpului (pelvisul si picioarele) este considerat impreuna si numit 'pelvis' si notat m7.
h) Deoarece rigiditatea incheieturii creste odata cu deformarea, arcurile sunt considerate a fi tari.
Pentru a stabili modelul matematic MM-ISI (modelul matematic intrare-sta-re-iesire) corespunzator modelului mecanic reprezentat in Fig.1, cu forta perturbatoare aplicata asupra omului aflat asezat, pentru inceput scriem ecuatiile de echilibru pentru fiecare dintre cele 7 mase componente ale modelului mecanic (m1, m2, m3, m4, m5, m6, m7). Asupra acestora actioneaza mai multe forte, functie de legaturile existente intre ele.
Pentru stabilirea ecuatiilor diferentiale ce caracterizeaza miscarea modelului mecanic din fig.1, se considera fiecare dintre cele 7 mase separat:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Astfel, pentru modelul mecanic reprezentand un om asezat pe o platforma, se obtine urmatorul sistem de ecuatii diferentiale primare:
![]()
![]()
![]()
![]()
![]()
![]() (7.1)
(7.1)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
unde: ![]()
Scris sub forma matriceala, acest sistem de ecuatii diferentiale devine:
![]() , (7.2)
, (7.2)
unde:
 ;
;  ;
;
 ;
;
 ;
;
 ;
;  ;
;  ;
;
[AM] = matricea de inertie, [CM] = matricea de amortizare, [KM] = matricea de rigiditate, = vectorul deplasarilor, = vectorul vitezelor, = vectorul acceleratiilor, = vectorul fortelor perturbatoare.
Pentru a stabili MM-ISI aferent modelului mecanic din fig.7.1, mai intai transformam sistemul (7.1) astfel:
Pentru a stabili MM-ISI aferent modelului mecanic din fig.7.1, mai intai transformam sistemul (7.1) astfel:
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Pentru stabilirea MM-ISI aferent modelului mecanic din Fig.7.1, alegem ca
marime de intrare : ![]() , ca marimi de iesire: y1=z1(t)
, y2=z2(t), y3=z3(t) , y4=z4(t), y5=z5(t), y6=z6(t) si y7=z7(t), iar ca
marimi de stare:
, ca marimi de iesire: y1=z1(t)
, y2=z2(t), y3=z3(t) , y4=z4(t), y5=z5(t), y6=z6(t) si y7=z7(t), iar ca
marimi de stare:
![]()
![]() ,
,![]()
![]() ,
,![]()
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]()
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
MM-ISI al sistemului format din ecuatii de stare si ecuatii de iesire se obtine din ecuatiile primare care formeaza sistemul de ecuatii diferentiale (7.3), tinand cont de notatiile facute pentru marimile de intrare, stare si iesire:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
iar ecuatiile de iesire sunt:
y1=x1(t) , y2=x2(t), y3=x3(t) , y4=x4(t), y5=x5(t), y6=x6(t) si y7=x7(t) . Daca dorim sa scriem MM-ISI (7.3) sub forma matriciala, obtinem:
![]()
![]()
![]()
![]()
![]()
![]()
 (7.4)
(7.4)
unde: A este matricea de stare a sistemului,
xT= este vectorul de stare,
![]()
![]() C = 1 0 0 0 0 0 0 0 0 0 0 0 0 0
C = 1 0 0 0 0 0 0 0 0 0 0 0 0 0
0 1 0 0 0 0 0 0 0 0 0 0 0 0
0 0 1 0 0 0 0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 0 0 0
0 0 0 0 1 0 0 0 0 0 0 0 0 0
0 0 0 0 0 1 0 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0
Pentru a determina functia de transfer aferenta modelului mecanic aplicam transformata lui Laplace asupra marimilor care apar in ecuatiile sistemului (7.1), dupa ce in prealabil tinem cont si de ecuatiile (7.4). Astfel se obtine:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() (7.6)
(7.6)
![]()
![]()
![]()
![]()
![]()
![]()
S-a considerat ca modelul studiat are o marime de intrare si 7 marimi de iesire, functia de transfer H(s) este un vector:
 (7.7)
(7.7)
unde :
![]() ; cu i=1..7 .
; cu i=1..7 .
Hi(s) se pot obtine prin calcule pornind de la sistemul de ecuatii diferentiale (7.5), impartind fiecare din ecuatiile sistemului cu u(s) si tinand cont de relatia (7.7).
Se observa ca elementele modelului mecanic analizat sunt mase (m), resoarte (k) si elemente de amortizoare (c). Fiecare dintre acestea pot fi caracterizate de cate o functie de transfer deoarece transforma deplarile in forte sau fortele in deplasari, si in consecinta au cate o marime de intrare si una de iesire.
Astfel, pe baza modelului matematic (7.3) poate fi trasata o schema bloc informationala din care s-a dedus in continuare matricea de interconectare q. Matricea de interconectare are in cazul nostru 43 de linii (egal cu numarul de blocuri componente ale schemei bloc informationale studiate) si 6 coloane (5+1; 5 fiind numarul maxim de intrari intr-un bloc).
Functiile de transfer:
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() . (7.8)
. (7.8)
Matricea de interconectare este:
![]()
![]()
![]()
![]() q 1 0 0 0 0 0
q 1 0 0 0 0 0
2 -7 38 0 0 0
3 -6 36 0 0 0
4 -7 13 0 0 0
5 -6 10 0 0 0
6 1 2 3 4 5
7 6 0 0 0 0
8 7 -12 19 0 0
9 6 -11 18 0 0
10 8 9 0 0 0
11 10 0 0 0 0
12 13 0 0 0 0
13 10 0 0 0 0
14 13 -19 0 0 0
15 10 -18 0 0 0
16 -19 24 0 0 0
17 -18 22 0 0 0
18 14 25 16 17 0
19 18 0 0 0 0
20 19 -25 31 0 0
21 18 -23 30 0 0
22 20 21 0 0 0
23 22 0 0 0 0
24 22 0 0 0 0
25 24 0 0 0 0
26 24 -31 0 0 0
27 22 -30 0 0 0
28 -31 38 0 0 0
29 -30 36 0 0 0
30 26 27 28 29 0
31 30 0 0 0 0
32 31 -38 0 0 0
33 30 -36 0 0 0
34 -38 43 0 0 0
35 -36 41 0 0 0
36 32 33 34 35 37
![]()
![]() 37 6 -36 0 0 0
37 6 -36 0 0 0
38 36 0 0 0 0
39 7 -38 0 0 0
40 38 -43 0 0 0
41 40 42 0 0 0
42 36 -41 0 0 0
![]() 43 41 0 0 0 0
43 41 0 0 0 0
![]()
Programul de simulare scris in Mathlab, pentru analiza modelului mecanic, reprezentand un om asezat, functioneaza dupa acelasi scenariu ca si programul de simulare scris pentru modelul mecanic aferent omului aflat in picioare pe o platforma vibranta.
Pentru a realiza izolarea impotriva vibratiilor este necesar sa se interpuna un element elastic intre om si scaun si bineinteles un resort intre scaun si sasiu.
Un model mecanic corespunzator asezarii unui om pe scaunul unui autovehicol, de exemplu un tractor este reprezentat in urmatoarea figura:
Fig. 7.2 Model mecanic ocupant-scaun_tractor
Deasemenea, legatura dintre scaun si sasiu poate fi modificata, de exemplu poate fi un scaun cu suspensie de relaxare sau alte variante, situatii in care legatura precizata mai sus trebuie modelata corespunzator (apare si elementul de amortizare vascoasa).
Pentru simularea comportarii modelului mecanic din figura 7.2 se completeaza sistemul de ecuatii diferentiale primare (7.1) cu inca doua ecuatii, si anume:
![]()
![]() ,
,
se poate construi o schema bloc informationala si apoi, pe baza interconexiunilor dintre blocurile componente ale acesteia se poate trece la scrierea unui program Mathlab de simlare.
Odata cu dezvoltarea industriei constructoare de automobile, pe langa cresterea performantelor tehnice ale acestora, respectiv dezvoltarea motoarelor, ale transmisiilor, a aerodinamicii caroseriilor, ale sistemelor electronice (computer de bord), sau ale elementelor de siguranta pasiva, producatorii de automobile insista din ce in ce mai mult asupra confortului soferului si al pasagerilor, respectiv asupra ergonomiei habitaclului.
Elementele care definesc confortul soferului si al pasagerilor, respectiv ergonomia habitaclului sunt:
pozitionarea
confortabila a scaunului soferului si al pasagerului
(pe verticala sl pe orizontala) printr-un efort minim, de
exemplu
prin apasarea unui buton la indemana
- scaune incalzite
- comenzi ale masinii ia indemana (pe volan), etc.
Mecanismul de pozitionare pe verticala se concepe si se adapteaza scaunului soferului si pasagerului, in functie de dimensiunile acestuia, in timp, dimensiunile si forma scaunelor soferului si al pasagerului au fost concepute pe baza unor studii asupra unui esantion reprezentativ de persoane, care au permis obtinerea urmatoarelor caracteristici ergonomice:
- Dimensiunile principale ale persoanelor necesare conceperii si proiectarii scaunului.
-
Latimea toracelui persoanei: intre 280 si 460 mm
- inaltimea bustului persoanei: intre 800
si 960 mm
- Greutatea persoanei: intre 47 si 100 kg
- Unghiuri pentru asigurarea unei pozitii confortabile a persoanei
(figura 8.1):
20° < αj < 30°, 95° <
< 120°, 20° < < 135°, 86°
<
< 105°,
0° < <
45°, 80° < < 170°, 170°
< <
190°
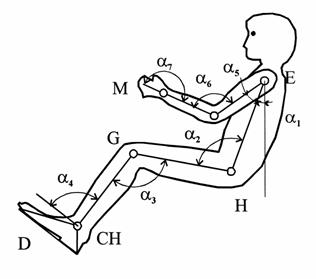
Figura 8.1.
In continuare conceperea formei si dimensionarea mecanismului pentru pozitionare pe verticala a scaunului soferului si al pasagerului se va face prin referire la punctul H (figura 1.1)
Zona de amplasare a punctului H, raportata la scaunul soferului se face astfel incat unghiul de vizualizare in fata al acestuia, sa fie unul corespunzator (figura 8.2).
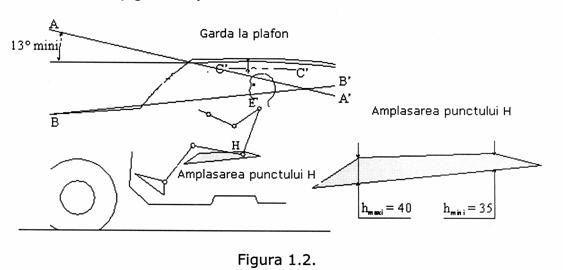
Pozitionarea soferului pe scaun, in postul de conducere, se realizeaza prin intermediul urmatorilor factori (figura 8.3, tabelul 8.1)
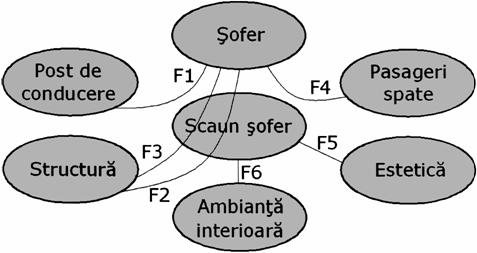
Figura 8.3
Asezarea soferului in postul de conducere este asigurata de urmatoarele functii (figura 8.4)
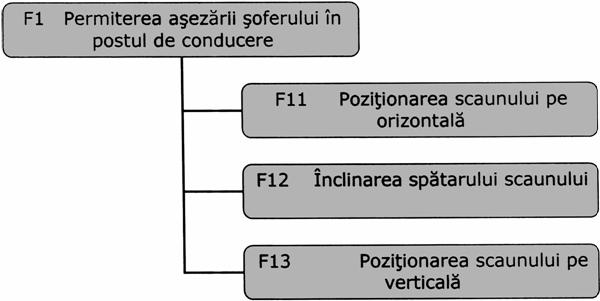
Figura 8.4
La marea majoritate a modelelor de autoturisme, functiile F11, F12 si F13 sunt asigurate de lanturi cinematice simple, cu posibiliate de schimbare a sensului de miscare. Mecanismele cu actionare motorizata, care asigura aceste functii sunt amplasate de obicei in structura scaunului. De aceea Ia proiectarea acestor mecanisme trebuie sa se tina searro de conditiile de gabarit si montaj in raport cu scaunul.
In continuare se va prezenta componenta si functionarea mecanismului care va asigura functia F11
Raportat la gabaritul scaunului soferului si al pasagerului, mecanismul de pozitionare al scaunului pe verticale este compus din urmatoarele subansamble (figura 8.5).
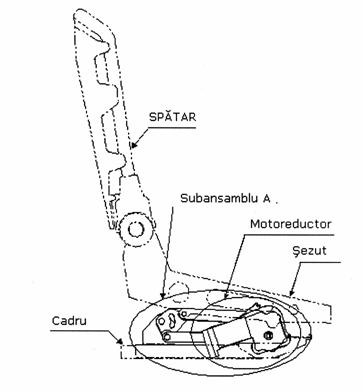
Figura 8.5. Subansamblele mecanismului
motoreductor, (motor
electric - angrenaj melc roata melcata)
asigura antrenarea mecanismului de pozitionare
al scaunului (este
legat de subansamblu! A)
Subansamblul A, situat in partea dreapta a scaunului, este
compus dintr-un tren de roti dintate si un
mecanism plan cu bare
articulate
Subansamblul B, situat in partea stanga a scaunului,
compus
dintr-un mecanism plan cu bare articulate identic cu cel din
subansamblul A (nevizibil in figura 8.5)
Cele doua pozitii extreme ale mecanismului de pozitionare, cu raportare la punctul H sunt prezentate in figura 8.6.
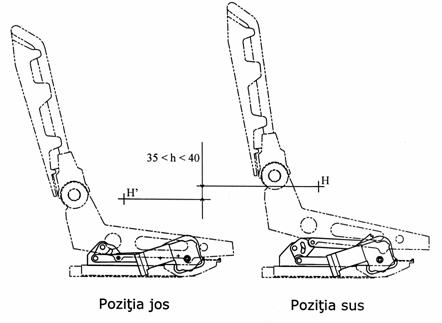
Figura 8.6. Pozitiile extreme ale mecanismului
8.1.4. Componenta si functionarea motoreductorului
Schema cinematica a motoreductorului este prezentata in figura 8.7.
Caracteristici motor electric de antrenare
Putere: 55 W
Turatia: 3000 rot/min
Inaltimea de ridicare: h = 38 mm
Alimentarea motorului electric este asigurata prin intermediul a doi papuci (1) conectati Ia reteaua electrica a autovehiculului. Energia electrica este "vehiculata' prin intermediul periilor (2) in contact cu colectorii rotorului (16). in prezenta unei tensiuni electrice ia nivelul periilor motorul se va antrena in miscare de rotatie. Prin inversarea tensiunii se va schimba sensul miscarii de rotatie.
De rotorul (16) al motorului electric este cuplat un arbore melcat, care angreneaza cu roata melcata (17). Prin intermediul pieselor 18, 19, 20, 32 roata melcata antreneaza in miscare de rotatie (ia aceeasi turatie) pinionul 21, care este elementul conducator al trenului de roti dintate din componenta subansamblului A.
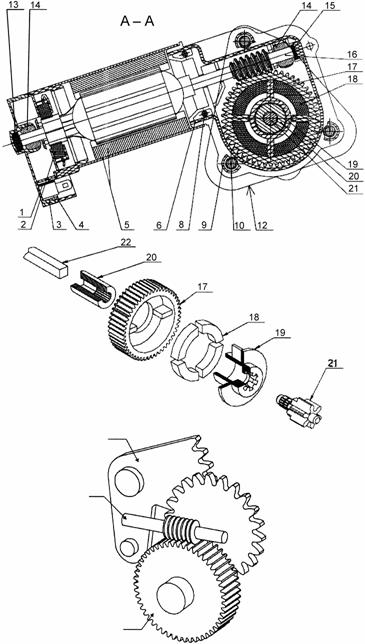
Figura 8.1.7. Schema cinematica a motoreductorului de antrenare
prezentata in figura 8.1.8. O vedere tridimensionala a trenului de roti dintate cilindrice este prezentata in figura 8.9.
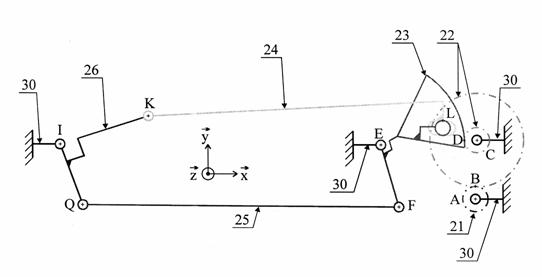
Figura 8.9
Rotile dintate cilindrice din componenta trenului au toate axele de rotatie fixe, Pinionul (21) preia miscarea de rotatie de la roata melcata (17), din componenta motoreductorului, si o transmite rotii dintate din componenta subansambiuiui (22). Pinionul din componenta subansamblului (22) angreneaza cu sectorul dintat (23) care este de fapt manivela mecanismului plan de pozitionare pe verticala al scaunului. Miscarea este transmisa in continuare prin intermediul elementelor cinematice ale mecanismului, biela (25) si balansierul (26), la biela port - scaun (24). Punctul H, legat de biela port scaun (24) trebuie sa aiba o traiectorie rectilinie verticala» Mecanismul plan de pozitionare al scaunului are in componenta sa numai cuple cinematice de rotatie, de clasa a V -a, din care cuplele E si Q asigura legatura cu elementul fix (cadrul -30)
Pentru evitarea socurilor la ridicarea si coborarea scaunului mecanismul de pozitionare este prevazut cu un arc spiralat, montat intre cuplele I si Q (figura 8.10).
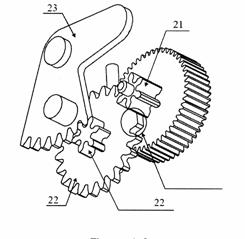
|
Figura 8.10 |
In teoria mecanismelor si a masinilor sinteza are drept scop determinarea parametrilor geometrici si cinematici impusi de tema de proiectare.
Tema de proiectare poate fi extrem de complexa, in functie miscarea pe care trebuie sa o realizeze mecanismul ce trebuie realizat.
Un proiect complet cuprinde urmatoarele etape:
stabilirea schemei
cinematice optime pentru realizarea legii de
miscare a elementului condus.
determinarea diagramelor de
variatie a fortelor pentru ca pe baza
lor sa se realizeze forma constructiva a
mecanismului, capabila sa
efectueze in conditii optime procesul (miscarea)
impus.
In cele doua etape, problemele pe care trebuie sa le rezolve proiectantul sunt destul de numeroase si in acelasi timp complexe.
determinarea parametrilor pentru transmiterea miscarii de
elementul conducator ia cel condus
determinarea parametrilor geometrici ai mecanismului pentru
realizarea unei anumite forme de transformare a
miscarii de la
elementul conducator la cel condus (manivela - balansier,
manivela - culisa rotativa, manivela - culisa oscilanta, dublu
balansier, dublu manivela, etc)
determinarea pozitiilor
de extrem in conditiile evitarii unghiurilor
de presiune maxime, impuse de procesul tehnologic
stabilirea ansamblului mecanismului pentru evitarea depasirii
gabaritului fixat de tema de proiectare.
Problemele de sinteza geometrica din teoria mecanismelor se pot pune in primul rand din punctul de vedere al realizarii transformarii unei miscari (a elementului conducator) intr-o miscare tip impusa de procesul (miscarea), elementului condus. Din acest punct de vedere se pot realiza 16 variante de mecanisme, prezentate in tabelul 8.1.
Tabelul 8.1
|
Clasa |
Miscarea elementului conducator |
Miscarea elementului condus |
Exemple |
|
|
Miscarea rectilinie continua |
Rectilinie continua |
Parghii si roata articulata |
|
|
Rectilinie alternativa |
Roata hidraulica |
|
|
|
Circulara continua |
Troliul, scripete,cricul |
|
|
|
Circulara alternativa |
Pendulul |
|
|
|
Miscare rectilinie alternativa |
Rectilinie continua |
Masini de extractie cu ascensoare |
|
|
Rectilinie alternativa |
Parghii |
|
|
|
Circulara continua |
Mecanism piston manivela |
|
|
|
Circulara alternativa |
Mecanisme cu culisa oscilanta |
|
|
|
Miscare circulara continua |
Rectilinie continua |
Laminoare |
|
|
Rectilinie alternativa |
Mecanismul manivela-piston |
|
|
|
|
Circularacontinua |
Transmisii cu element flexibil |
|
|
Circulara alternativa |
Mecanismul balansier manivela |
|
|
|
Miscare circulara alternativa |
Rectilinie continua |
Pendulul |
|
|
Rectilinie alternative |
Mecanismul cu culisa oscilanta |
|
|
|
Circulara continua |
Mecanismul balansier manivela |
|
|
|
Circulara alternativa |
Mecanismul dublu balansier |
o alta gama de probleme este conditia impusa unuia din
elementele mecanismului, ca o portiune din planul
sau sa treaca
prin anumite pozitii impuse de procesul tehnologic
(2,3,4, sau 5
pozitii)
in sfarsit procesul
tehnologic poate cere ca un punct din elementul
condus sa parcurga in timpul ciclului cinematic o anumita
traiectorie.
In functie de conditiile initiale impuse prin tema de proiectare, si avand in vedere cele prezentate mai sus, proiectantul va trebui sa aleaga una din variantele (clasele) de mecanisme prezentate in tabelul
Instrumentul matematic a aratat ca, de exemplu, o traiectorie impusa unui punct din planul bielei unui mecanism patrulater este echivalenta in cazul cei mai general unei curbe de gradul 6 (curba biela), cu multiplele ei variante, rezolvarea problemei fiind intotdeauna legata de grafice. De aceea primele metode de sinteza au fost ceie grafice. Odata cu dezvoltarea tehnicii de calcul (hard, soft) au aparut inevitabil si metodele analitice, care nu au facut si nu fac nici in prezent altceva decat sa confirme si sa desavarseasca precizia rezultatului calcului grafic.
Din acest motiv primul pas in sinteza mecanismelor plane articulate este de rezolvare a unei probleme de geometrie a mecanismului plan articulat.
Conditia de existenta a manivelei (Teorema iui Grashof)
Se pune urmatoarea problema: Care trebuie sa fie relatiile metrice (lungimile) intre elementele unui mecanism patrulater astfel incat unul din cele doua elemente legate la baza sa efectueze o miscare de rotatie continua (manivela) in timp ce celalalt element articulat la baza (balansier) sa efectueze o miscare oscilanta.
Se stie ca bara AB opusa
elementului fix (baza A0B0) care are ambele articulatii mobile se numeste biela (figura 8.2.1),
iar celelalte doua bare (elemente cinematice)
articulate la baza si biela se numesc manivela A 0A atunci vand
executa o rotatie de 360 grade in timpul unui ciclu
cinematic si balansier B![]() B
cand in acelasi ciclu executa o oscilatie intre doua pozitii extreme.
B
cand in acelasi ciclu executa o oscilatie intre doua pozitii extreme.
In figura 8.2.1. este reprezentat un mecanism patrulater manivela -balansier in cele doua pozitii extreme, A0AI BI Bo, A0 AII BII B0.
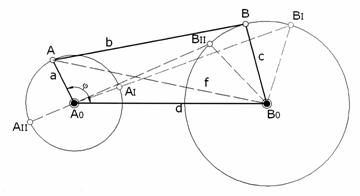
|
Figura 8.2.1. |
Pentru ca acest tip de mecanism sa existe este necesar ca in orice pozitie A0A a manivelei - in cazui de fata determinata de ungbiu! ce-! face cu baza A0B0 - sa fie posibila constructia pozitiei articulatiei B. Dar
AB![]() =f2=a2
+ d2-2ad cosφ (8.2.1)
=f2=a2
+ d2-2ad cosφ (8.2.1)
unde s-a notat:
AB0 = f; A0A = a; A0B0 = d; AB = b; B0B = c
Existenta articulatiei B este conditionata de indeplinirea inegaiitatii:
|b - c| ![]() f
f ![]() (b
+ c)
(b
+ c)
Care ridicat la patrat devine:
(b-c)2
![]() f2
f2![]() (b + c)2
(b + c)2
inlocuind valoarea Iui f din relatia (2.1) rezulta:
a2+d2-2ad cosφ![]() (b + c)2
(b + c)2
a2+d2-2ad cosφ ![]() (b-c)2
(b-c)2
Cea nai rnare valoare a membrului intai din relatia 8.2.2 are Ioc pentru cosφ = -1 (φ = 180°), iar cea mai mica valoare a membrului intai din relatia 8.2.3, pentru cosφ = 1 (φ = 0; 360°). La limita cele doua inegalitati devin:
a2 + d2 + 2ad ![]() (b
+ c)2 a2 + d2 -2ad
(b
+ c)2 a2 + d2 -2ad![]() (b -c)2
(b -c)2
Prima inecuatie se poate scrie:
(a + d)2 ![]() (b + c)2 sau a + d
(b + c)2 sau a + d![]() b + c (8.2.4) Cea de a doua inecuatie se poate scrie:
b + c (8.2.4) Cea de a doua inecuatie se poate scrie:
(a - d)2 - (b - c)2![]() 0 sau (a - d - b + c)(a - d + b - c)
0 sau (a - d - b + c)(a - d + b - c) ![]() 0
0
Aici exista doua cazuri: Cazul I: (8.2.5)
a-d-b+c![]() 0 a
-d+b- c
0 a
-d+b- c ![]() 0
0
Din inecuatiile (8.2.4) si (8.2.5) rezulta:
a + d ![]() b + c
b + c
b + d![]() a + c (8.2.6)
a + c (8.2.6)
c + d ![]() a + b
a + b
Care adunate doua cate doua, rezulta:
d ![]() a; d
a; d![]() b;
d
b;
d ![]() c
c
Rezulta ca lungimea d a bazei trebuie sa fie cea rnai scurta dintre toate ceie patru elemente. Curn sistemul (8.2.6) este simetric fata de a si c, in cazul in care este respectata inegalitatea d < b < c < a mecanismul patrulater este dubla manivela (figura 8.2.2).
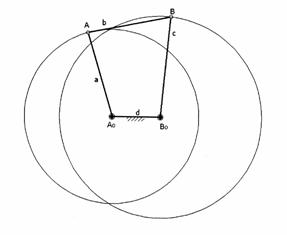
Figura 8.2.2
Cazul II:
a-d-b+c![]() 0 a-d + b-c
0 a-d + b-c
![]() 0
0
Din inecuatiile (8.2.4) si (8.2.7) rezulta:
a + d ![]() b + c
b + c
a + c ![]() b + d
b + d
a + b ![]() d + c
d + c
In acest caz lungimea elementului a trebuie sa fie cea mai mica. Cum sistemul nu este simetric fata de a si c, rezulta ca numai elementul a este manivela, iar c balansier, adica mecanismul patrulater articulat este unul manivela - balansier (figura 8.2.1.)
Daca insa cel mai scurt element este biela, atunci mecanismul este unu! dublu balansier(figura8.2.3).
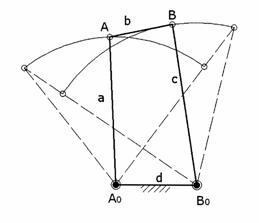
Figura 8.2.3
Cazuri particulare de mecanisme patrulater articulat
- mecanismul patrulater Gallowey (a = d < b = c), figura 8.2.4.
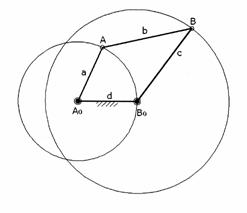
Figura 8.2.4
- mecanismul patrulater manivela - balansier simetric (a = b < c = c), figura 8.2.5
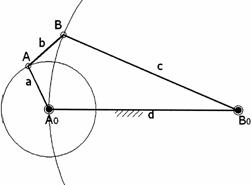
|
Figura 8.2.5 |
- mecanismul parallelogram (a = c ≠ b = d),
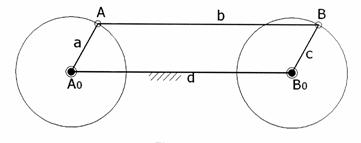
figura 2.6.
- mecanismul antiparalelogram(a = c ≠ b = d),
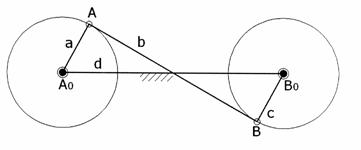
figura 8.2.7.
Date de proiectare:
- cursa de ridicare a scaunului - h = 38 mm
- timpul de ridicare al scaunului (din pozitia minima in cea maxima)-t = 3,1s
- masa soferului si a mecanismului - m = 120 kg
- acceleratia gravitationala (pentru greutatea proprie a mecanismului - g = 9,81 m/s2)
Avand in vedere miscarea pe care va trebui sa o execute scaunul in miscarea de ridicare, respectiv coborare, mecanismul cel mai indicat pentru realizarea acestei miscari este patrulaterul articulat. Mecanismul de pozitionare a! scaunului soferului va fi compus dintr-un mecanism de baza (patrulaterul articulat) si un element cinematic, respectiv doua cuple cinematice pasive. Elementul cinematic pasiv va fi o biela port-scaun, pe ea se va monta efectiv scaunul, dar va avea si rolul de a consolida (cresterea rigiditatii) mecanismul.
Deoarece in miscarea de ridicare, respectiv coborare scaunul soferului montat pe biela port-scaun si implicit bie!a principala a mecanismului patrulater articulat propus, nu trebuie sa se roteasca fata de orizontala (pentru a nu se crea schimbarea pozitiei soferului in scaun), rezulta ca cele doua biele, care evident vor avea miscari identice, vor trebui sa aiba pozitii paratele cu ele insele in fiecare pozitie discreta din timpui ciclului cinematic. O astfel de miscare pentru biela mecanismului patrulater articulat este asigurat de un mecanism paralelogram articulat, Schema cinematica a mecanismului paralelogram articulat este prezentata in figura 8.2.8.
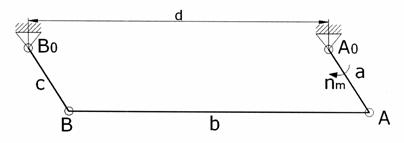
Figura 8.2.8. Schema cinematica a paralelogramului articulat
Din considerente de gabarit si montaj
s-au adoptat in mod constructiv urmatoarele dimensiuni
geometrice ale mecanismului de baza. Evident ne aflam in cazul: a = c![]() b
= d (figura8. 2.6)
b
= d (figura8. 2.6)
lungimea elementului A0A- a = 35 mm
lungimea elementului B0B - c = 35 mm
lungimea bielei AB - b = 170 mm
distanta dintre articulatiile Ao, Bo - d = 170 mm
Pe baza dimensiunilor geometrice de mai sus ne aflam in cazul II al teoremei lui Grashof, adica manivela este cel mai scurt element a! mecanismului si tinand seama de faptul ca a = c, mecanismul paralejogram este unul dubla manivela.
in figura 8.2.9 este prezentata schema cinematica a mecanismului complet pentru pozitionarea scaunului soferului. Ambele elemente cinematice in miscare de rotatie vor fi din punct de vedere constructiv, sub forma unor parghii cotite.
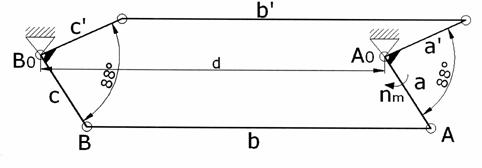
|
Figura 8.2.9 |
Tot din considerente de gabarit si montaj s-au adoptat in mod constructiv si celelalte dimensiuni geometrice ale mecanismului de pozitionare:
pentru manivelele cotite: a ́ = 50 mm
c' = 50 mm
lungimea bielei port - scaun: b' = b = 170 mm
Din considerente de gabarit si spatiu de amplasament (mecanismul trebuie sa incapa sub scaunul soferului, pe o inaltime de max. 100 mm) mecanismul de pozitionare al scaunului s-a reprezentat, la scara, in pozitia extrema corespunzatoare pozitiei celei mai de sus a scaunului (figura 8.2.10). in acest sens avem urmatoarele dimensiuni de gabarit a mecanismului, s-a tinut seama si de faptul ca mecanismul va fi prevazut cu un mecanism de actionare format din transmisii prin roti dintate:
inaltimea
maxima a mecanismului (distanta maxima dintre cele
doua biele) - 48,5 mm
unghiul de pozitie al
elementului conducator AoA, corespunzator
acestei pozitii - 70 grade
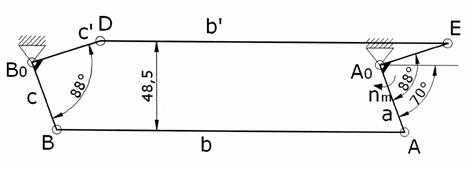
Figura 8.2.10
Unghiul de rotatie al elementului conducator (AoA) si implicit al elementului condus (B0B) s-a determinat in conditiile in care mecanismul cu schema cinematica propusa (figura 8.2.10), realizeaza o cursa de ridicare completa (sau coborare), conform temei de proiectare, h = 38 mm, figura 8.2.11. Ca punct de reper poate fi considerat orice punct al bielei port - scaun, de exemplu cupla D sau E.
Etapele de realizare a sintezei mecanismului de pozitionare:
s-a reprezentat mecanismul la
scara in pozitia de extrem maxim
(figura 8.2.10)
fata de cupla E s-a reprezentat o dreapta ia 38 mm,
corespunzatoare pozitiei de extrem minim
(pozitia bielei port -
scaun)
traiectoria punctului E (un
cerc) intersecteaza dreapta in punctul
E1
din conditiile geometrice adoptate (traiectorie si geometrie
eiement cotit) se determina pozitia punctului A1
in mod similar se determina pozitiile punctelor B1 si D1.
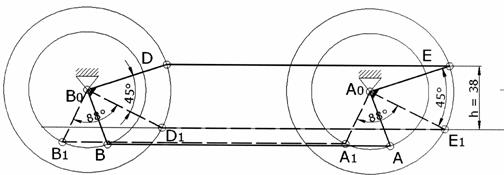
Figura 8.2.11
Mecanismul reprezentat in pozitia E1A0A1B1B0B1 reprezinta pozitia extrema de minim a acestuia. Prin masurarea (cotarea) unghiului dintre cele doua pozitii extreme ale elementului conducator, rezulta unghiul de rotatie al acestuia, necesar realizarii cursei mecanismului, impusa prin tema de proiectare.
Unghiul de rotatie al elementului conducator - 45 grade Mecanismul devine dub!u balansier
Determinarea turatiei elementului conducator:
Se cunosc:
unghiul de rotatie φ = 45 grade
durata ciclului cinematic -t =3,1 s (impusa prin tema de proiectare)
Viteza unghiulara;
![]() =
= 
![]()
![]()
Turatia:
![]()
Pentru antrenarea mecanismului de pozitionare al scaunului se propune un lant cinematic format dintr-un motor electric si o transmisie prin roti dintate.
Prin terna de proiectare caracteristicile motorului electric sunt:
Puterea; P = 55 W
Turatia: nM = 3000 rot/min
Pentru asigurarea legaturii dintre iantu! cinematic de antrenare si mecanismul de pozitionare al scaunului, elementul conducator al acestuia (A0A) va fi de forma unui sector dintat (figura 2.12).
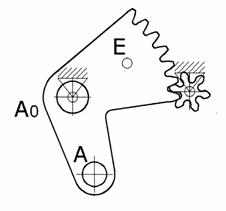
Figura 8.2.12
Raportul de transmitere al transmisiei cu roti dintate:
![]()
Raportul de transmitere rezultat este unul foarte mare si este destul de dificil sa se realizeze doar cu transmisii prin roti dintate cilindrice (ar fi nevoie de 200 - 300 trepte de angrenare),
Se poate utiliza insa, cel putin pe treapta o transmisie melc -roata melcata, care are proprietatea ca in conditii de gabarit redus, asigura un raport de transmitere foarte mare (de ordinul zecilor).
in acest sens mecanismui de antrenare va fi format din trei trepte de angrenare, unui melc-roata rneicata si doua cu roti dintate cilindrice. Schema cinematica este prezentata in figura 8.2.13, respectiv in figura 8.
Rapoartele de transmitere pe cele trei trepte de angrenare se determina dupa cum urmeaza:
i = im-i1-i2=1250
Se vor adopta urmatoarele valori (standardizate): Pentru treapta melcata: im = 80
Prima treapta cilindrica: i1 = 3,15
A doua treapta cilindrica; i2 = 5
Raportul de transmitere efectiv devine:
Ief = im ∙i1 i2
Eroarea fata de raportul de transmitere real:
![]()
Eroarea relativa a raportului efectiv fata de cel real se incadreaza in limitele admise (max 3%), deci se pot accepta valorile rapoartelor de transmitere partiale.
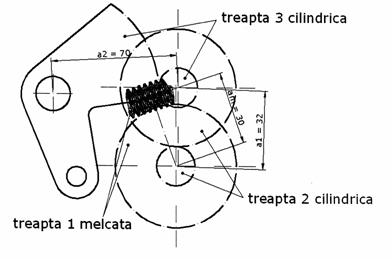
Figura 8.2.13
Distantele dintre axeie celor trei trepte de angrenare s-au impus din conditii de gabarit si montaj, astfel:
Pentru treapta melcata: am = 30 mm
Prima treapta cilindrica: a1 = 32 mm
A doua treapta cilindrica: a2 = 70 mm
Figura 8.2.14
Analiza mecanismelor plane a cunoscut o continua evolutie de a lungul timpului. Astfel in practica sunt cunoscute mai multe metode de analiza a mecanismelor plane (pozitionala, cinematica, cinetostatica sau dinamica), respectiv cele grafice, grafoanalitice si analitice fiecare din ele avand avantaje si dezavantaje.
Metodele grafice si cele grafoanalitice (metoda ecuatiilor vectoriale, proiectiilor, centrului instantaneu de rotatie, asemanarii, respectiv metoda poligonului fortelor, etc), au avantajul ca sunt foarte usor de utilizat, necesita un volum de munca relativ redus, insa precizia rezultatelor nu este intotdeauna cea dorita, datorita erorilor de masurare din planul grafic.
Metodele analitice (metoda conturului poligonal) presupun scrierea proiectiilor ecuatiilor de contur si derivarea succesiva a acestora, respectiv a ecuatiilor de echilibru, rezultand sisteme de ecuatii liniare care trebuie rezolvate pentru cat mai multe pozitii a!e elementului conducator. Volumul de munca este foarte mare, fiind necesara rezolvarea sistemelor de ecuatii cu ajutorul unor programe scrise in diverse limbaje de programare, insa precizia rezultatelor este ridicata. Aceasta metoda are dezavantajul ca necesita cunoasterea unui limbaj de programare.
Odata cu dezvoltarea aplicatiilor de tip CAD (Computer Aided Design), companiile producatoare de software au dezvoltat pachete de programe specifice fiecarui domeniu al ingineriei. Astfel pentru modelarea si simularea sistemelor mecanice, sunt cunoscute mai multe aplicatii cum ar fi: Mecapian,SolidWorks, Solid Edge, Algor, Adams, WorkingModel, SAM51, Catia, Watt&Robetts, etc. unele din acestea efectuand calcule si prin metoda elementului finit.
in continuare in paragrafele urmatoare se va prezenta modelarea, analiza si simularea mecanismului pantograf cu ajutorul programului SAM51.
Pentru analiza se va lua in considerare doar mecanismul de baza , paralelogram articulat. Mecanismul studiat este prezentat in figura 8.3.1, si are urmatoarele caracteristici tehnice (din tema de proiectare), respectiv dimensiuni geometrice (rezultate in urma sintezei):
Figura 8.3.1. Schema cinematica a mecanismului de pozitionare
inaltimea de ridicare - 38 mm
timp de ridicare scaun - 3,1 s
timp coborare scaun - 3,1 s
unghiul de rotatie al elementului conducator - 45 grade
incarcarea mecanismului - 1200 N + greutatea proprie
Dimensiunile geometrice ale elementelor cinematice componente:
I1 = 35 mm
I2 = 170 mm
l3 = 35 mm
I4 = 50 mm
l5 = 50 mm
distanta dintre reazemele 1 si 4 - 170 mm
Analizand schema cinematica a mecanismului (fig.8.3.1.) se pot specifica urmatoarele:
Mecanismul se compune din
trei elemente cinematice mobile, 1+5, 2,
3+4 (elementele 3 si 4, respectiv 1 si 5 sunt
rigidizate una fata de
cealalta, pastrandu-se constant unghiul relativ
dintre ele).
Mecanismul se compune din
patru cuple cinematice de clasa V (C5),
1,2,3,4, cupla 5 si 6 ne avand rol cinematic
(asigura legatura cu biela
port - scaun)
Mecanismul poate fi considerat plan, deci va avea familia egala cu trei.
Astfel:
f = 3
n = 3
C5 = 4 =>
Numarul gradelor de mobilitate al mecanismului:
M = 3n-2C5
Numarul gradelor de mobilitate fiind egal cu 1, mecanismul de pozitionare este bine definit, adica fiecarei pozitii ale elementului conducator (1) corespund pozitii bine determinate ale celorlalte elemente cinematice,
Pozitiile extreme ale mecanismului de pozitionare
Pozitiiie extreme ale mecanismului de pozitionare sunt prezentate in figura 8.3.2. si se are in vedere ca cursa de ridicare a scaunului este de 38 mm, respectiv unghiu! de rotatie ai elementului conducator este de 45 grade
Astfel unghiul de pozitie ai elementului conducator (1) in pozitia de maxim a mecanismului este (scaun ridicat):
φ1max grd
Figura 8.3.2. a
Unghiul de pozitie al mecanismului in pozitie de minim este (scaun coborat):
φ1min = 65 grd
Figura 8.3.2. b
Pozitiiie extreme ale mecanismului de pozitionare
Analiza cinematica a mecanismului de pozitionare cu ajutorul programului SAM51 se va realiza pentru ciclul cinematic de ridicare al scaunului, considerat mai solicitant decat ciclul de coborare si presupune parcurgerea urmatoarelor etape.
- modelarea mecanismului: mecanismul se va modela in pozitia extrema de minim, pe baza coordonatelor cuplelor cinematice, rezultate in urma sintezei geometrice (figura 3.2. b): Cupla 1 - Ao (125.37,22.55) Cupla 2 - A (110,58,-9,17) Cupla 3 - B (-59,42, -9,17) Cupla 4 - Bo (-44,63,22.55) Cupla 5 - D(0,0) Cupla 6 - D (170,0)
- specificarea miscarii de antrenare a mecanismului Miscarea de antrenare a mecanismului va fi una de rotatie uniforma in cupla cinematica 1 (acceleratia unghiulara ε1 = 0), conform figura 8.3.3 (pentru ridicare - unghi de rotatie 45 grade, timpul ciclului cinematic 3,1 s).
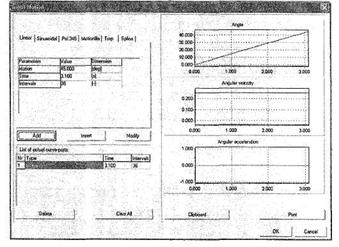
Figura 8.3.3. Miscarea de antrenare a mecanismului
analiza cinematica propriu zisa. Se urmareste obtinerea sub forma grafica a variatiilor marimilor cinematice ale elementelor cinematice componente in intervalul de timp in care se realizeaza cursa de ridicare completa a scaunului, astfel:
Pentru elementul conducator 1+5
Conform graficelor din figura 8.3.3, marimile cinematice sunt conforme cu realitatea.
unghiul de pozitie al elementului
A(1)variaza intre:-114,998![]() -69,998
-69,998
Unghiul de rotatie: -114,998+96,998 = 45 grade
viteza unghiulara: AV(1) = 0,253 rad/s = const.
acceleratia unghiulara: AA(1) = 0
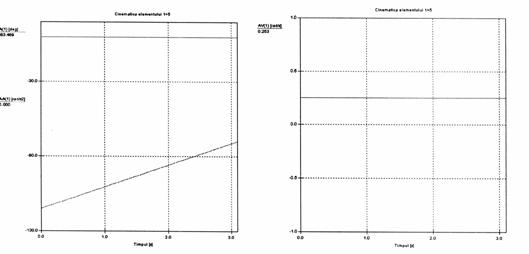
Figura 8.3.4. Cinematica elementuiui cotit 1+5
Pentru elementul cinematic 2 (biela principala a mecanismului):
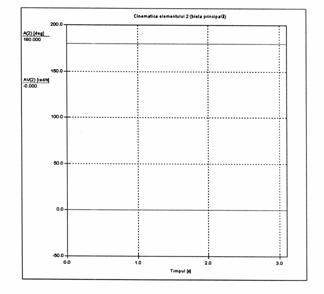
Figura 8.3.5. Cinematica elementului 2
Conform graficeior din figura 8.3.5, avem urmatoarele marimi cinematice:
unghiul de pozitie al
elementului este constant - 180 grade, rezulta ca
elementul in miscare plan paralela nu are
componenta de rotatie, la fel
si biela port scaun care are aceeasi miscare, deci scaunul nu se
va roti
in timpul ridicarii.In consecinta:- viteza unghiulara; AV(2) = 0 rad/s.
acceleratia unghiulara: AA(2) = 0
|
Pentru elementul cinematic cotit 3+4 : |
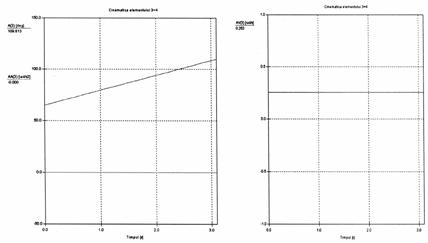
Figura 8.3.6. Cinematica elementului 2
Conform graficelor din figura 8.3.6, avem urmatoarele marimi cinematice
unghiul de pozitie al
elementului A(3) variaza intre: 65,002 ![]() 110,002
110,002
Unghiul de rotatie: 65,002 - 110,002 = 45 grade
viteza unghiulara: AV(3) = 0,253 rad/s.
acceleratia unghiulara: AA(3) = 0
Rezulta ca elementul cotit are o miscare identica cu cea a elementului cotit conducator, ceea ce este in conformitate cu realitatea (mecanismul paralelogram).
Cinematica cuplei D - E
Cuplele cinematice D, respectiv E fac parte din componenta bielei port - scaun. Miscarea acestora, este identica cu miscarea oricarui punct de pe biela port - scaun, deci si cu miscarea bielei port - scaun, datorita naturii miscarii acesteia (biela principala a mecanismului),
Conform graficelor din figura 8.3.7, rezulta urmatoarele marimi:
deplasarea pe
verticala: y(5) 0 4![]() 38
mm, conforma cu cerintele din
38
mm, conforma cu cerintele din
tema de proiectare - deplasarea pe verticala a
scaunului - 38 mm
viteza absoluta: v_abs(5) = 12,669 mm/s = const
acceleratia absoluta: a_abs(5) = 3,210 mm/s2
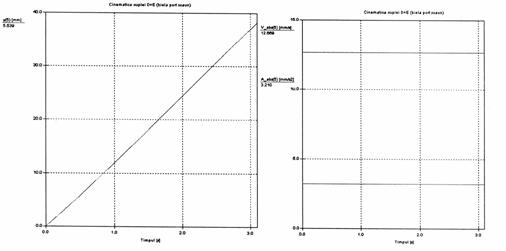
Figura 8.3.7. Cinematica cuplei D - E
Traiectoriile cuplelor D - E sunt prezentate in figura 8.3.8
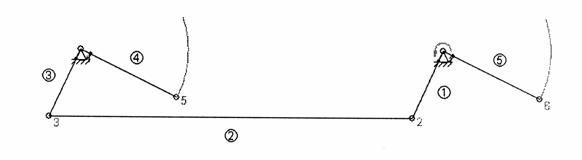
Figura 8.3.8
Analiza cinetostatica a mecanismului de pozitionare presupune parcurgerea urmatoarelor etape:
stabilirea incarcarii exterioare a mecanismului (figura 3.9) - se
considera forta care incarca mecanismul, F
= 1200 N, distribuita pe
biela port - scaun, prin cele
doua cuple marginale ale acestora.
in cupla D: F = 600 N
in cupla E: F = 600 N
- definirea maselor, a momentelor de inertie si a pozitiei centrelor de greutate pentru fiecare element cinematic - se va realiza individual pentru fiecare element in parte conform figura 8.3.10. Desielementele cinematice nu au mase considerabile, in calcule se vor lua in considerare si fortele de greutate ale acestora. Pentru simplificare centrele de greutate vor fi pozitionate la jumatatea lungimii elementelor, iar momentul de inertie in jurul unei axe ce trece prin centrul de greutate se va considera egal cu 1
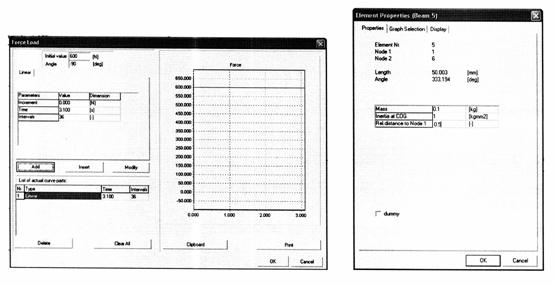
Figura 8.3.9 Figura 8.3.10
Schema de incarcare a mecanismului de pozitionare al scaunului in pozitia de minim, obtinuta cu cele precizate mai sus este prezentata in figura 8.3.11.
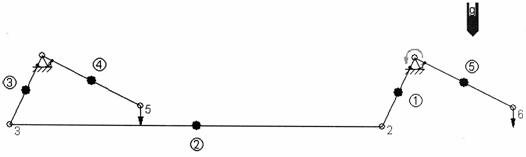
Figura 8.3.11. Schema de incarcare a mecanismului
- obtinerea variatiilor sub forma grafica, a reactiunilor din cuplele cinematice pe ciclul cinematic corespunzator ridicarii mecanismului din pozitia de minim in cea de maxim (3,1 sec).
Valorile maxime ale reactiunilor in cuple:
Reactiunea in cupla 1 (Ao): Rao = 1058,338 N (figura 8.3.12) Reactiunea in cupla 2 (A): RA = 1962 N (figura 8.3.13) Reactiunea in cupla 3 (B); RB = 1962 N (figura 8.3.14) Reactiunea in cupla 4 (Bo): RBo = 1057,773 N (figura 8.3.15) Reactiunea in cupla 5 (D):
RD = 600,763 N (figura 8.3.16) Reactiunea in cupla 6 (E): RE = 601,226 N (figura 8.3.17)
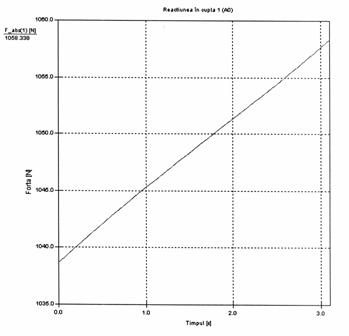
Figura 8.3.12
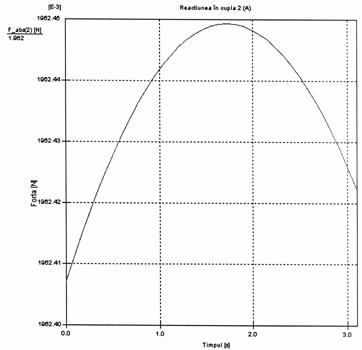
Figura 8.3.13
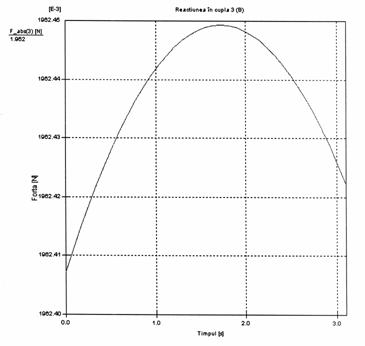
Figura 8.3.14
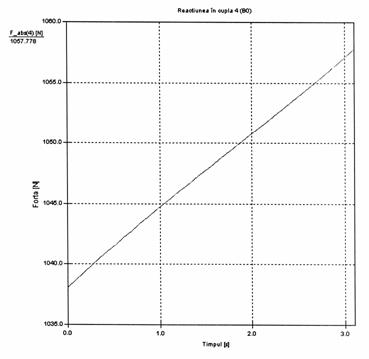
Figura 8.3.15
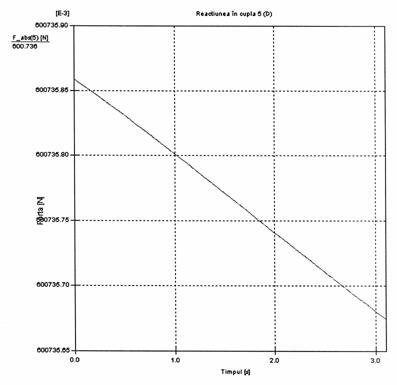
Figura 8.3.16
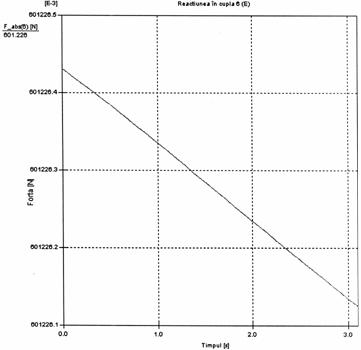
Figura 8.3.17
Cu valorile maxime ale reactiuniior s-a efectuat calculul de dimensionare al bolturilor care materializeaza cuplele cinematice. Schema de solicitare a boltului este prezentata in figura 8.3.18, solicitarea de baza fiind cea de forfecare in suprafata de contact dintre cele doua eiemente cinematice care formeaza cupla respectiva,
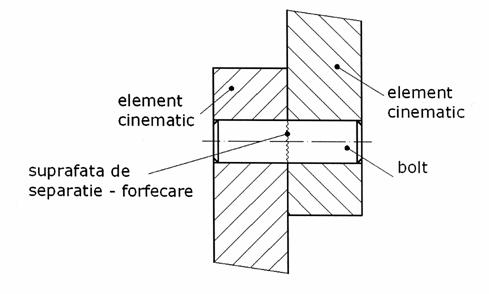
Figura 8.3.18.
Diametrul necesar al, boltului rezulta din conditia de rezistenta la forfecare.

Unde: R - valoarea maxima a reactiunii din cupla cinematica
![]() af - tensiunea admisibila la forfecare pentru materialul boltului
af - tensiunea admisibila la forfecare pentru materialul boltului
Materialul hoiturilor; OL50, ![]() af
=112 MPA (N/mm2)
af
=112 MPA (N/mm2)
cupla 1 (Ao):
Se adopta: d1 = 10 mm
cupla 2 (A):
Se adopta: d2 = 8 mm
cupla 3 (B):
Se adopta: d3 = 8 mm
cupla 4 (Bo):

Se adopta: d4 = 10 mm
cupla 5 (D):
Se adopta: d5 = 8 mm
cupla 6 (E):
Se adopta: d6 = 8 mm
Motoreductorui de antrenare a! mecanismului de pozitionare pe verticala a scaunului soferului este compus dintr-o treapta melc - roata melcata si doua trepte cilindrice. Schema cinematica a mecanismului de antrenare este prezentata in figura 8.4.1.
Figura 8.4.1.
Date initiale
Puterea transmisa: P = 55 W
Turatia de intrare: nm = 3000 rot/msn
Raportul de transmitere: im = 80
Distanta dintre axe impusa: am =30 mm
Tipul melcului: ZE (ewoSwenlic)
Calculul angrenajului melcat consta in calculul de rezistenta al acestuia (distanta dintre axe), respectiv stabilirea dimensiunilor geometrice ale melcului si a rotii melcate. Principalele dimensiuni geometrice ale angrenajului melcat sunt evidentiate in figura 8.4.2.
Determinarea distantei dintre axe ale angrenajului melcat se face printr-un calcul de rezistenta, de dimensionare, in acest sens trebuie cunoscute cauzele care duc la iesirea din uz al acestor angrenaje.
Figura 8.4.2. Dimensiunile geometrice ale angrenajului melcat
Cauzele care determina iesirea din uz a angrenajelor melcate sunt cele aratate la rotile dintate cu dinti drepti, respectiv ruperea dintilor prin oboseala ca urmare solicitarii variabile de incovoiere si distrugerea flancurilor datorita oboselii superficiale, Ia care se mai adauga griparea cauzata de alunecarea dintre dintii melcului si ale rotii melcate. Pentru asigurarea rezistentei la gripare, rezistentele admisibile la rupere prin oboseala si Ia solicitarea de contact se limiteaza in functie de natura materialelor cuplei melc-roata melcata si in functie de viteza de alunecare dintre acestea.
Avand in vedere cele prezentate distanta dintre axe se va calcula in doua situatii:
La ruperea dintilor prin oboseala
La oboseala superficiala a dintilor
Pentru efectuarea calculului de rezistenta al angrenajului melcat se face in prealabil un calcul cinematic
|
|
Numar de dinti |
Turatie n [rot/min] |
Moment de rasucire Mr[Nmm] |
|
Melc |
zi = 1 |
ni = 3000 |
Mri = 175 |
|
Roata melcata |
z2 =81 |
n2 = 37,5 |
Hr2 = 14006 |
Unde :
numarul de inceputuri ale melcului; zi = 1
numarul
de dinti al rotii melcate:
z2 = ![]()
conform [10]: se alege: z2 = 81
n1 = nm = 3000 rot/min (tema de proiectare)
n2 = ![]() =
=![]() = 37,5
rot/min (i = 80 - raportul de
transmitere)
= 37,5
rot/min (i = 80 - raportul de
transmitere)
M![]() =
9550000
=
9550000![]() = 9550000
= 9550000 ![]() = 175 N
= 175 N
M![]() =
9550000
=
9550000![]() =
9550000
=
9550000 ![]() = 175 N
= 175 N![]()
- Calculul de rupere a dintilor prin oboseala
Calculul se efectueaza pentru dintele rotii melcate, deoarece pe de o parte materialul rotii melcate este din fonta, sau aliaje neferoase, avand rezistenta mai mica decat cea a melcului care este din otel, iar pe de alta parte lungimea spirei melcului este mai mare.
In conformitate cu [8] distanta dintre axe ai angrenajului melcat din conditia de rezistenta la ruperea dintilor se determina cu urmatoarea relatie:
a![]() =
10(1+
=
10(1+![]() )
) 
Unde:
z2 = 81 - numarul de dinti al rotii melcate
q - coeficient diametral al melcului, se adopta q = 10 [10]
k = 1,1 - coeficient dinamic
Pc = 55 W = 55![]()
![]() kW - puterea transmisa
kW - puterea transmisa
K este o constanta de transformare de unitati de masura. Daca puterea
se exprima in [kw], turatia in [rot/min], dimensiunile in [cm], iar efortul
unitar ![]() in
in ![]() ,
atunci constanta K=79.6
,
atunci constanta K=79.6
σai = 375 ![]() ,
sau σai =3750
,
sau σai =3750![]() pentru materialul rotii melcate
- fontacu grafit nodular in
aceste conditii distanta dintre axe devine:
pentru materialul rotii melcate
- fontacu grafit nodular in
aceste conditii distanta dintre axe devine:

![]()
Distanta dintre axe necesara obtinuta din conditia de rezistenta la ruperea dintilor prin oboseala este mai mica decat distanta dintre axe impusa, rezistata din conditiile de gabarit si montaj (am =30 mm).
- Calculul la oboseala superficiala a dintilor
Solicitarea de contact σk rezulta ca si in cazul angrenajelor cilindrice din relatia lui Hertz pentru suprafete cilindrice:
σk = 0.418
Dupa inlocuiri in relatia de mai sus, distanta dintre axe se determina cu urmatoarea relatie:
a2 = 
Unde:
z2 = 81 - numarul de dinti al rotii melcate
q - coeficient diametral al melcului, se adopta q = 10 [10]
k = 1,1 - coeficient dinamic
Pc = 55 W = 55-IO -3 kW - puterea transmisa
σak = 625 ![]() σak = 6250
σak = 6250 ![]() sau pentru materialul rotii
sau pentru materialul rotii
melcate - fonta cu grafit nodular
β - unghiul de panta al elicei melcului, se adopta β = 5,5, urmand sa fie
determinat exact la calculul dimensiunilor geometrice
E = 2,1x105![]() , sau E = 2,1x10 6
, sau E = 2,1x10 6![]()
modulul de elasticitate longitudinal, in aceste conditii distanta dintre axe devine:
a2nec =  = 1,6cm = 16mm
= 1,6cm = 16mm
Distanta dintre axe necesara obtinuta din conditia de rezistenta la oboseala superficiala a dintilor este mal mica decat distanta dintre axe impusa, rezultata din conditiile de gabarit si montaj (am =30 mm).
in final distanta dintre axe (standardizata): am =30 mm
Dimensiunile geometrice ale angrenajului rnelcat se calculeaza cu ajutorul melcului de referinta:
elementele melcului de referinta, conform SR 915 -l [10]:
unghiul profilului: αn0 = 20 grade
coeficientul inaltimii capului spirei melcului: ha* = 1
coeficientul jocului radiat: c* = 0,2
coeficientul inaltimii spirei: h0*=
coeficientul grosimii de
calcul a spirei: s0* = 0,5 ![]() =
1,57
=
1,57
Dimensiunile geometrice ale melcului si rotii melcate sunt prezentate in figura 8.4.3.
Figura 8.4.3 Dimensiunile geometrice ale angrenajului melcate
conform [10]: se alege: z2 = 81
coeficientul diametral al melcului [ 10]: q = 10
sensul elicei melcului: dreapta
modulul axial, m
a = ![]()
Dupa standardizare, m = 0,7 mm, conform STAS 822 - 82 deplasarea specifica la roata melcata:
x = ![]()
diametrele de divizare:
dOm =mq = 0,7x10 = 7 mm
d0rm =mz2 = 0.7 x 81 = 56,7 mm
pasul elicei melcului: conform figurii 8.4.4.
pe = p = z1pa = z1![]() m
= 1 x
m
= 1 x![]() 0,7
= 2,2 mm
0,7
= 2,2 mm
unghiul de panta al elicei melcului (conform figurii8. 4.4):
β0 = arctg ![]() grade
grade
inaltimea capului spirei melcului:
ha = m x ha* = 0,7 x 1 = 0,7mm
inaltimea spirei melcului:
h0 = m x h0* = 0,7 x 2,2 = 1,54 mm
Figura 8.4.4. Elementele elicei melcului
diametrul exterior ai melcului:
dem=dOm+2ha =7 + 2-0,7 = 8,4 mm
diametrul interior al melcului:
dim = m (q - 2,5) = 0,7(10 - 2,5) = 5,25 mm
diametrul exterior al rotii melcate:
derm = dOrm + 2(h*a + x)m = 56,7 + + 2,64) . 0,7 = 61,8 mm
diametrul maxim al rotii melcate:
derm(max) = d0rm +![]() mm
mm
raza de rotunjire a suprafetei exterioare a rotii melcate:
R = 0,5 . dOm - ha = 0,5 . 7 - 0,7 = 2,8 mm
lungimea melcului (zona danturata):
L = (11 + 0,06 z2)m = (11 + 0,06 x 81) x 0,7 = 12 mm
latimea coroanei dintate a rotii melcate:
b2 = 0,75 . dem = 0,75 . 8,4 = 6,3 mm
Fortele din angrenajele melcate
Se considera doi dinti aflati in angrenare, unul apartinand melcului si altul rotii melcate asa cum se arata in figura 8.4.5. in punctul de contact al flancurilor dintilor conjugati se exercita forta normala Fn dupa directia liniei de angrenare, respectiv Fnm pentru rnelc si Fnrm pentru roata melcata, egale ca marime si de sensuri contrare, care se descompun dupa trei directii perpendiculare, rezultand componentele tangentiale, Ftm si Ftrm, radiaie, Frm si Frrm respectiv axiale, Fam si Farm .
Figura 4.5. Fortele in angrenajul melc-roata melcata
Aceste forte se calculeaza dupa cum urmeaza:
- fortele tangentiale:
pentru melc:
Ftm = ![]() N
N
pentru roata melcata:
Ftm = ![]() N
N
- forte radiale:
pentru melc si roata melcata:
Frm = Frrm ![]() Ftrm
Ftrm
![]() N
N
unde:
tgφ = μ = 0,15
![]() fiind coeficientul de
frecare.
fiind coeficientul de
frecare.
fortele axiale:
pentru melc:
Fam = Ftrm = 494 N
pentru roata melcata:
Farm=Ftm=50N
forta normala Fn;
Fn
=![]() N
N
Date initiale
Puterea transmisa: Pn = 55 W
Turatia de intrare: n1 = 37,5 rot/min
Raportul de transmitere: i1 = 3,15
Distanta dintre axe impusa: a1 = 32 mm
Unghiul de inclinare al danturii: β= 0 grade
Proiectarea angrenajelor are Ia baza calculul de rezistenta al acestora, care se efectueaza cu scopul determinarii dimensiunilor rotilor dintate, sau a verificarii celor existente, in concordanta cu solicitarile la care ele sunt supuse in diferite regimuri de functionare si cu caracteristicile de rezistenta ale materialelor din care acestea se executa.
In acest sens este foarte important sa se cunoasca cauzele iesirii din uz a angrenajelor, respectiv a solicitarilor acestora.
Cauzele iesirii din uz a angrenajelor se pot grupa in doua categorii de baza si anume:
ruperea dintilor;
distrugerea flancurilor.
Ruperea dintilor este un mod periculos de deteriorare a rotilor dintate si a angrenajelor in ansamblu, uneori chiar a altor organe de masini conexe, ea fiind cauzata de in principal de:
suprasarcini cu actiune statica sau prin soc;
oboseala materialului dintilor.
Ruperea dintilor prin suprasarcini se datoreaza unor supraincarcari, de regula prin soc, suprafata de rupere fiind zgrunturoasa. Ruperea dintilor se poate datora si unor tratamente de calire-revenire incorecte, cand se rup portiuni din varfurile acestora.
Ruperea dintilor prin oboseala este cauzata de solicitarea la incovoiere dupa un ciclu pulsator atunci cand angreneaza o pereche de roti dintate sau alternant simetric atunci cand roata dintata este intermediara, angrenand in acelasi timp cu doua roti dintate, incovoierea pulsatorie sau alternanta a dintelui poate conduce dupa un numar relativ mare de cicluri la formarea unor fisuri de oboseala in zona de racordare a dintelui la corpul rotii (figura 8.4.6), unde are loc si o concentrare puternica de eforturi cauzata de variatia de sectiune. Aceste fisuri se dezvolta in timp, pana la producerea ruperii. Suprafata de rupere este caracteristica ruperii prin oboseala, avand o portiune neteda cauzata de oboseala si una zgrunturoasa cauzata de ruperea in stadiul final. Ca masuri de prevenire sau de limitare a acestor cauze se amintesc: deplasari pozitive de profil, racordarea dintelui la corpul rotii cu raza mare, adoptarea unor module mari, utilizarea unor materiale cu rezistenta ridicata si a unor tratamente termice care conduc la marirea rezistentei la oboseala.
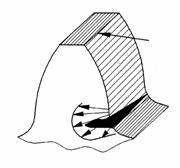
Figura 8.4.6. Ruperea dintilor prin oboseala
Distrugerea flancurilor dintilor este cauzata de urmatorii factori:
oboseala superficiala a suprafetei active de contact dintre dinti;
griparea;
uzarea abraziva;
deformatia plastica a flancurilor;
Oboseala superficiala reprezinta principala cauza de distrugere a flancurilor dintilor, ce consta in desprinderi locale de material de pe flancuri si formarea concomitenta a unor adancituri denumite si ciupituri. Cauza formarii adanciturilor este oboseala materialului rotii in stratul superficial al flancurilor dintilor, determinata de marimea solicitarii de contact si de numarul de cicluri de solicitare. Prin solicitarea de contact dintre dintii conjugati, in timpul functionarii intre flancuri iau nastere forte de frecare de alunecare, ale caror marime creste in conditiile unor ungeri defectuoase. Aceste forte de frecare determina deformatii ale stratului superficial in sensul lor de actiune, care prin repetarea lor ciclica provoaca aparitia unor fisuri, care cresc in timp si ca urmare a presiunii hidrostatice a lubrifiantuiui presat in ele. Dupa unirea mai multor fisuri intre ele se produc desprinderi de material (ciupituri). Zona in care apar cele mai muite fisuri este in vecinatatea cercului de rostogolire, deoarece in aceasta zona forta de frecare este maxima. Marirea rezistentei flancurilor Ia oboseala superficiala se poate obtine prin: deplasari de profil, durificarea flancurilor prin calire superficiala, prin cementare sau nitrurare, respectiv utilizand lubrifianti de calitate superioara cu viscozitate ridicata.
Griparea este deteriorare a flancuriior dintilor, ce consta in formarea unor adancituri spre varful acestora, din cauza unor suduri locale intre flancuri, produse de solicitarile de contact si de cele termice ridicate din lipsa, sau insuficienta lubrifiantului, in special la viteze mari.
Uzarea abraziva apare in angrenajele deschise, care lucreaza in medii impure, prin patrunderea unor particule abrazive intre dinti.
Deformatia plastica a dintilor se produce in cazul unor solicitari mari si a unor duritati reduse (fara tratament termic sau termochimic de durificare) ale flancurilor.
In final calculul de rezistenta a! angrenajelor consta in determinarea marimii acestora (distanta dintre axe, sau modulul) din conditia de rezistenta Ia ruperea dintilor prin oboseala, respectiv din conditia de rezistenta la solicitarea de contact a flancurilor.
Alegerea materialelor si a tratamentelor termice
Materialele pentru rotile dintate sunt recomandate in conformitate cu standardele in vigoare conform (STAS 12268-84). Materialele pentru pinion si roata condusa se aleg in functie de conditiile de solicitare si functionare.
Pentru conditii medii de solicitare, viteze periferice mici si mijlocii, respectiv conditii de functionare cu soc se recomanda alegerea otelurilor de imbunatatire.
Astfel pentru pinion si roata condusa se alege materialul: 18MnCr10 (otel aliat de cementare) cu urmatoarele caracteristici:
Tensiunea limita de baza Ia solicitarea de contact: al unei
epruvete din
acelasi material si supus acelorasi tratamente termice ca si roata
dintata:
σH limb = 1667,5 [MPa]
Tensiunea limita la oboseala datorata incovoierii la baza
dintelui al
unei epruvete din acelasi
material si supus acelorasi tratamente termice
ca si roata dintata:
σ 0 lim= 1062,5 [MPa]
Duritatea flancurilor 58 - 62HRC.
Calculul distantei dintre axe
Dupa cum s-a specificat mai sus marimea angrenajului se determina tinand seama de cauzele iesirii din uz al acestora, respectiv distrugerea flancurilor si ruperea dintilor in conditii reale de functionare.
. Determinarea puterii de calcul
Puterea de calcul Pc, se obtine din puterea nominala care se inmulteste cu un coeficient k, denumit coeficientul sarcinii de calcul. Rezulta deci:
Pc = kPn
Coeficientul sarcinii de calcul, k se obtine din alti coeficienti ce tin seama de conditiile reale de incarcare si functionare, astfel [10]:
K = ![]()
unde: - ks- este un coeficient de suprasarcina, ks se,alege ks = 1,1 [10], se alege
kb- coeficientul de neuniformitate a repartizarii sarcinii pe
latimea dintelui, care tine seama de abaterea de Ia paralelismul arborilor, a deformatiilor, etc, kb = 11,45 se alege kb = 1,1 .
kd- coeficientul dinamic al angrenarii, ce tine seama de
solicitarea dinamica a dintilor din cauza jocurilor dintre flancurile rotilor conducatoare si conduse, kd = 11,6 [10], in functie de clasa de precizie si de viteza; se alege kd = 1,1
k![]() -coeficientul gradului de acoperire, kP = (0,750,85)
-coeficientul gradului de acoperire, kP = (0,750,85)![]() [10].
[10].
la precizii ridicate (clasele 6,7),
se alege k![]() = 0,95,
= 0,95,
Rezulta:
K = ![]() =
= ![]()
Pc =kPn =l,4-55 = 77[w]=77 x 10-3[kW]
Calcuiul distantei dintre axe din conditia de rezistenta la oboseala datorata solicitarii de contact a flancurilor dintilor
Distanta dintre axe se determina pornind de la relatia lui Hertz pentru solicitarea de contact intre doua suprafete cilindrice [10]:
a1 = (1,21,3)(i+1)
Unde:
i - raportul de transmitere: i = 3,15
β- unghiul de inclinare al danturii: β =0 grade
![]() a - coeficientul de
latime ai danturii:
a - coeficientul de
latime ai danturii: ![]() a = 0,3
a = 0,3
KA - factor de utilizare: KA = 1,1 [10]
ZE - factor de material: ZE = 189,8 [MPa] [10]
Mr - momentul de rasucire la pinion (arbore de intrare)
Mr = 9550000 ![]() [Nmm]
[Nmm]
σHp - tensiunea de contact admisa la proiectare:
σHp = ![]()
SHp - coeficient de siguranta admis la proiectare: Shp = 1,15 [10]
ΣHlim- limita de rezistenta Ia solicitarea de contact hertzian:
σHlim = σHlimb ZN . ZL . Zv . ZR . Zw . Zx
Unde:
aHlimb = 1667,5[MPa] (pentru 18MnCr10) [10]
ZN - factor de durabilitate: ZN = 1,15 [10]
ZL - factor de ungere: ZL = 0,98 [10]
Zv - factor de viteza: Zv = 1,02 [10]
ZR - factor de rugozitate (pe flancul dintelui): ZR = 1,07 [10]
Zw - factor al raportului duritatii flancurilor: Zw = 1 [10]
Zx - factor de scara: Zx = 1 [10]
Facand inlocuirile rezulta:
σHlim = 1667,5 . 1,15 . 0,98 .1,02 .1,07 . 1. 1 = 2051 [MPa] Respectiv:
σHp
= ![]() =1783
[MPa]
=1783
[MPa]
In final distanta dintre axe necesara va avea valoarea:
a1nec = 1,2(3,15+1) =
31,72 [mm]
=
31,72 [mm]
. Calculul distantei dintre axe din conditia de rezistenta la oboseala datorata incovoierii la baza dintelui
Distanta dintre axe se determina pornind de la relatia de calcul a tensiunii de incovoiere [10]:
a2=(1.21.35)
Unde:
i - raportul de transmitere: i = 3,15
β - unghiul de inclinare al danturii: β=0 grade
![]() - coeficientul de latime
al danturii:
- coeficientul de latime
al danturii: ![]() =
0,3
=
0,3
KA - factor de utilizare: KA = 1,1 [10]
z1 - numarul de dinti al pinionului: z1 = 17
Mr - momentul de rasucire la pinion (arbore de intrare)
Mr
= 9550000![]() = 9550000
= 9550000 ![]() [Nmm]
[Nmm]
σFp - tensiunea admisa la proiectare la incovoiere:
![]() Fp
=
Fp
=
![]()
SFp - coeficient de siguranta admis la proiectare: SHp = 1,25 [10]
σFIim - limita de rezistenta Ia oboseala de incovoiere la baza dintelui:
![]() [MPa]
[MPa]
Unde:
σFlim = 1062,5 [MPa] (pentru 18MnCr10) [10]
YN - factor de durabilitate: ZN = 1,15 [10]
Y![]() - factor de sensibilitate: Y
- factor de sensibilitate: Y![]() = 1 [10]
= 1 [10]
YR - factor de rugozitate (la baza dintelui): YR = 0,96[10]
Yx - factor de scara: Yx = 1 [10]
Facand inlocuirile rezulta:
σFlim = 1062,5 .1,15 . 1 . 0,96 . 1 = 1173 [MPa] Respectiv:
σFp = ![]() [MPa]
[MPa]
In final distanta dintre axe necesara va avea valoarea:
a2 =1,2![]() [mm]
[mm]
Distanta dintre axe necesara se va alege in asa fel incat sa fie acoperitoare pentru ambele cazuri de solicitare, respectiv: oricum ambele valori rezultate sunt mai mici decat valoarea impusa (32 mm), obtinuta din conditiile de gabarit si montaj, in urma sintezei mecanismului.
anec = max(a1, a2) = max(31,72;30,8) = 31,72 [mm]
a = 32 [mm]
Calculul geometric al angrenajului cilindric
numarul de dinti
Din conditia evitarii fenomenului de subtaiere al dintilor se recomanda
z1 = min(17). Se alege z1 = 17.
z2 = z1-i = 17-3,15 = 54
modulul rotilor dintate
Modulul reprezinta lungimea masurata pe diametrul de divizare ce corespunde unui dinte si se determina dupa cum urmeaza:
a = ![]() [mm]
[mm]
Valoarea obtinuta se standardizeaza (STAS 822-82) ![]() m
= 0,9 [mm]
m
= 0,9 [mm]
Datorita standardizarii modulului marimea distantei dintre axe se modifica. Valoarea reala se obtine cu relatia:
ar
=  [0]
[0]
Deoarece conform proiectului se impune distanta dintre axe standardizata obtinuta dupa calculele de rezistenta, diferenta dintre valoarea impusa si cea reala se va regla prin deplasarile de profil,
Unghiul de angrenare
Se masoara pe cercurile de rostogolire si se calculeaza cu relatia:
ar = a  [0]
[0]
Coeficientii de deplasare a danturi/or
in prima faza se calculeaza suma coeficientilor de deplasare:
x1+x2 = ![]()
Unde: inv (19,75) = tg(19,75)
-19,75![]() =
0,014
=
0,014
inv (20) = tg(20) - 20 ![]() = 0,015
= 0,015
Coeficientii de deplasare x1 si x2 se repartizeaza pe cele doua roti dintate, in functie de suma lor si de conditiile de functionare al angrenajului, conform recomandarilor din tabelul 4.1 [10],
Tabelul 8.4.1.
|
Distanta dintre axe |
Deplasari de profil |
Domenii de aplicare |
|||||
|
X1+X2 |
X1 |
X2 |
Tipul transmisiei |
Z1 |
Z2 |
ir |
|
|
Aw = A |
|
|
|
Cinematica |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
De putere |
|
|
|
|
|
|
|
|
|
|
|
||
|
Aw > A |
|
x1 + x2 |
|
Cinematica |
|
|
|
|
De putere |
|
|
|
||||
|
|
|
x1+x2-0,5 |
Cinematica |
|
|
|
|
|
De putere |
|
|
|
||||
|
Aw < A |
|
|
x1+x2 |
Cinematica |
|
|
|
|
|
|
|
x1+x2-0,5 |
De putere |
|
|
|
Conform recomandarilor din tabelul 8.4.1 pentru:
x1+x2
= -0,09 (![]() (-0,5.0))
(-0,5.0))
![]() x1 = 0; x2 = x1+x2 =
-0,09
x1 = 0; x2 = x1+x2 =
-0,09
Calculul geometric al angrenajului cilindric presupune determinarea dimensiunilor geometrice ale acestuia. Una din conditiile necesare ca doua roti dintate sa angreneze, este ca dimensiunile geometrice ale dintilor celor doua roti sa fie egale. Astfel la proiectarea rotilor dintate, dar si a sculelor aschietoare cu care acestea se prelucreaza, forma si profilul dintilor se defineste cu ajutorul cremalierei de referinta (figura 8.4.7). Elementele definitorii ale cremalierei de referinta sunt adimensionale, marimile dintilor rezultand din inmultirea acestora cu modulul m.
|
Figura 8.4.7. Cremaliera de referinta |
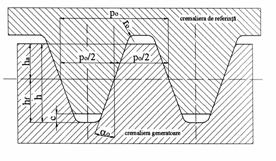
Elementele care definesc cremaliera de referinta sunt enumerate dupa cum urmeaza (SR 915 - 1):
-![]() 0
=20°- unghiui profilului de referinta;
0
=20°- unghiui profilului de referinta;
- p0 = ![]() m
- pasul de referinta;
m
- pasul de referinta;
-ha = h*am - inaltimea capului de referinta;
-h*a = 1 - coeficientul capului de referinta;
c = c*m = 0,25m - jocu! de referinta la fund;
c* = 0,25 - coeficientul specific de la fundul dintelui;
hf = ha
+ c = 1,25 m - inaltimea
piciorului dintelui
h = ha +hf = 2,25 m -
inaltimea dintelui.
Principalele dimensiuni geometrice ale unui angrenaj cilindric, respectiv ale danturii rotilor dintate sunt prezentate in figura 8.4.8.
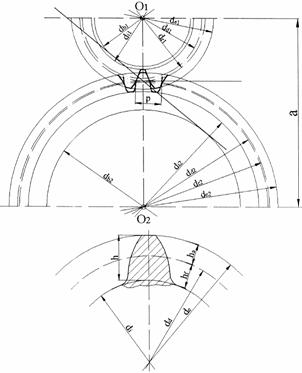
Figura 8.4.8. Dimensiunile geometrice ale rotilor dintate
Diametrul de divizare: dd
dd 1 = mz1 = 0,9 x17 = 15,3mm
dd 2 = m z2 = 0,9 x 54 = 48,6 mm
Diametrele de rostogolire, dr :
dr
1 = mz1 ![]() mm
mm
dr
2 = mz2 ![]() mm
mm
Diametrele de varf, de :
del =ddl+2rn(ha*+x1)= 15,3+ 2 . 0,9(l + 0)= 17,1 mm
de 2 = dd 2 + 2 m(ha* + x2) = 48,6 + 2 . 0,9(l - 0,09) = 50,23 mm
Diametrele interioare, di :
di 1 = dd 1 - 2m(ha* + c* - x1) = 15,3 - 2 . 0,9(1 + 0,25 - 0) = 13,05 mm
di 2 = dd 2 - 2m(ha* + c* - x2) = 48,6 - 2 . 0,9(1+ 0,25 + 0,09) = 46,18 mm
Diametrele cercului de baza, db :
dbl = ddlcos![]() 0
= 15,3 cos20 = 14,37 mm
0
= 15,3 cos20 = 14,37 mm
db 2 = dd 2 cos![]() 0
= 48,6 cos20 = 45,66 mm
0
= 48,6 cos20 = 45,66 mm
Latimea rotii conduse; b2 = ![]() A
. a = 0,3 . 32 = 10 mm
A
. a = 0,3 . 32 = 10 mm
Latimea pinionului : b2 = b2 + (26)mm = 10 + 2 = 12 mm
Gradul de acoperire
 = 1,61 >1,3
= 1,61 >1,3
Date initiale
Puterea transmisa; P" = 55 W
Turatia de intrare: n2 = 11,9 rot/min
Raportul de transmitere: i1 = 5
Distanta dintre axe impusa: a2 = 70 mm
Unghiul de inclinare al danturii: β = 0 grade
Proiectarea angrenajului cilindric - treapta 2 (calcul de rezistenta si geometric) se face in mod similar cu angrenajul cilindric - treapta 1.
Alegerea materialelor si a tratamentelor termice
Pentru pinion si roata condusa se alege materialul: 18MnCr10 (otel aliat de cementare) cu urmatoarele caracteristici:
Tensiunea limita de baza la solicitarea de contact: al unei
epruvete din
acelasi materia! si supus acelorasi tratamente termice ca si roata
dintata:
σH lim b= 1667,5 [MPa]
Tensiunea limita la oboseala datorata incovoierii la baza
dintelui al
unei epruvete din acelasi
material si supus acelorasi tratamente termice
ca si roata dintata:
σ0 lim= 1062,5 [MPa]
Duritatea flancurilor 58 - 62HRC.
Calculul distantei dintre axe
Dupa cum s-a specificat marimea angrenajului se determina tinand seama de cauzele iesirii din uz al acestora, respectiv distrugerea flancurilor si ruperea dintilor in conditii reale de functionare.
. Determinarea puterii de calcul
Puterea de calcul Pc, se obtine din puterea nominala care se inmulteste cu un coeficient k, denumit coeficientul sarcinii de calcul. Rezulta deci:
Pc =kPn
Coeficientul sarcinii de calcul, k se obtine din alti coeficienti ce tin seama de conditiile reale de incarcare si functionare, astfel [10]:
K = ![]()
unde: - ks- este un coeficient de suprasarcina, ks = 12,25[10], se alege ks = 1,1 [10], se alege
kb- coeficientul de neuniformitate a repartizarii sarcinii pe
latimea dintelui, care tine seama de abaterea de la paralelismul arborilor, a deformatiilor, etc, kb = 11,45 [10], se a!ege kb = 1,1 .
kd- coeficientul dinamic al angrenarii, ce tine seama de
solicitarea dinamica a dintilor din cauza jocurilor dintre flancurile rotilor conducatoare si conduse, kd = 11,6 [10], in functie de clasa de precizie si de viteza; se alege kd = 1,1
k![]() -
coeficientul gradului de acoperire, k
-
coeficientul gradului de acoperire, k![]() = (0,750,85)
= (0,750,85)![]() ,
,
Ia precizii ridicate (clasele 6,7), se alege k![]() = 0,95.
= 0,95.
Rezulta:
K
= ![]() =
= ![]() = 1,4
= 1,4
Pc =kPn =(1,4)(55) = 77[w]=77 x 10-3[kW]
< Calculul distantei dintre axe din conditia de rezistenta la oboseala datorata solicitarii de contact a flancurilor dintilor >
Distanta dintre axe se determina pornind de la relatia lui Hertz pentru solicitarea de contact intre doua suprafete cilindrice [10]:
a1 = (1,21,3)(i+1)
Unde:
i - raportul de transmitere: i = 5
β- unghiul de inclinare al danturii: (3=0 grade
Ψa - coeficientul de latime al danturii: i|/a = 0,3
KA ~ factor de utilizare: KA = 1,1 [10]
ZE - factor de material: ZE = 189,8 [MPa] [10]
Mr - momentul de rasucire la pinion (arbore de intrare)
Mr = 9550000 ![]() =
9550000
=
9550000 ![]() = 61794[Nmm]
= 61794[Nmm]
σHp - tensiunea de contact admisa la proiectare:
σHp = ![]()
SHp - coeficient de siguranta admis la proiectare: SHp = 1,15 [10]
σH lim - limita de rezistenta la solicitarea de contact hertzian:
σH lim = σH lim b ZN ZL Zv ZR ZW Zx
Unde:
aHlimb = 1667,5[MPa] (pentru 18MnCr10) [10]
ZN - factor de durabilitate: ZN = 1,15 [10]
ZL - factor de ungere: ZL = 0,98
Zv - factor de viteza: Zv = 1,02 [10]
ZR - factor de rugozitate (pe flancul dintelui): ZR = 1,07 [10]
Zw - factor a! raportului duritatii flancurilor: Zw = 1 [10]
Zx - factor de scara: Zx = 1 [10]
Facand inlocuirile rezulta:
σHlim = 1667,5 . 1,15 . 0,98 . 1,02 . 1,07 . 1 . 1 = 2051 [MPa]
Respectiv:
σHp= ![]() = 1783 [MPa]
= 1783 [MPa]
in final distanta dintre axe necesara va avea valoarea:
a1nec = 1,2.(5+1) mm
mm
. Calculul distantei dintre axe din conditia de rezistenta la oboseala datorata incovoierii la baza dintelui
Distanta dintre axe se determina pornind de la relatia de calcul a tensiunii de incovoiere [10]:
a2 = (1,21,35)
Unde:
i - raportul de transmitere: i = 5
β - unghiul de inclinare al danturii: β=0 grade
Ψa coeficientul de latime al danturii: Ψa = 0,3
KA - factor de utilizare: KA = 1,1
Z1- numarul de dinti al pinionului: Z1= 17
Mr - momentul de rasucire la pinion (arbore de intrare)
Mr
= 9550000 ![]() =
61794 [Nmm]
=
61794 [Nmm]
σFp - tensiunea admisa Ia proiectare la incovoiere:
σFp = ![]()
SFp - coeficient de siguranta admis la proiectare: SHp = 1,25 [10]
σFlim - limita de rezistenta la oboseala de incovoiere la baza dintelui:
σFlim = σ0lim![]()
Unde:
σFlim = 1062,5 [MPa] (pentru 18MnCr10) [10]
YN - factor de durabilitate: ZN = 1,15 [10]
Yδ - factor de sensibilitate: Yδ = 1 [10]
YR - factor de rugozitate (la baza dintelui): YR = 0,96[10]
Yx - factor de scara: Yx = 1 [10]
Facand inlocuirile rezulta:
σF lim = 1062,5 . 1,15 . 1 . 0,96 . 1 = 1173 [MPa] Respectiv:
σFp = ![]() [MPa]
[MPa]
in final distanta dintre axe necesara va avea valoarea:
a2 = 1,2![]() [mm]
[mm]
Distanta dintre axe necesara se va alege in asa fel incat sa fie acoperitoare pentru ambele cazuri de solicitare, respectiv: Oricum ambele valori rezultate sunt mai mici decat valoarea impusa (70 mm), obtinuta din conditiile de gabarit si montaj, in urma sintezei mecanismului
anec = max(a1,a2)= max(57,65;62,69) = 62,69 [mm]
a = 70 [mm]
Calculul geometric al angrenajului cilindric
numarul de dinti
Din conditia evitarii fenomenului de subtaiere al dintilor se recomanda
z1 = min(17). Se alege z1 = 17.
z2 =z1. i2
modului rotilor dintate
a = ![]() [mm]
[mm]
Valoarea obtinuta se standardizeaza (STAS 822-82) → m= 1,375 [mm]
distanta dintre axe recalculata;
ar = ![]() [mm]
[mm]
Unghiul de angrenare
a = a [0]
[0]
. Coeficientii de deplasare a danturilor
x1 + x2 = ![]()
unde: inv (20,27) = tg(20,27)-
20,27![]() = 0,0157
= 0,0157
inv (20) = tg(20)- 20 ![]() = 0,015
= 0,015
Conform recomandarilor din tabelul 8.4.1:
x1 + x2 = 0,098 ( ![]() (0 0,5))
(0 0,5)) ![]() x1 = x1 + x2 =
0,098; x2 = 0
x1 = x1 + x2 =
0,098; x2 = 0
Dimensiunile geometrice
Calculul geometric al angrenajului cilindric - treapta 2 se face pe baza elementelor cremalierei de referinta (SR 915 -1,figura 8.4.7).
Diametrul de divizare: dd
dd1=mz1=1,375 .17 = 23,375 mm
dd 2 = mz2 = 1,375 85 = 116,875 mm
Diametrele de rostogolire, dr
dr1 = mz1 ![]() mm
mm
dr2 = mz2 ![]() mm
mm
Diametrele de varf, de
de1 = dd1+2m(h*a + x1) = 23,375 + 2 . 1,375(1 + 0,098) = 26,39 mm
de2=dd2 +2m(h*a+x2) = 116,875 + 2 1,375(1-0) = 119,62 mm
Diametrele interioare, di
di1 = dd1 -2m(h*a + c* - x1) = 23,375 - 2 1,375(1 + 0,25 - 0,098) = 20,2 mm
di2 = dd2 - 2m(h* + c* - x2)= 116,875 - 2 . 1,375(1 + 0,25 - 0) = 112,93 mm
Diametrele cercului de baza, db
db1 =dd1cosα0 =23,375 cos20 = 21,96 mm
db2 = dd2cosα0 = 116,875 cos20 = 109,35 mm
Latimea rotii conduse; b2 = ΨA . a = 0,3 . 70 = 21 mm
Latimea pinionului : b2 = b2 + (26)mm = 21 + 4 = 25 mm
Gradul de acoperire
 =
=
=  >1,3
>1,3
In vederea lansarii pe piata a unui produs, este necesara testarea acestuia prin realizarea unor prototipuri. Se stie ca realizarea prototipului real este costisitoare si consumatoare de timp. Prin realizarea modelului 3D a produsului in Autodesk Inventor Professional (sau Solid Edge,SolidWorks) se poate crea si testa un prototip complet virtual in conditii reale de exploatare. in acest sens se poate verifica potrivirea pieselor in ansamblu, respectiv detecta interferentele si alte erori ale modelului. Prin simularea dinamica a produsului se poate verifica cinematica ansamblului in conditii reale de functionare si incarcare. Prin simularea functionarii mecanismelor si ansamblurilor asigura validarea proiectarii si evita necesitatea realizarii de prototipuri.
Elementele cinematice (bare articulate, angrenaje) componente ale mecanismului de pozitionare al scaunului au fost modelate parametrizat in SolidEdge. Modelarea parametrizata are avantajul ca in orice moment al proiectarii se pot aduce modificari (dimensionale sau geometrice) pieselor si ansamblurilor, modificari care se adapteaza automat in toate subansamblurile sau desenele de executie asociate, reducandu-se considerabil timpii de proiectare in cazul unor modificari efectuate din diverse neconcordante sau la cererea clientului.
Piesele componente astfel modelate sunt asamblate prin utilizarea constrangerilor 3D. Alegerea constrangerilor de asamblare este foarte importanta, deoarece in continuare in continuare s-a realizat verificarea cinematicii mecanismului de pozitionare al scaunului soferului, a interferentelor pieselor componente, respectiv se urmareste realizarea prototiparii rapide prin simulare dinamica, S-a optat pentru constrangeri de tip mate, care sa sugereze generarea cuplelor cinematice de rotatie intre elementele cinematice aie mecanismului. Constrangerile dintre rotile dintate ale motoreductorului au fost create automat, prin modelarea angrenajelor melcate si cilindrice. Modelul 3D al mecanismului de pozitionare al scaunului la autovehicule este prezentata in figura 8.5.1.
Figura 8.5.1. Modelul 3D al mecanismului de pozitionare
Pentru realizarea simularii dinamice, respectiv a prototiparii rapide s-a considerat o varianta simplificata a mecanismului de pozitionare, prin eliminarea angrenajului melcat si a! angrenajului cilindric treapta 1, din componenta motoreductorului de antrenare. Modele mecanismului simplificat in cele doua pozitii extreme sunt prezentate in figurile 8.5.2 si 8.
|
Figura 8.5.2. Mecanismul in pozitie inferioara |
|
|
Figura 8.5.3. Mecanismul in pozitie superioara
Simularea dinamica s-a realizat prin parcurgerea urmatoarelor etape:
- Definirea cuplelor cinematice:
Cuplele cinematice ale mecanismului cu cama se pot obtine prin convertirea automata a constrangerilor de asamblare. Acest lucru este riscant pentru ca daca constrangerile de asamblare nu au tinut cont de toate restrictiile cu privire la posibilitatile de miscare ale elementelor, pot rezulta cuple cinematice de clase superioare celor din realitate. in acest sens fiecare cupla cinematica va creata, fie prin convertirea individuala, manuala, a constrangerilor de asamblare aferente, fie ca o noua legatura mobila.
Cupla cinematica Ao - de rotatie (element fix - sector dintat).
|
|
S-a realizat prin convertirea manuala a constrangerilor de asamblare dintre elementul fix si sectorul dintat, conform figurii 8.5.4.
|
|
Figura 8.5.4. Definirea cuplei cinematice Ao
Cupla cinematica A - de rotatie (sector dintat - biela principala).
S-a realizat prin convertirea manuala a constrangerilor de asamblare dintre sectorul dintat si biela principala, conform figurii 8.5.5.

Figura 8.5.5. Definirea cuplei cinematice A
Celelalte cuple cinematice de rotatie s-au definit in mod similar.
Cupla cinematica de angrenare - rotatie + alunecare relativa (pinion sector dintat).
S-a creat ca o cupla cinematica noua, de angrenare, prin definirea tangentei intre cercurile de rostogolire ale pintenului si al sectorului dintat, conform figurii 8.5.6.

Figura 8.5.6. Definirea cuplei cinematice de angrenare
. Definirea miscarii de antrenare a mecanismului - Input motion, S-a definit in cupla de rotatie element fix - pinion o miscare de rotatie, prin unghi de rotatie, viteza de rotatie sl moment de antrenare.
Unghiul de rotatie
Pentru realizarea cursei de ridicare ai scaunului (h = 38 mm) in timpu! t = 3,1 s, conform ternei de proiectare, pinionul efectueaza o miscare de rotatie incompleta in intervalul 0 220,1 grade (figura 8.5.7)
Figura 8.5.7. Pozitiile extreme ale pinionului
Viteza de rotatie
Conform calculelor de proiectare al angrenajelor viteza de rotatie a pinionului este 11,9 rot/min, respectiv 71 grade/sec. Semnul minus indica sensul de rotatie (figura 8.5.8)

Figura 8.5.8. Viteza de rotatie
Momentul de antrenare
Conform calculelor de proiectare al angrenajelor (capitolul 4) momentul de antrenare (rasucire) are valoarea: 61794 Nmm (figura 8.
in urma simularii mecanismului (efectuarea unui ciclu cinematic, respectiv cursa de ridicare al scaunului), cu optiunea Output Grapher (figura 8.5.12) s-au obtinut variatiile in timp a marimilor cinematice si cinetostatice aferente cuplelor cinematice (pozitii, viteze, acceleratii, forte si momente de reactiune)
Figura 8.5.12. Rezultatele simularii
|
Figura 8.5.13 |
Concluzii,
Ergonomia este o stiinta complexa care sintetizeaza anumite principii ale unor stiinte precum: stiintele medicale, economice, tehnice, antropometrie, psihologia muncii, sociologia muncii in scopul aplicarii acestora la proiectarea echipamentelor, a uneltelor, a mobilierului si la gasirea tuturor masurilor care sa duca la imbunatatirea conditiilor de munca. Cu toate acestea, ergonomia nu trebuie confundata cu nici una dintre stiintele care o compun. Ergonomia, fiind o stiinta, dispune de un obiect de studiu, de metode si de tehnici de cercetare proprii.
In concluzie se poate spune ca
ergonomia studiaza relatia dintre om si munca sa astfel incat
sa determine cresterea productivitatii muncii fie prin
organizarea ergonomica a locurilor de munca existente, fie prin
proiectarea ergonomica a unor noi locuri de munca. Obiectul de
studiu al ergonomiei il constituie "organizarea activitatii umane in procesul
muncii prin optimizarea relatiei din
sistemul om-masina-mediu, avand drept scop cresterea eficientei
tehnico-economice, optimizarea conditiilor satisfactiei, motivatiei si rezultatele muncii, concomitent cu mentinerea bunei
stari fiziologice si favorizarea dezvoltarii
personalitatii.
Insa aceasta optimizare, in special cea a relatiei om-masina-mediu, necesita
indeplinirea urmatoarelor conditii:
- orientarea si selectia riguroasa a factorului uman;
- reorientarea profesionala;
- proiectarea echipamentelor
in concordanta cu posibilitatile umane;
- crearea unei ambiante care
sa asigure securitate si confort;
- repartizarea rationala a
sarcinilor;
- economia energetica a
organismului uman.
Ceea ce am incercat sa realizam in cadrul acestui proiect, este sa punem in valoare stiinta de ergonomie, in special pe tema : "Proiectarea ergonomica a spatiului de actiune a soferului", in care s-au exemplificat cateva aspecte ale ingineriei ergonomice. Este adevarat ca multe lucruri se pot imbunatati, de la intreg spatiu de actiune, pina la elemente constructive ale ansamblului, iar tehnica progreseaza odata cu timpul iar noi ca ingineri trebuie sa aducem lucruri noi si benefice relatiei dintre om si munca. Ca si exemplu al unui aspect referitor la scaun, este acela ca nu multi producatori de autovehicule doteaza scaunele automobilelor cu suport lombar ce poate fi personalizat, ceea ce determina inginerii sa produca scaune ce pot fi personalizate, si bineinteles cu costuri cat mai reduse.
BIBLIOGRAFIE
Crudu, L, s.a., Atlas. Reductoare cu roti dintate, Editura
Didactica si
Pedagogica, Bucuresti, 1981
Gafiteanu, M. s.a., Organe de masini. Voi. 2. Editura Tehnica,Bucuresti,2002.
Mikios, L, Miklos Zs., Organe de masini. Transmisii mecanice,
Editura Mirton, Timisoara, 2005.
https://www.nap.edu/catalog.
https://www.human-solutions.com/automotive
https://msis.jsc.nasa.gov/sections/
https://www.safety-for-all.com/road-safety
www.ergonomics.org/
www.ergoweb.com/
www.ergonomics.org.uk/
www.apple.com/about/ergonomics/
www.iea.cc/
fkmp.uthm.edu.
www.informaworld.com
www.tc.gc.ca/roadsafety/
www.umtri.umich.edu/
www.human-solutions.com
www.thefreedictionary.com/Anthropometric
www.archeus.ro
www.informatiamedicala.ro
vol III, Editura Tehnica, Bucuresti, 1986
CUPRINS
Capitolul I 1
ELEMENTE DE ERGONOMIE 1
1. Continutul ergonomiei 1
1.1 Ergonomia - stiinta interdisciplinara 1
1.2. Scurt istoric 4
1. 3. Proiectare ergonomica 6
1.4. Productivitate, siguranta, sanatate si confort prin ergonomie 8
1.5 Sistemul ergonomic "loc de munca 9
Capitolul II 12
ANTROPOMETRIA 12
2. Antropometria 12
2.1 Antropometrie tehnica 12
2.2 Sistemul om - mijloace de munca 14
2.3 Antropometria in proiectarea locului de munca 15
2.4 Proceduri de proiectare antropometrica 20
2.5 Ingineria Antropometriei 22
2.6 Principii ergonomice de proiectare a spatiilor de lucru 30
Capitolul III 32
OMUL IN PROCESUL MUNCII 32
3.1 Capacitatea de munca 32
3.2 Factorii care determina capacitatea de munca 33
3.3 Energetica organismului uman 34
3.3.1 Activitatea musculara 35
3.3.2 Valori limita si valori normale pentru consumul de energie 36
3.3.2 Solicitarile in munca 36
3.4 Oboseala 39
Capitolul IV 44
AMBIANTA FIZICA 44
4. Iluminatul 44
Iluminarea pentru satisfactia vizuala 46
4.1.1 In spatiile de lucru 46
4.1.2 In spatiile de circulatie 47
4.1.3 Iluminatul. Factor de ambianta fizica. 48
4.2 Marimi si unitati fundamentale. 51
4.2.1 Fluxul luminos. 51
4.2.2 Intensitatea luminoasa. 52
4.2.3 Iluminarea. 53
4.2.4 Emitanta (Excitanta) Luminoasa. 53
4.2.5 Luminanta. 53
4.2.6 Eficacitatea luminoasa a radiatiilor si surselor de lumina. 53
4.2.7 Energia luminoasa si expunerea luminoasa. 54
4.3 Cromatica si culoarea 55
4.4 Zgomotul 60
4.5 Vibratiile 62
Microclimatul 63
Capitolul V 65
POZITIONAREA CORECTA IN TIMPUL CONDUCERI UNUI AUTOVEHICUL 65
Capitolul VI 70
CONFORTUL IN MASINA 70
6.1 Scaune ventilate. 70
6.2 Scaune incalzite 71
Capitolul VII 72
ANALIZA COMPORTARII CORPULUI UMAN ASEZAT PE SCAUN 72
7. DETERMINAREA ECUATIILOR PRIMARE 72
7.1 Determinarea modelului matematic 77
7.2 Stabilirea matricei de transfer 79
7.3 Construirea schemei bloc informationale 80
7.4 Construirea modelului mecanic pentru izolarea vibratiilor 82
Capitolul VIII 84
MECANISMUL DE POZITIONARE AL SCAUNULUI LA AUTOVEHICULE 84
8.1 Descrierea si functionarea mecanismului de pozitionare verticala a scaunului la automobile 84
8.1.1 Consideratii generale 84
8.1.2 Componenta mecanismului de pozitionare pe verticala a scaunului 87
8.1.3. Functionarea mecanismului de pozitionare pe verticala a scaunului 88
8.2 Sinteza mecanismului de pozitionare a scaunului la automobile 91
Consideratii generale privind sinteza mecanismelor plane 91
8.2.2. Sinteza mecanismelor plane articulate 93
8.2.3. Sinteza mecanismului de pozitionare al scaunului 97
8.2.4. Antrenarea mecanismului de pozitionare al scaunului 101
8.3 Analiza cinematica si cinetostatica al mecanismului de pozitionare al scaunului la automobile 103
Consideratii generale 103
8.3.2. Prezentarea mecanismului de pozitionare 104
8.3.3. Analiza structurala a mecanismului de pozitionare 105
8.3.4 Analiza cinematica a mecanismului de pozitionare 106
8.3.5. Analiza cinetostatica a mecanismului de pozitionare 110
8.3.6. Dimensionarea bolturilor din cuplele cinematice 114
8.4 Proiectarea motoreductorului de antrenare a mecanismului de pozitionare al scaunului 116
8.4.1 Consideratii generale 116
8.4.2. Proiectarea angrenajului melc - roata melcata 116
8.4.3. Proiectarea angrenajului cilindric - treapta 1 123
8.4.4. Proiectarea angrenajului cilindric - treapta 2 133
8.5 Analiza si simularea dinamica a mecanismului de pozitionare a scaunului la autovehicule rutiere 140
8.5.1. Introducere 140
8.5.2. Modelarea mecanismului de pozitionare al scaunului 140
5.3. Simularea dinamica a mecanismului de pozitionare 141
8.5.4 Rezultate in urma simularii 144
Concluzii.146
Bibliografie.149
|