SERVOMOTORUL ASINCRON BIFAZAT
1. SCOPUL SI OBIECTIVELE LUCRARII.
Scopul: aplicarea in practica a metodelor de reglare a turatiei servomo-toarelor asincrone bifazate si determinarea caracteristicii me 141b13b canice a acestor tipuri de servomotoare.
Obiectivele urmarite:
reglarea turatiei prin modificarea amplitudinii tensiunii de comanda, prin variatia capacitatii de defazaj, respectiv reglajul mixt al turatiei;
determinarea caracteristicii mecanice naturale, n = f(M) si a unei caracteristici mecanice artificiale, la o tensiune de excitatie Ue < Uen.
2. MEMENTO TEORETIC.
Se presupune ca infasurarea de excitatie a servomotorului este alimentata de la o retea monofazata, cu tensiunea ue, circuitul de comanda fiind intrerupt (vezi figura 1).
Infasurarea monofazata de excitatie produce un camp magnetic pulsator, cu repartitie sinusoidala in spatiu, camp care poate fi descompus in doua cam-puri invartitoare care se rotesc in sensuri opuse, cu aceeasi viteza si amplitudini egale cu jumatate din amplitudinea campului magnetic pulsator:
Fig. 1. Schema de principiu a servomotorului asincron bifazat.
Asupra rotorului vor actiona doua cupluri
electromagnetice: Md,
direct si Mi, de sens
invers (figura 2). Cuplul de pornire va fi, evident, nul si motorul nu
poate porni singur. In domeniul 0 < s
< 1, campul direct va produce un cuplu activ, iar campul invers un cuplu
de franare. Pentru domeniul 1 ![]() s
s ![]() 2, situatia
se inverseaza. Cuplul rezultant este suma celor doua cupluri, M = Md + Mi,
valoarea sa fiind nula pentru s = 1.
2, situatia
se inverseaza. Cuplul rezultant este suma celor doua cupluri, M = Md + Mi,
valoarea sa fiind nula pentru s = 1.
Problema pornirii este rezolvata prin cea de a doua infasurare, de coman-da, decalata in spatiu, fata de infasurarea de excitatie, cu 90 grade electrice.
Campul magnetic rezultant produs de cele doua infasurari, decalate in spatiu, reprezinta un camp invartitor, echivalent cu cel al unei masini asincrone trifazate, iar servomotorul va prezenta un cuplu de pornire corespunzator.
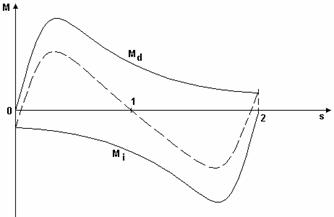
Fig. 2. Caracteristica mecanica a servomotorului
asincron monofazat.
Pentru a putea fi utilizat in sisteme automate, servomotorul asincron tre-buie sa se opreasca ferm la disparitia semnalului de comanda, proprietate ce nu este prezenta la motorul asincron clasic. Pentru realizarea acestei conditii se utilizeaza o colivie tip pahar cu rezistenta ohmica echivalenta ridicata. Aceas-ta asigura atat autofranarea la disparitia semnalului de comanda, cat si o func-tionare stabila a servomotorului in domeniul turatiilor cuprinse intre zero si turatia nominala.
2) Reglajul turatiei servomotorului asincron bifazat.
Figura 3. Metode de comanda a servomotorului
asincron bifazat.
3. METODOLOGIA LUCRARII.
1) Reglajul turatiei prin variatia amplitudinii tensiunii de comanda.
turatia, n = 0÷1200 rot/min; puterea consumata, Pc,max = 12 VA;
valoarea capacitatii condensatorului de defazare, C = 1μF.
Montajul propus este incorporat intr-un stand de laborator destinat exclusiv testarii servomotoarelor de acest gen.
4. PRELUCRAREA DATELOR EXPERIMENTALE.
Cu ajutorul datelor din tabelele 1 si 2, se traseaza grafic dependen-tele n = f(Uc) si n = f(φ).
Se reprezinta grafic curba n = f(Uc), pentru trei valori ale unghiului de defazaj si doua valori ale tensiunii de excitatie, in acelasi sistem de coordonate (tabelul 3).
Se traseaza grafic, in acelasi sistem de coordonate, caracteristica meca-nica naturala a servomotorului asincron bifazat, n = f(M), respectiv carac-teristica mecanica artificiala, pentru Ue = 0,8∙Uen (tabelul 4).
Se trag concluzii asupra timpului de oprire a servomotorului, in momentul disparitiei semnalului de comanda.
5. PROBLEME DESCHISE.
Enumerati cateva procedee utilizate pentru imbunatatirea performantelor servomotoarelor asincrone bifazate.
Pentru o anumita valoare a capacitatii de defazare, C, utilizata in cadrul incercarilor, la Ue = Uen si Uc = Ucn, calculati unghiul de defazaj φ, dintre Ue si Uc si comparati rezultatul obtinut cu valoarea masurata.
Estimati variatia cuplului electromagnetic dezvoltat de servomotor, in functie de timp, la functionarea in pozitie orizontala, daca incarcarea servomo-torului se face prin atasarea la ax a unei greutati (cazul standului de incercare disponibil in laborator).
|
