CONDUCEREA ROBOŢILOR PRIN CONTROLERE LOGICE PROGRAMABILE
Capitolul de fata este destinat metodelor de conducere ale unor echipamente speciale cunoscute frecvent sub denumirea de controlere logice programabile (CLP). Derivând direct din automatele programabile discutate anterior, CLP-urile reprezinta ultima realizare în domeniul atât de diversificat al echipamentelor de conducere pentru procese secventiale. Proiectate initial ca simple simulatoare ale schemelor cu contacte si relee, aceste sisteme s-au impus în ultimii ani prin facilitatile deosebite pe care le ofera atît proiectantului cât si utilizatorului.
11.1. Controlere logice programabile
Controlerele programabile sunt sisteme specializate destinate acoperirii urmatoarelor functii: procesarea datelor, memorare, transfer intrare-iesire. Desi indicativul "logica-programabila" desemneaza clar existenta unor procesoare ce opereaza scalar, în prezent aceste echipamente pot prelucra de asemenea marimi numerice, deci pot interveni direct în structuri de conducere numerica modelând sau simulând bucle de reglare complexa. Un avantaj caracteristic acestor sisteme îl reprezinta posibilitatea vizualizarii programului de conducere printr-o schema tip "contacte si relee", reprezentare ladder". Aceasta reprezentare ofera programatorului un afisaj electronic extrem de familiar, capabil sa permita atât facilitati de programare cât si de urmarire a evolutiei procesului condus. Aceste controlere realizeaza deci fuziunea între o tehnica "arhaica" a schemelor cu contacte si metodele moderne de procesare ale calculatoarelor numerice.
Schema generala a unui CLP este prezentata în figura 11.1.
Figura 11.1.
UC controleaza si supervizeaza toate operatiile din interiorul CLP, transferul instructiunilor, procesarea lor si conexiunile cu exteriorul. UC este alimentata de la un generator cu cuart cu frecventa între 1 si 8 MHz (în functie de tipul microprocesorului utilizat).
Pentru memorarea programului toate CLP-urile moderne utilizeaza memorii RAM sau EPROM. Primele se folosesc pentru dezvoltarile initiale ale programului care, dupa testarea completa, este înscris în EPROM. Celelalte memorii sunt utilizate pentru stocarea unor variabile intermediare pentru realizarea imaginilor variabilelor de intrare/iesire si pentru memorarea unor functii interne: numarare, temporizare, marcare etc.
Unitatile intrare-iesire formeaza interfata între structura interna a CLP si procesul condus sau acestea vor asigura, pe de o parte izolarea CLP-ului de exterior si compatibilitatea electrica cu exteriorul a semnalelor ce intra sau sunt generate.
Operatiile interne si procesarea datelor în CLP sunt aceleasi cu ale oricarui microprocesor sau al automatelor programabile.
La faza fetch instructiunea este citita din memorie si plasata într-un registru de instructiuni pentru decodificarea ei în operatii interne (microinstructiuni) cerute de fiecare instructiune particulara. Urmeaza faza de executie a instructiunii care implica, de obicei, o prelucrare logica asupra unei variabile interne sau externe si stocarea rezultatului într-o locatie corespunzatoare. Este evident ca un loc important în aceste operatii îl joaca achizitionarea variabilelor externe.
În general exista doua modalitati de captare a variabilelor de intrare. Prima procedura implica transferul datelor de la canalul de intrare specificat în instructiune, prelucrarea lor si înscrierea rezultatului în canalul de iesire dorit, (figura 11.2a.). În al doilea caz, utilizat pentru sistemele cu un numar mare de intrari/iesiri, într-o prima faza se achizitioneaza într-un RAM toate variabilele de intrare cuplate, se executa apoi întreg programul memorându-se toate rezultatele în alta sectiune RAM si în final noile valori ale variabilelor de iesire se trimit pentru actualizare, în toate canalele de iesire cuplate la CLP (figura 11.2.b.).[121]
|
Fetch.decodificare executie instructiune |
Achizitionarea variabilei de intrare |
Fetch.decodificare executie instructiune |
Achizitionarea variabilei de intrare |
|
|
<==========> |
<==========> |
<==========> |
<==========> |
|
a)
|
Copiaza toate intrarile în RAM |
Fetch.decodificare executie pentru întregul program |
Transfer toate iesirile din RAM în canalele corespunzatoare |
|
|
<==========> |
<==================> |
<==================> |
|
b)
Figura 11.2.
11.2. Instructiuni si programarea grafica a CLP
Instructiunile utilizate în programarea CLP se înscriu în gama uzuala a instructiunilor logice având în plus caracteristici specifice rezultate din reprezentarea grafica proprie schemelor ladder.[
Diagramele ladder au fost utilizate initial pentru reprezentarea circuitelor electrice. Ulterior, introducerea controlerelor programabile si dorinta de a asigura utilizatorului aceleasi facilitati în urmarirea functionarii sau în testarea circuitelor au impus adaptarea simbolurilor circuitelor electrice în logica programabila.
O diagrama ladder, în schemele electrice, este formata din doua bare verticale ce asigura potentialul electric necesar si o retea de contacte si bobine (figura 11.3.a).
În figura 11.3.b este prezentata o reprezentare cu o logica similara cu cea oferita de schema electrica dar utilizând simboluri specifice din CLP. De# 616b12g 1;i simbolurile folosite de diverse firme nu au o standardizare riguroasa acestea încearca sa pastreze caracterul oferit de simbolurile si conexiunile electrice din care deriva.
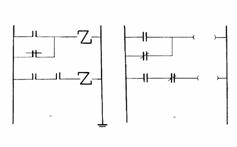
Figura 11.3
În tabelul 11.1 sunt prezentate câteva din simbolurile si instructiunile asociate, utilizate în CLP produse de firmele Texas Instruments si Mitsubishi.
În anexa 3 sînt prezentate detaliat instructiunile firmei si modul de utilizare.
|
|
Mitsubishi |
Functie |
Simbolizare grafica |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Mnemonic |
Mnemonic |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
STR |
LD |
Declara început de linie. Încarca variabila |
AND |
AND |
Conexiune serie |
OR |
OR |
Conexiune paralel |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
OUT |
OUT |
Iesiri |
Negatie |
Functii speciale |
Tabelul 11.1 Programarea CLP se poate realiza atât pe baza instructiunilor logice cât si prin programare grafica utilizând simbolurile corespunzatoare. În acest caz se permite utilizatorului sa foloseasca simbolurile familiare din structura circuitelor electrice. Modulul de programare translateaza sau compileaza aceste simboluri grafice în instructiuni logice memorate în memoria RAM. Organigrame de stari si Grafcet În capitolele anterioare, implementarea sistemelor de conducere secventiala se baza pe tehnicile oferite de organigramele (grafurile) de stari. Acestea permiteau dezvoltarea unor metode puternice de implementare asociate diverselor sisteme ce reprezentau suportul hardware. În ultimii ani în literatura de specialitate, în special în cea de provenienta franceza, s-au introdus si dezvoltat noi sisteme de reprezentare grafica a evolutiei secventiale a proceselor, cunoscute sub denumirea de Grafcet. Desi un Grafcet reda în esenta aceleasi elemente ca si o organigrama de stari, anumite particularitati de reprezentare ofera facilitati atât proiectantului cât si utilizatorului, ceea ce a dus la largirea ariei de utilizare si penetrarea metodei într-un mare numar de aplicatii. Un Grafcet este un
graf orientat definit printr-un cvadruplet - - Simbolizarea Grafcet-ului nu este unica. În literatura se pot întâlni diverse moduri de reprezentare. În figura 11.4 este prezentata o metoda utilizata frecvent în aplicatii de conducere a proceselor industriale. O secventa este reprezentata printr-un dreptunghi (sau un cerc) si definita printr-un identificator de secventa. Acesteia i se asociaza o variabila, de obicei o variabila interna, ce reprezinta suportul fizic al secventei. Asociat identificatorului de secventa si conectat direct la acesta este blocul iesirilor generate în secventa respectiva. Activarea secventei (variabilei) înseamna activarea tuturor iesirilor conectate. În aceasta reprezentare se mai poate remarca prezenta a doua conditii de tranzitie, prima desemnând conditiile pentru atingerea secventei iar a doua reprezentând conditiile pentru evolutia în secventa urmatoare. Aceste conditii reprezinta fie simple variabile externe, fie functii logice complexe obtinute prin operatori logici specializati. Conexiunile între blocurile unui Grafcet se obtin prin linii orizontale si verticale. Liniile verticale desemneaza evolutii iar cele orizontale indica posibilitati de ramificare conditionata sau nu. În figura 11.5 sunt prescurtate doua diagrame, prima ca o ramificare de tip SAU, a doua cu o ramificare sI.
Figura 11.4 În figura 11.5.a, linia orizontala A desemneaza
o evolutie fie în secventa
Figura 11.5 a Este evident ca, în functie de complexitatea
procesului condus, arborescenta Grafcet-ului
creste, în aceeasi structura putând fi întîlnite atât
ramificatii de tip sI cât si SAU precum si
configuratii ierarhizate corespunzând unor anumite grade de subordonare.
În figura 11.6 este prezentat un Grafcet
cu o astfel de structura, liniile
Figura 11.5 b Un Grafcet poate fi întotdeauna echivalat cu o organigrama (graf) de stari, complexitatea translatarii fiind data de gradul de dificultate prin care o secventa se descompune într-una sau mai multe stari. În cele mai dese cazuri o secventa corespunde unei stari si atunci asimilarea este simpla (figura 11.7). În cazurile mai complexe, fiecare secventa se înlocuieste cu un numar de stari astfel încât sa preia toata informatia continuta în aceasta. Conditiile de tranzitie sînt bineânteles pastrate. În finalul acestei prezentari s-ar putea încerca aflarea raspunsului la întrebarea "ce este de preferat, utilizarea organigramei de stari sau a Grafcet-ului?". Este evident ca nu se poate formula un raspuns transant, ambele solutii reprezentând metode adecvate de lucru. Totusi, în cazul unor procese industriale complexe, a caror evolutie implica un numar mare de stari, se poate recomanda utilizarea Grafcet-ului, numarul de secvente fiind în general mai mic decât cel al starilor si deci suportul fizic solicitat va fi mai redus.
Figura 11.6 Acest lucru va fi bine ilustrat în solutiile propuse pentru comanda unor roboti secventiali destinati unor functii de manipulare la care evident exista o diferenta mare între numarul de stari si cel al secventelor implicate în generarea traiectoriei. 11.4. Implementarea unui Grafcet Tehnica de implementare a unui Grafcet se bazeaza pe transpunerea în limbajul CLP a unei functii logice ce defineste: - set pe conditiile de tranzitie - memorarea variabilei asociate secventei; - reset pe conditiile de tranzitie Daca se noteaza prin
relatie care este identica practic cu ecuatia unui bistabil
Figura 11.7 Primul termen va defini conditia de amorsare a secventei
Aparent, relatia (11.3) ofera solutia implementarii. În realitate, aplicarea acestei formule într-o succesiune de secvente ale unui grafcet este improprie datorita hazardului de comutare produs de aceeasi variabila de conditie la setarea si resetarea a doua secvente consecutive. Pentru concretizarea ideii, sa consideram secventele
Este evident ca variabila Acest neajuns se poate remedia punând conditia ca resetarea unei secvente sa fie realizata nu de variabila de tranzitie ci de starea succesoare. Astfel, relatiile de mai sus devin :
Se poate verifica usor ca acum deficientele semnalate au fost complet eliminate. Relatia (11.3) se poate rescrie sub forma :
Generarea variabilelor de iesire se obtine fara dificultate utilizând facilitatile de alocare a iesirilor oferite de un CLP. În figura 11.8 este reprezentata diagrama ecuatiei 11.4 si instructiunile corespunzatoare.
LOD TIN AND Si-1 LOD Si ANDNOT Si+1 ORLOD ORLOD OUT Si LOD Si OUT Iesire 1 OUT Iesire 2 Figura 11.8 Reprezentarea de mai sus defineste metoda generala de implementare a unei secvente. În functie de caracteristicile problemei de conducere abordata, aceasta reprezentare poate suferi modificari cantitative care sa permita utilizarea unor elemente si proceduri speciale de implementare oferite de instructiunile unui CLP. Un exemplu în acest sens îl constituie utilizarea instructiunilor STL asociat cu variabilele 600-647. Acestea din urma au proprietatea unei celule latch, deci devin logic 1 (set) prin conditiile ce sigura activarea variabilei, memoreaza valoarea logica si se reseteaza o data cu activarea celulei urmatoare. Prin aceste proprietati aceste variabile vor constitui suporturi ideale pentru implementarea oricaror secvente. De asemenea, utilizarea instructiunii STL (instructiune de tip master) permite formarea unor bare de conexiune suplimentara pentru comanda unui numar mare de variabile. Pentru exemplificare sa consideram grafcet-ul din figura 11.9.a. Diagrama ladder asociata este prezentata în figura 11.9.b iar instructiunile corespunzatoare în figura 11.9.c. Variabila de initializare asigura conditia de set a
variabilei latch 600. Pe
a doua linie a diagramei, variabila 600 si
Figura 11.9 11.5. Conducerea unui conveior într-o instalatie robotizata de vopsire Ca o prima aplicatie se va aborda problema implementarii sistemului de conducere a unui conveior utilizat pentru transportul unor subansamble (placi) într-o instalatie robotizata de vopsire. Întregul sistem este prezentat în figura 11.10. Tehnologic, conveiorul este format dintr-un lant transportor cu o latura inferioara activa si una superioara pasiva. Latura activa contine 10 puncte de prindere în care sunt montate panourile. Acestea sunt prinse în punctul de încarcare si avanseaza secvential atât prin punctele de vopsire cât si prin cuptorul de uscare si coacere. Linia este prevazuta cu doi roboti ce asigura vopsirea
pe fiecare fata a panourilor când acestea ajung în pozitiile
Figura 11.10 Activarea functiilor de vopsire a celor doi roboti se produce ori
de câte ori un panou ajunge în pozitiile respective. De asemenea, cuptorul
este încalzit cu becuri în infrarosu care sunt aprinse numai
daca cel putin un panou se deplaseaza în zona de uscare. Trebuie
subliniat faptul ca linia nu este normal încarcata la capacitatea
maxima deci se impune întotdeauna cunoasterea exacta a
starii de încarcare a fiecarei pozitii Actionarea conveiorului este realizata secvential, cu un
tact de lucru suficient de mare pentru a permite realizarea functiilor de
vopsire în Grafcet-ul asociat operatiilor executate pe linie este prezentat în figura 11.11. Fiecarui punct de lucru
Figura 11.11 Aceste functii de memorare si de deplasare a informatiei
înmagazinate impun alegerea unui registru de deplasare ca suport al
secventelor de lucru, în consecinta s-a ales registrul definit
prin variabilele fiecare
celula
Tabelul 11.2 Alocarea variabilelor în CLP este prezentata în tabelul 11.2 iar diagrama si instructiunile de implementare în
Figura 11.12 Impulsul traductorului de deplasare TD este derivat prin instructiunea
SOT ceea ce permite formarea unui singur semnal cu o
durata egala cu cea a timpului de baleiaj al programului. Se
evita în acest fel deplasarea falsa a informapei în registru în timpul explorarilor
succesive ale programului. Impulsul este memorat în variabila interna 400
si este utilizat ca impuls de deplasare a lui SFR 0. Initializarea
registrului se realizeaza cu variabila 3 furnizata de punctul de
încarcare al liniei. Celulele Atât schema ladder prezentata cât si programul asociat demonstreaza clar, fata de complexitatea problemei abordate, eleganta si simplitatea solutiei. 11.6. Conducerea unui robot în instalatii de acoperiri galvanice În capitolul 7 au fost analizate sisteme de conducere în logica cablata pentru o instalatie robotizata de acoperiri galvanice. Se va relua acum aceasta aplicatie propunând o solutie bazata pe CLP.
Tabelul 11.3 Pentru reactualizarea datelor se va reface traiectoria robotului
specificând succesiunea secventelor functionale ce o formeaza
(figura 11.13). Se remarca posibilitatea descompunerii traiectoriei
generale în segmente cu caracteristici comune. De exemplu, secventa s.a.m.d.. Ultimele secvente sunt similare dar ciclul utilizat este inversat: ridicare - stânga - coborâre.
Figura 11.13 În figura 11.14 se poate urmari grafcet-ul traectoriei. Se poate remarca
divizarea grafului în doua parti, una pentru secventele de
baza Pentru implementarea acestui grafcet s-au utilizat variabilele interne 600-623 care pot functiona în regim de latch, functia set fiind definita de conditiile specifice de comutare impuse de evolutia procesului iar resetarea fiind realizata automat odata cu activarea variabilei urmatoare. Diagrama ladder a întregului sistem de conducere si alocarea corespunzatoare a variabilelor se pot urmari în figura 11.15 si tabelul 11.3. Prin variabila de initializare 1 se activeaza variabila 600 ce
defineste secventa
În finalul subrutinei se utilizeaza instructiunea END ceea ce determina reluarea programului la adresa 0. Întrucât variabila 623 era activa, aceasta va determina practic reluarea secventelor începând cu linia variabilei 601. Procedura continua în acest fel realizând calea principala a grafcet-ului si apelând succesiv la subrutina ciclului. Programul detaliat de implementare se obtine transpunând diagrama în instructiunile CLP corespunzatoare:
Figura 11.15
11.7. Conducerea unui manipulator ce deserveste un cuptor de tratare termica Se va relua exemplul prezentat în capitolul 9 propunându-ne implementarea sistemului de conducere pe un CLP utilizând reprezentarea prin grafcet (figura 11.16). Se remarca, în acest caz, identitatea notiunii de stare cu cea de secventa. În consecinta grafcetul reda destul de exact forma organigramei de stari, diferente putând fi notate în cazul deciziilor ierarhizate ale organigramei care în grafcet devin linii orizontale de ramificare. Implementarea secventelor se obtine pe baza relatiei (11.4). În consecinta expresiile logice ale secventelor vor fi: Aceste relatii vor constitui nucleul diagramei ladder, la acestea adaugându-se logica de numarare si functiile de iesire (figura 11.16).
Tabelul 11.4 Programul de conducere va fi:
Figura. 11.16. a)
Figura 11.16.b) Se remarca utilizarea unui bloc de numarare CNT 1 programat pentru numararea pîna la valoarea 5. Continutul acesteia este testat prin FUN 201 pentru valori acumulate ce depasesc 1,2,3. Prin iesirile respective 207,208,209 se determina de fapt conditiile NUM1,NUM2,NUM3. Conditia NUMO se obtine prin simpla complementare a conditiei 207. 11.8. Conducerea unui robot în coordonate cilindice Se va analiza în continuare posibilitatea implementarii unui sistem de conducere pentru un robot în coordonate cilindrice ce deserveste o celula de prelucrare. Celula este alimentata cu piese neprelucrate printr-o banda transportoare, piesele fiind dispuse ordonat pe palete, câte 8 pe fiecare paleta în grupe de câte 4 (figura 11.17). Robotul transfera succesiv piesele în punctul de prelucrare (presa) urmând o traiectorie impusa. Figura 11.17 Initial robotul se gaseste în punctul A. Bratul
avanseaza în punctul Robotul, pe cele doua axe r, dispune de doua tipuri de traductoare de masura, incremental pentru axa r si absolut pentru axa . Prezenta acestor doua tipuri de traductoare ofera posibilitatea utilizarii facilitatilor de calcul numeric pe care le ofera un CLP. Grafcet-ul sistemului de conducere este prezentat în figura 11.18. în
secventa În cadrul unei secvente se genereaza iesirea necesara dar totodata se impun prelucrari numerice corespunzatoare cerintelor impuse de fiecare secventa de miscare. Aceste prelucrari nu apar explicit în grafcet dar ele sînt prezentate detaliat în diagrama ladder asociata (figura 11.19).
Se remarca prezenta unei ramificatii de tip SAU generata în secventa s8. Conditiile de evolutie pe anumite ramuri sunt determinate de numarul de piese manipulat si identificat în secventa s7. Astfel, dupa 4 piese sau 8 piese manipulate, evolutia se realizeaza pe ramurile doi si trei ce determina initializarea parametrilor si r pe anumite valori. În celelalte cazuri, evolutia se realizeaza pe prima ramura.
Figura 11.18. b)
Figura 11.19
Tabelul 11.5 Fiecare secventa din grafcet este transpusa în diagrama printr-un numar de instructiuni logice si aritmetice. Secventa În secventa Secventa Într-o maniera similara sunt implementate si celelate secvente. Trebuie remarcata realizarea functiei de contorizare a pieselor prin numarul CNTO (adresa 900), impulsul de numarare fiind obtinut din varibila 3 (griper deschis) la fiecare depunere a piesei în punctul de prelucrare. Testarea continutului numaratorului este obtinuta prin instructiunile FUN100/4 si FUN100/8 ce identifica numarul 4 si respectiv 8 al pieselor depuse. Variabilele asociate 214, 215 permit implementarea ramificatiei de tip paralel din grafcet. Pe baza diagramei astfel stabilite se obtine programul de conducere. Un fragment din program este prezentat mai jos.
11.9. Implementarea algoritmilor de reglare Sistemele CLP echipate cu canale de intrare de tip analogic pot realiza operatii matematice asupra marimilor de intrare achizitionate si transfera rezultatul direct, prin modulele de iesire, în sistemele de actionare ale articulatiilor mecanice ale robotilor. Nivelul si complexitatea algoritmului de control depinde de viteza si capacitatea de operare a controlerului. În mod uzual un CLP poate realiza algoritmi de reglare de timp proportional utilizabili în sistemele de actionare hidraulice. În sistemele de actionare electrica un astfel de control este nesatisfacator, performantele realizate fiind departe de cerintele impuse. În capitolul 4 s-a pus în evidenta faptul ca majoritatea aplicatiilor de conducere impune un control PID atât asupra pozitiei cât si al vitezei (eventual PI). Pentru implementarea unor astfel de algoritmi se utilizeaza doua proceduri. CLP-urile standard contin o subrutina rezidenta în memorie ce se apeleaza la cerere si se actualizeaza conform parametrilor impusi. Termenii matematici necesari sunt aproximati cu o precizie rezonabila ceea ce impune un timp mare de procesare. În ansamblu metoda se poate aprecia ca o metoda nu prea rapida. O solutie mai aceptabila consta în introducerea unor module inteligente PID ce contin atât canalele de intrare - iesire necesare cât si un microprocesor specializat pentru calculul matematic aferent. Acest procesor opereaza în paralel cu unitatea centrala a CLP absolvind-o de toate calculele implicate de algoritm, acesta având rolul numai de actualizarea a parametrilor în memoria ROM a modulului. În plus, modulul poate realiza procesari ale semnalului de intrare, filtrare, netezire, facându-1 compatibil cu calculele matematice ulterioare. Utilizarea algoritmilor PID printr-o diagrama ladder implica apelarea unui meniu care specifica: valoarea prescrisa, intrarea masurata, blocul PID apelat, valorile numerice ale coeficientilor PID precum si iesirea utilizata.
Figura 11.20 Aplicarea algoritmului PID cere definirea anterioara a marimilor
implicate în constructia sa. Astfel, valorile numerice ale marimilor
de intrare si iesire se memoreaza în registre de date pe 16
biti D000 - D100, respectiv D200 - D300. De asemenea coeficientii
sunt memorati în trei registre succesive, pe diagrama indicându-se adresa primului registru (D300). În figura 11.20 este prezentat un exemplu de implementare PID. În registrul
D142 se înscrie valoarea numerica prescrisa, registrul D086
memoreaza valoarea numerica a intrarii, identificatorul 012
determina blocul PID apelat, registrele D300,D301,D302 stocheaza
coeficientii Document InfoAccesari: 3117 Apreciat: Comenteaza documentul:Nu esti inregistratTrebuie sa fii utilizator inregistrat pentru a putea comenta Creaza cont nou A fost util?Daca documentul a fost util si crezi ca meritasa adaugi un link catre el la tine in site in pagina web a site-ului tau.
Copyright © Contact (SCRIGROUP Int. 2025 ) |

 LOD Tinit
LOD Tinit