STUDIUL DINAMICII STATISTICE PRIN REGRESIE
1. SERII DINAMICE DISCRETE. AUTOREGRESII
O serie experimentala discreta se poate exprima sub o forma generala, de exemplu pentru o marime oarecare y:
![]() (3)
(3)
Dupa cum se constata, valoarea curenta a marimii y, deci y(k), se exprima in functie de valorile din trecut ale acesteia; relatia (3) contine regresori de ordin diferit. In plus, expresia (3) poate constitui o regresie (recurenta) liniara sau neliniara [8, 66]. S-a constatat ca eroarea de modelare scade o data cu cresterea ordinului regresiei.
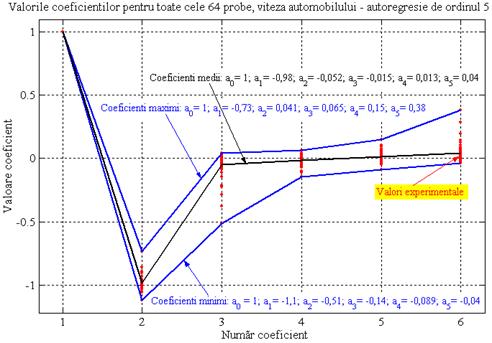 |
Graficul din fig.7 arata ca majoritatea valorilor coeficientilor este plasata in zone concentrate din intreaga plaja de variatie; este sugerata astfel o generalizare, in sensul utilizarii valorilor medii ale coeficientilor. Ca urmare, din fig.7 rezulta autoregresia de ordiul 5 obtinuta cu valorile medii ale coeficientilor
 (8)
(8)
ce poate fi folosita pentru orice proba experimentala din cele 64 vizate.
2. REGRESII LINIARE SIMPLE
Regresiile simple sunt cele care au o marime rezultativa si numai o marime factoriala [8, 120].
Determinarea parametrilor dreptei de regresie se poate face cu metoda punctelor selectionate sau cu metoda celor mai mici patrate, ultima fiind cea mai folosita. Astfel, acestia se determina prin minimizarea sumei patratelor diferentelor dintre valorile experimentale si cele obtinute prin regresie [8; 93]. In final se obtin expresiile:
 (10)
(10)
in
care n reprezinta numarul
datelor experimentale; in relatiile (10) intervin si mediile aferente
si s-au folosit alte notatii, un exemplu reprezentandu-l marimea
x pentru care s-a notat ![]() .
.
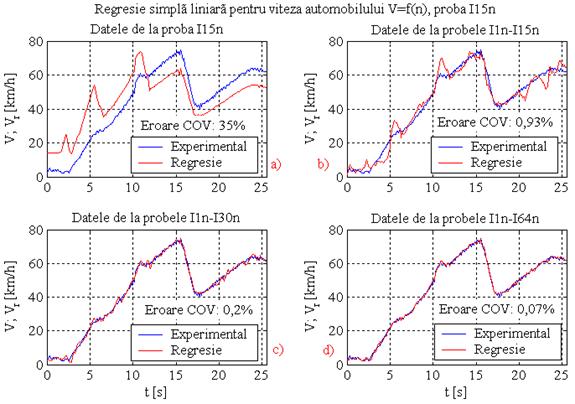
Asa cum se constata din fig.13, precizia de modelare a dinamicii automobilului prin regresie liniara simpla creste o data cu luarea in considerare a mai multor probe experimentale pentru dependenta vitezei V in functie de turatia n a motorului. Din studiul realizat a mai rezultat ca regresia simpla liniara nu ofera totdeauna modele matematice care sa satisfaca o precizie acceptabila, erorile obtinute fiind prea mari.
3. REGRESII LINIARE MULTIPLE
Regresiile multiple sunt cele care au o marime rezultativa si mai multe marimi factoriale; in cazul general, pot fi mai multe marimi rezultative si mai multe variabile factoriale [20].
O regresie liniara multipla, cu y marimea rezultativa si x1, x2, , xp un numar de p variabile factoriale, este descrisa matematic prin relatia:
 |
 (11)
(11)
unde (.) reprezinta coeficientii modelului (parametrii regresiei multiple); ca si la regresia simpla, 0 reprezinta ordonata la origine, iar y si x(.) marimi vectoriale [8, 120, 135].
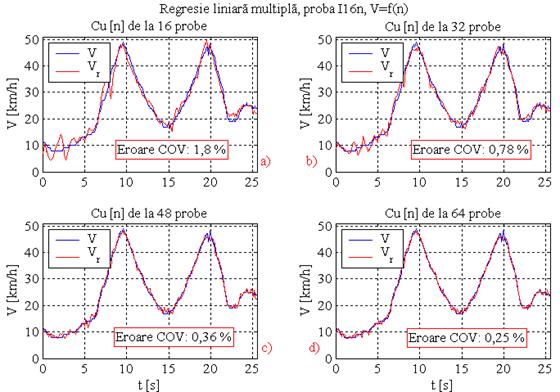
De asemenea si la regresia multipla liniara este valabila observatia ca cu cat numarul datelor experimentale este mai mare (mai multe probe), cu atat precizia modelarii este mai ridicata, fig.21.
4. REGRESII NELINIARE SIMPLE
Obtinerea regresiilor neliniare este mai dificila, datorita inexistentei unei teorii generale unitare ca la cele liniare; din acest motiv, de cele mai multe ori studiul sistemelor neliniare decurge pe cazuri particulare. Exista totusi si unele tratari unitare la regresiile neliniare, dar valabile tot numai pentru anumite cazuri particulare, ca de exemplu la modelele parametrice polinomiale.
Astfel, la o regresie neliniara simpla cu y marimea rezultativa si x variabila factoriala, modelul parametric polinomial are forma generala
 (17)
(17)
In fig.38 se prezinta un model generalizat pentru toate cele 64 probe experimentale, cu regresii ale momentului motor functie de pozitia clapetei obturatoare. Se constata ca erorile COV cresc in cazul general, deci precizia de modelare scade o data cu marirea numarului datelor experimentale, adica invers fata de cazul regresiilor liniare. In plus, se constata o analogie valorica a coeficientilor regresiilor prezentate.
Dezavantajul esential al regresiilor neliniare polinomiale este acela ca nu pot oferi modele pentru studiul dependentei dintre unele marimi functionale dorite, deoarece coeficientii descrierilor matematice sunt constanti; pentru cazul dinamicii automobilului nu se pot oferi decat modele de tipul celor prezentate fig.38.
In schimb, modelarea cu functii spline ofera descrieri matematice cu coeficienti variabili si de aceea se poate modela orice variatie functionala cu precizie maxima.
Pentru functia spline de ordinul k, fig.40, polinomul de interpolare pentru marimea oarecare x cu n valori discrete are forma particulara:
 (56)
(56)
cu intervalul dintre doua puncte i si coeficientii polinomiali locali cji [20; 135].
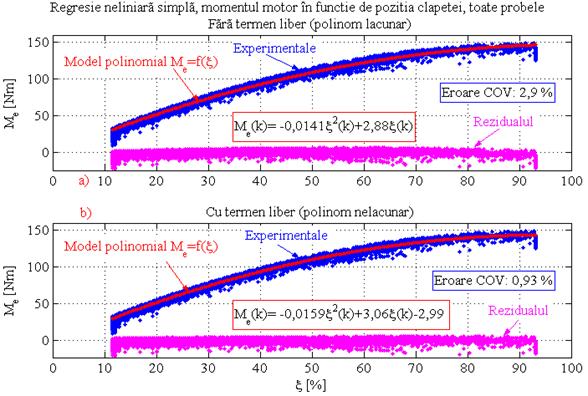
Fig.38
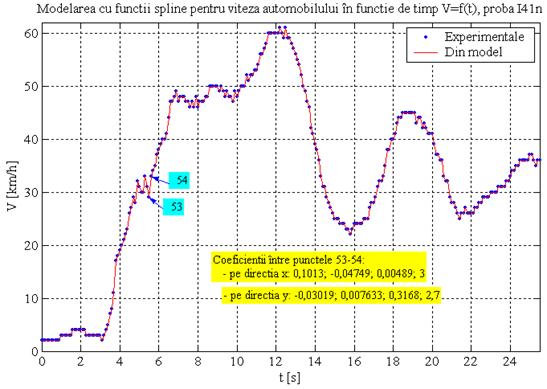
Fig.40
5. REGRESII NELINIARE MULTIPLE
Problema obtinerii regresiilor neliniare multiple este si mai dificila decat la cele neliniare simple. Diferite procedee apeleaza la modele polinomiale, functii spline, retele neuronale, algoritmi bootstrap si tehnici bayesiene in continuare sunt utilizate doar primele doua din acestea [94; 131; 135].
Regresiile polinomiale neliniare multiple sunt similare celor liniare multiple, dar exista si diferite puteri ale marimilor factoriale. De exemplu, pentru y marime rezultativa si variabile factoriale, relatia (11) devine in acest caz pentru situatia unui polinom nelacunar de ordinul doi:
![]() (57)
(57)
unde reprezinta vectorul parametrilor regresiei [135].
In partea superioara a graficului din fig.50 sunt redate expresiile pentru regresia neliniara multipla valabila la toate probele experimentale, ce ofera variatia mometului motor Me in functie de turatia n si pozitia clapetei . Graficul ce contine valorile erorilor COV pentru toate probele, arata ca regresiile adoptate asigura o precizie foarte mare.
In schimb, regresiile multiple neliniare din fig.52, la care marimea rezultativa este viteza automobilului V, iar variabile factoriale turatia n si pozitia clapetei obturatoare nu mai asigura o precizie acceptabila. Acest exemplu
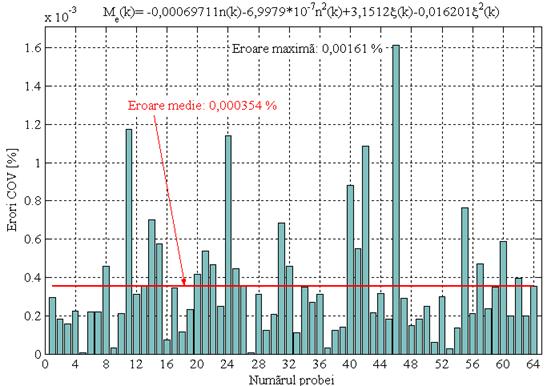
Fig.50
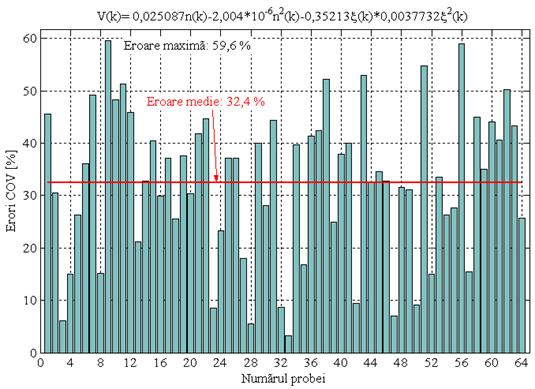
Fig.52
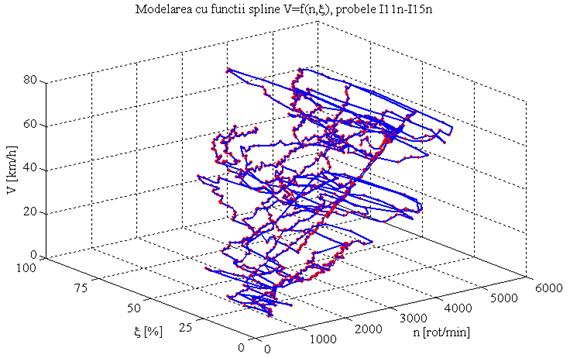
Fig.56
confirma aspectul mentionat anterior referitor la dificultatea stabilirii regresiilor polinomiale neliniare multiple care sa asigure erori acceptabile.
Se poate deci concluziona ca pentru un anumit caz concret, modelul matematic adoptat, conditionat de erori acceptabile, poate fi liniar sau neliniar.
In fig.56 se prezinta rezultatul modelarii cu functii spline pentru stabilirea unei regresii multiple neliniare care sa ofere dependenta vitezei de deplasare V in functie de turatia n si pozitia clapetei obturatoare ; din motive de vizibilitate, pe grafic sunt redate doar cinci probe experimentale (I11n-I15n).
REGRESII LINIARE MULTIPLE GENERALIZATE
Studiul efectuat a evidentiat un aspect important in plan teoretic si practic: cu cat numarul datelor experimentale este mai mare, cu atat dinamica automobilului poate fi descrisa mai bine de modele matematice liniare, domeniu in care exista o teorie unitara si coerenta. Din acest motiv, este posibila folosirea unor regresii liniare multiple generalizate, deci care sa beneficieze de toate datele experimentale avute la dispozitie (toate probele) pentru mai multe variabile factoriale si o anumita marime rezultativa sau mai multe
Daca, de exemplu, se utilizeaza o regresie de forma unui polinom lacunar, atunci se poate scrie expresia in forma matriceala desfasurata astfel:
 (66)
(66)
in
care n reprezinta numarul
datelor experimentale, p numarul
variabilelor factoriale, iar
parametrii regresiei; exista deci vectorul de valori ![]() ale marimii
rezultative, matricea
ale marimii
rezultative, matricea ![]() a variabilelor
factoriale si vectorul parametrilor regresiei
a variabilelor
factoriale si vectorul parametrilor regresiei ![]() [20; 120; 135].
[20; 120; 135].
In cazul regresiilor liniare
multiple generalizate exista mai multe variabile factoriale (de
acelasi tip sau de tipuri diferite), dar si mai multe marimi
rezultative (de acelasi tip sau de tipuri diferite). Ca urmare, expresia (15)
ramane valabila si aici, dar exista matricea de valori ![]() ale marimii
rezultative (anterior r=1), matricea
ale marimii
rezultative (anterior r=1), matricea ![]() a variabilelor
factoriale si matricea parametrilor regresiei
a variabilelor
factoriale si matricea parametrilor regresiei ![]() :
:
 (67)
(67)
In sensul celor prezentate, pentru dependenta
vitezei V de la toate probele
experimentale in functie de turatia n si pozitia clapetei obturatoare de la toate probele, tablourile matriceale au valorile n=256 linii, p=128 coloane (64 pentru n
si 64 pentru ), r=64 coloane (ale vitezei) si deci
exista ![]() coeficienti (4096
pentru n si 4096 pentru ).
coeficienti (4096
pentru n si 4096 pentru ).
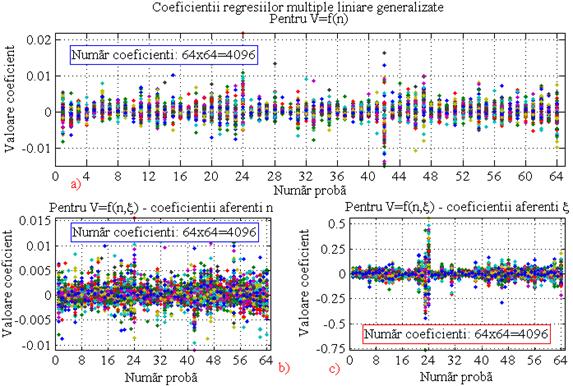
Spre exemplu, in cazul regresiei V=f(n,) cu valorile de la toate cele
64 probe experimentale se obtin coeficientii din fig.60b si fig.60c.
Fig.60
Se poate concluziona ca studiul prin regresie al dinamicii statistice a autovehiculelor asigura evidentierea unor dependente functionale intre diferitele marimi ale acestora. Asa cum s-a constatat din exemplele prezentate, pentru automobilele cu control electronic exista dependente care nu se intalnesc la autovehiculele clasice, datorita supervizarii functionarii de ansamblu de catre calculatorul de bord; folosirea unor regresii multiple cu marimi rezultative de tip diferit, neutilizate in literatura de specialitate clasica, asigura depistarea unor dependente utile in controlul electronic, unde se aplica legi de reglare complexe.
Trebuie mentionat inca un aspect de mare importanta teoretica si practica. Daca se stabilesc regresii liniare multiple generalizate cu date experimentale care acopera toata plaja functionala a unui autovehicul (multitudinea de marimi senzorizate), atunci studiul prin regresie a dinamicii statistice a acestuia poate asigura si predictia in cazul altor situatii decat cele de la incercari; aspectul este similar cazului cand se dispune de caracteristici statice si se stabilesc valorile marimilor pentru orice punct functional din plaja de variatie a acestora.
|
