ALTE DOCUMENTE
|
||||||||||
MODELAREA MATEMATICA PRIN METODE STOHASTICE A PROCESULUI DIN CUPTORUL DE CLINKER
4.3.1. Introducere
În ultimii ani, datorita consumului mare de energie electrica, s-au cautat alte modalitati de conducere a procesului din cupto 959j93j rul de clinker. O solutie preconizata este implementarea unui sistem de control digital Într-un proces uscat pentru un cuptor de 1000 t/zi.
Actual, cuptorul de ciment este condus manual de operatori, desi procesul cuptorului era prevazut cu bucle de reglare conventionale. Sistemul propus poate fi realizat cu un microcalculator INTEL SBC 80/20. Sistemul de control digital contine, În principal, un controler multivariabil varianta minima si un controler adaptiv.
Îmbunatatirea atât a timpului de productie, cât si a economisirii de combustibil, a fost stabilita fara modificarea calitatii clinkerului.
4.3.2. Modelul procesului si metode de identificare
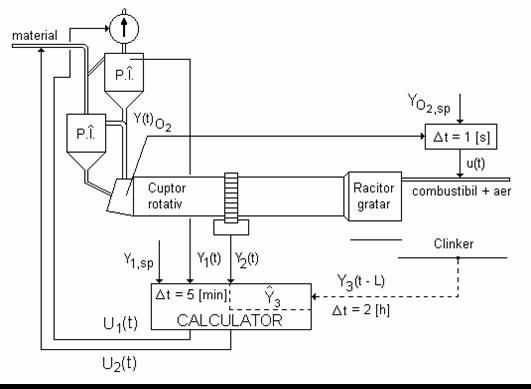
Procesul uscat al cuptorului este prezentat În figura de mai jos:
|
|
Deoarece perturbatiile ce apar În cadrul procesului sunt În principal de natura stohastica se impune o modelare prin metode stohastice.
În continuare, este prezentata o scurta descriere a modelului procesului (MP) stohastic liniar si o metoda pentru estimarea parametrilor modelului În functie de datele reale.
Se considera MP stohastic liniar multivariabil În timp discret descris de:
y(t+1) + A1y(t) + ... + AnAy(t-nA+1) = B0u(t) + ... + BnBu(t-nB) + C1e(t) + + ... +CnCe(t-nC+1) + e(t+1) (3.3.1)
unde y - vector de iesire;
u - vector de intrare;
e(t)- secventa de vectori aleatori independenti de distributie gaussiana, având valoarea medie zero si covarianta:
Ee(t)*e(t) = R (3.3.2)
Se introduce operatorul de Întârziere q -1 definit de:
q-1y(t) = y(t-1) (3.3.3)
si polinoamele matriciale:
A(z) = I + A1z +... + AnAznA
B(z) = B0 + B1z + ... + BnBznB C(z) = I + C1z +... + CnCznC (3.3.4)
Ecuatia (3.3.1) mai poate fi scrisa:
A(q-1)y(t+1) = B(q-1)u(t) + C(q-1)e(t+1) (3.3.5)
Modelul din (3.3.1) si (3.3.5) este reprezentarea unui sistem esantionat multivariabila finit dimensional cu perturbatii care se supun distributiei gaussiene, având densitate spectrala rationala.
Estimarea parametrilor
Se considera perechile de intrare-iesire u(t), y(t), t=1,2...Nsymbol 125 \f "Symbol" \s 13 generate de procesul real.
Problema identificarii poate fi Înteleasa ca o problema a determinarii parametrilor optimi ai modelului dat de relatia (3.3.1) În conformitate cu niste criterii specificate. Una din cele mai cunoscute metode de identificare este metoda maximei probabilitati.
Utilizând structura de model (3.3.1) se poate arata ca maximizarea functiei de probabilitate e echivalenta cu minimizarea functiei de eroare:
V = det  (3.3.6)
(3.3.6)
unde ![]() - eroarea de
predictie Între model si iesirile reale.
- eroarea de
predictie Între model si iesirile reale.
Minimizarea relatiei (3.3.6) În acord cu parametrii este o problema neliniara si de acces, ea poate fi rezolvata prin metode numerice de optimizare.
Numarul parametrilor utilizati În MP se poate determina prin minimizarea criteriului teoretic informational al lui Akaike:
AIC = (N-1)log(V) + ( 1-ny)(N-1)log(N-1) + ny(N-1)(1+log2p) + 2np (3.3.7)
unde N - numarul de esantioane,
V - minimul relatiei (3.3.6);
ny - numarul de iesiri;
np - numarul de parametri ai MP.
Identificarea experimentala
![]() Scopul identificarii
experimentale este obtinerea modelului partii total
controlate de operator si nu a celei necontrolate.
Scopul identificarii
experimentale este obtinerea modelului partii total
controlate de operator si nu a celei necontrolate.
Doua variabile primare manipulate În cuptorul rotativ sunt: debitul de combustibil si debitul total de gaz evacuat , fiecare dintre acestea avand un
efect important În transferul de caldura si indirect În caracteristicile reactiilor.
Actual, ca combustibil e folosita pacura sau gazul, concentratia de O2 În gaz evacuat este controlata de debitul de combustibil, utilizând o bucla de control conventionala.
Variabila manipulata este viteza de iesire de control care corespunde cantitatii de caldura introduse În cuptor. Aceasta este considerata ca o prima variabila de control u1(t) În modelul de identificare.
Variabilele conventionale utilizate În operarea cuptorului rotativ includ, de asemenea, viteza de rotatie a cuptorului - ce controleaza timpul de stationare a materialului si rata de alimentare cu material neprelucrat a cuptorului ce controleaza rata productiei.
Actual, viteza cuptorului este reglata În functie de arta de alimentare cu material neprelucrat, În vederea manipularii ratei de alimentare fara modificari semnificative a Încarcarii interne. Viteza de rotatie este considerata ca a doua variabila de control u2(t).
Desi, exista si alte variabile posibile de manipulat În operarea cuptorului, variabilele mentionate sunt cele mai importante din cadrul cuptorului actual, si identificarea procesului experimentala se reduce la aceste doua intrari.
Deoarece, procesul
din cuptor e stabil, interactiunea dintre racitorul gratar si cuptor cauzeaza
comportari oscilatorii ale cantitatii de caldura care intra În cuptor. O
cale de eliminare a acestei probleme este de a mentine
temperatura gazului de combustie la o valoare
În plus, pentru identificarea procesului, una dintre iesiri trebuie sa includa informatii despre calitatea clinkerului . Deoarece calitatea clinkerului poate fi masurata (off-line) abia la iesirea materialului din cuptor si este analizata, din considerente practice, doar la interval de 2h, este dificila utilizarea acestei masuri de calitate pentru control. Din experienta, s-a constatat ca puterea motorului de actionare a cuptorului este corelata cu temperatura zonei de ardere si calitatea clinkerului.
Analizând datele culese din experimentul de identificare se poate gasi modelul liniar:
log(y3(t+20min)) = ay2(t) + b + e(t) (3.3.8)
unde y2(t) - puterea de antrenare a motorului;
y3(t) - continutul de free line În clinker.
Deci, puterea motorului poate fi considerata ca una din iesirile MP ce urmeaza a fi identificat, mai ales ca poate fi masurata.
Valorile numerice ale tuturor variabilelor, exceptând continutul de free line În clinker (procente din greutate) si temperatura gazului la iesire (procente din scara 0-1000 C) pot fi date În absenta unitatilor de masura.
Stuctura modelului
Dupa ce s-a stabilit care variabile sunt intrari si care iesiri, urmatoarea problema este estimarea parametrilor. Se propune utilizarea urmatoarei structuri de MP:
A(q-1)y(t+1) = B(q-1)u(t) + C(q-1)e(t+1) + d (3.3.9)
unde
y(t+1) = y1(t+1); y2(t+1) T
si e - temperatura gazului de combustie În primul Încalzitor;
u(t) = u1(t); u2(t) T
u1 - fluxul de energie ce intra În cuptor;
u2 - debitul de material ce intra În cuptor;
e(t) - secventa de vectori independenti aleatori cu valoarea medie zero si covarianta:
Ee(t)T = R
d - vector cu parametrii constanti, dar necunoscuti;
A(q-1), B(q-1), C(q-1) - polinoamele matricilor definite de (3.3.4).
Pentru obtinerea parametrilor necunoscuti ai MP, se utilizeaza metoda maximei probabilitati.
Proprietatile de convergenta a câtorva metode de identificare recursive simple a secventelor actuale de date au fost testate. Numarul de parametri utilizati În MP (3.3.9) a fost testat prin minimizarea criteriului teoretic informational Akaike.
Modelul obtinut cu metode maximei probabilitati si minimizând criteriul lui Akaike va contine 11 parametri În urmatoarea structura:
y(t+1) = A1y(t) + B0u(t) + C1e(t) + e(t+1) + d (3.3.10)
Matricea de covarianta reziduala estimata se va calcula cu:
![]() =
= 
unde ![]() - predictia cu un
pas Înainte a modelului MP.
- predictia cu un
pas Înainte a modelului MP.
Iesirea determinista se calculeaza cu:
y(t+1)d = A1y(t)d + B0u(t) + d (3.3.12)
si arata cât de mult din iesirea y(t) poate fi determinata cu intrarea u(t).
|