Modelarea matematica a interactiunii mecanice
1. Generalitati
Def.: interactiunea mecanica dintre doua sau mai multe sisteme mecanice este acel tip de interactie fizica ce are ca rezultat final doar modificarea sau nu a starilor mecanice ale acestora, adica modificarea sau nu a pozitiilor lor intr-un reper fixat.
Pentru a vedea cum stau lucrurile in detaliu, adica
pentru a pune in acord teoria cu experienta astfel incat sa putem
modela matematic acest tip de interactie, vom considera cazul elementar:
un sistem mecanic martor (de proba),
Q ce interactioneaza
mecanic cu mediul sau exterior, pe care il consideram un alt sistem
mecanic W, (spunem ca cele
doua sisteme au fost aduse in contact mecanic), suferind un fenomen
mecanic notat simbolic in cele ce urmeaza cu ![]() .
.
In cadrul modelarii matematice a interactiunii mecanice, trebuie mai intai sa observam ca modelul ce dorim sa-l construim depinde decisiv de doi factori:
- modelul sistemului mecanic Q;
- modelul fenomenului mecanic suferit de acesta, ![]() .
.
Asadar, inainte de a trece la operatiunea anuntata in titlul paragrafului, trebuie sa revedem clasificarile celor doua notiuni, clasificari ce vor determina clasele de modele matematice ale interactiunii mecanice:
- model de sistem mecanic:
- punct material;
- sistem de puncte materiale;
- solid rigid;
- solid (mediu continuu) deformabil;
- camp;
- model de fenomen mecanic:
- fenomen mecanic elementar (modelabil matematic) direct:
- translatie;
- rotatie;
- repaus;
- rototranslatie;
- fenomen mecanic indirect (legatura).
In paragrafele urmatoare vom trata pe rand toate cazurile distincte - din puctul de vedere al modelarii matematice a interactiunii mecanice care rezulta din clasificarile anterioare.
2. Modelarea matematica a interactiunii mecanice care genereaza fenomene mecanice directe
2.1. Modelarea matematica a interactiunii mecanice care genereaza fenomene mecanice directe in cazul punctului material. Forta ca vector determinat
Ca urmare a definitiei acestui sistem mecanic, fenomenele mecanice directe pe care le poate suferi sunt doar repausul si translatia; nu are sens sa vorbim despre rotatia sau rototranslatia punctului material.
In cazul interactiunii mecanice a punctului material Q cu mediul sau mecanic exterior W, experienta arata ca modificarile (deplasarile acestuia) induse in sistemul Q se produc cu o anumita intensitate (sunt mai mari sau mai mici) si in mod directionat (deplasari pe sau in jurul anumitor directii si in anumite sensuri).
Modelul matematic ce inglobeaza aceste caracteristici ale interactiunii mecanice este, evident, cel de vector. El are un punct de aplicatie bine determinat (spre deosebire de cazul mediilor continue), anume punctul geometric ce modeleaza matematic punctul material.
Acest model este confirmat si de alte fapte experimentale: daca asupra lui Q actioneaza doua sisteme mecanice W1 si W2, atunci, cunoscand efectul fiecarei interactiuni in parte, efectul total se poate construi prin regula paralelogramului, in sensul ca modificarea globala a pozitiei sistemului este data de diagonala mare a paralelogramului construit cu modificarile individuale. Ori aceasta este chiar regula de compunere a (adunarea) vectorilor. In acelasi mod se poate verifica orice alta proprietate vectoriala a interactiunilor mecanice.
Prin urmare:
- modelul matematic al interactiunii mecanice exercitata asupra
punctului material este un vector bine determinat (cu intensitate,
directie sens si origine) ce se noteaza uzual cu ![]() si se
numeste forta.
si se
numeste forta.
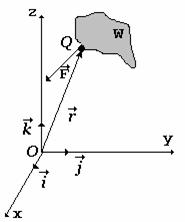
Fig. 14
De fapt, mai mult, avem de-a face cu o functie vectoriala ce depinde (explicit sau implicit) atat de spatiu si timp, cat si de sistemul mecanic caruia ii aplicata:
|
|
|
Discutie:
Expresia analitica efectiva (122) a fortelor modelabile matematic nu este accesibila din punct de vedere teoretic. Exista o infinitate de tipuri de interactiuni mecanice; dintre acestea foarte putine sunt teoretizabile, in sensul ca foarte putine admit simplificari convenabile din punct de vedere teoretic - astfel incat sa se poata postula, pe baza determinarilor experimentale, o expresie analitica si experimental astfel incat rezultatele obtinute sa concorde cu experienta in limite acceptabile. Fiecare dintre acestea fac obiectul cate unui capitol distinct al fizicii:
- forta elastica oscilatii mecanice,
- forta de frecare tribologie,
- forta gravitationala gravitatie etc.
2.2. Modelarea matematica a interactiunii mecanice care genereaza fenomene mecanice directe in cazul sistemului de puncte materiale. Forte exterioare si forte interioare
Evident, vom avea de-a face cu acelasi model matematic ca in cazul punctului material, insa multiplicat cu N, numarul de particule componente ale sistemului.
Este de mentionat insa o distinctie cu caracter doar generic intre doua categorii de forte ce actioneaza asupra punctelor componente (nu exista nici o deosebire legata de modelarea matematica intre aceste tipuri de forte):
- forta exterioara - este modelul matematic al actiunii mec 727j98h anice a mediului exterior sistemului mecanic asupra punctelor materiale componente ale acestuia:
|
|
|
- forta interioara - este modelul matematic al interactiunilor mecanice reciproce dintre punctele materiale ce constituie sistemul mecanic considerat, luate doua cate doua:
|
|
|
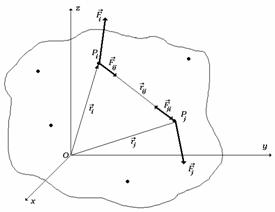
Fig. 15
Prin urmare:
- modelul matematic al interactiunii mecanice exercitata asupra
sistemului de N puncte materiale este un sistem de forte format din
doua subsiteme de vectori bine determinat (cu intensitate, directie
sens si origine): N forte exterioare descrise de relatia (123)
si ![]() forte interioare descrise de relatia (124).
forte interioare descrise de relatia (124).
2.3. Modelarea matematica a interactiunii mecanice care genereaza fenomene mecanice directe in cazul solidului rigid
Discutie
Prin natura acestui sistem, el poate modela fenomene mecanice directe de cel mai general tip. Asa cum spuneam, cele modelabile matematic sunt rototranslatiile. Vom arata intr-un capitol ulterior (la cinematica si dinamica solidului rigid) ca, din puctul de vedere al procesului de modelare matematica, acestea sunt decompozabile in fenomene elementare de translatie si rotatie (in sistemul de referinta legat de centrul de masa), concluziile finale putandu-se obtine printr-o anumita suprapunere a rezultatelor obtinute din studiul acestor fenomene componente.
Se impune astfel studiul separat al fenomenelor de translatie si rotatie si modelarea matematica corespunzatoare.
2.3.1. Cazul fenomenului elementar de translatie.
Forta ca vector alunecator
Ca urmare a definitiei fenomenului mecanic elementar de translatie (variatie numai a coordonatelor liniare), situatia considerata in acest paragraf este similara intr-o masura extrem de mare celui legat de fenomenele mecanice in care sistemul mecanic este modelabil printr-un punct material. Modelarea matematica a interactiunii mecanice responsabila de producerea translatiei rigidului solid va fi data tot de notiunea de vector, pastrandu-se aceeasi denumire de forta.
Singura deosebire este legata de caracterul finit al solidului rigid (fata de punctul material): actiunea mecanica asupra acestuia, in mod real, nu se face intr-un singur punct - aceasta situatie reprezentand, evident, un caz ideal, teoretic - ci intr-o zona finita a sistemului - pe o suprafata sau intr-un anumit volum(de exemplu, cazul fortelor de frecare distribuite pe suprafata de contact). Se foloseste termenul de forta distribuita.
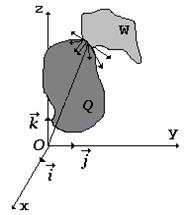
Fig. 16
In cele mai multe cazuri distributia fortei nu se poate determina, in sensul ca sunt foarte putine situatiile in care se poate scrie o expresie analitica a acestui vector in punctele de interactiune (numai in cazurile cu o anumita simetrie - distributii uniforme, triunghiulare, campuri de forte cunoscute etc.). Pentru a se evita acest inconvenient se apeleaza la caracterul de vector al fortei, lucrandu-se uzual in cazul solidului rigid cu rezultanta fortei distribuite (suma vectoriala a fortelor sistemului). Aceasta este un vector unic care, spre deosebire de punctul material nu va mai avea un punct unic de aplicatie, acesta putand fi ales convenabil in oricare punct al dreptei suport a acestui vector. Se spune in acest caz ca forta este vector alunecator.
Prin urmare:
- modelul matematic al actiunii mec 727j98h anice care determina
translatia solidului rigid il constituie un vector alunecator (cu
intensitate directie si sens) numit forta, notat uzual cu ![]() .
.
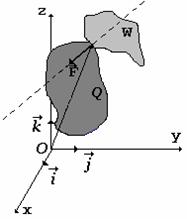
Fig. 17
2.3.2. Cazul fenomenului elementar de rotatie.
Momentul fortei in raport cu un punct si in raport cu o axa
Experienta evidentiaza faptul ca rotatia solidului rigid nu depinde numai de cele trei caracteristici ale fortei; in mod suplimentar, efectul de rotatie al interactiunii mecanice, depinde si de regiunea din sistem unde se produce aceasta (sau echivalent, de punctul sau axa la care il raportam).
Studiul experimental al acestui efect (pe cazuri simple cunoscute: cilindri, discuri, bare etc.) a relevat faptul ca modelul matematic cel mai adecvat pentru descrierea efectului de rotatie al interactiunii mecanice cuprinde doua notiuni: produsul vectorial si produsul mixt.
Vom considera mai in detaliu dezvoltarea acestor modele matematice.
Tipuri de momente ale fortei
Pentru concretizarea celor doua modele sa
consideram modelul matematic dezvoltat pana acum: spatiul
matematic E3, reperul
natural cartezian Oxyz, o
dreapta D de versor ![]() sau unghiuri
directoare (a b g), un sistem mecanic Q si o forta
sau unghiuri
directoare (a b g), un sistem mecanic Q si o forta ![]() ce actioneaza asupra acestuia in punctul
ce actioneaza asupra acestuia in punctul ![]() . Cu aceste consideratii avem:
. Cu aceste consideratii avem:
Def.: modelul matematic al efectului de rotatie indus de forta in sistem in raport cu originea (arbitrara) O este vectorul alunecator (acest efect fiind caracterizat de intensitate, directie si sens).
|
|
|
numit momentul (polar al) fortei ![]() in raport cu punctul (polul) O.
in raport cu punctul (polul) O.
Def.: modelul matematic al efectului de rotatie indus de forta in sistem in raport cu axa D este scalarul (acest efect este caracterizat doar de intensitate si sens, directia fiind data de axa considerata)
|
|
|
numit momentul (axial al) fortei ![]() in raport cu (axa) D
in raport cu (axa) D
Discutii:
Prin urmare, vectorul moment polar si scalarul moment axial nu mai sunt arbitrare, determinabile numai prin experienta, ca in cazul fortei; acestea sunt un vector, respectiv un scalar ce depind de forta respectiva si de punctul de aplicatie al acesteia prin relatiile postulate. Ele vor admite o expresie analitica daca si numai daca forta la care se refera admite o astfel de forma.
Daca O I D atunci vom avea relatia evidenta:
|
|
|
Proprietati fundamentale ale momentelor fortei
a) Daca punctul de aplicatie al fortei se muta din A in A, celelalte caracteristici ale fortei ramanand neschimbate, momentul polar se modifica conform formulei
|
|
|
Dem.:
|
|
|
b) Daca polul se muta din O in O, momentul polar se modifica dupa relatia
|
|
|
Dem.:
|
|
|
c) (consecinte) Momentul polar al fortei este invariant fata de alunecarea (glisarea) acesteia pe suportul sau si fata de deplasarea polului pe o dreapta paralela cu suportul fortei (caracterul de vector alunecator al fortei nu afecteaza deci nici modelul matematic de moment al fortei respective).
d) Momentul fortei este nul daca forta este nula sau suportul acesteia trece prin pol.
e) Forta, ca vector liber (punct de aplicatie complet arbitrar), si momentul acesteia determina unic dreapta suport a vectorului alunecator forta.
Dem.:
Notand cu ![]() vectorul de
pozitie al unui punct oarecare al axei D pe care se poate deplasa forta
vectorul de
pozitie al unui punct oarecare al axei D pe care se poate deplasa forta ![]() , avem, conform definitiei:
, avem, conform definitiei:
|
|
|
Inmultind vectorial la stanga cu vectorul de pozitie si tinand cont de egalitatea vectoriala
|
|
|
obtinem:
|
|
|
Ultima relatie reprezinta ecuatia vectoriala canonica a dreptei suport a fortei.
Asadar un vector alunecator ![]() este caracterizat de vectorul liber
este caracterizat de vectorul liber ![]() si de vectorul
moment,
si de vectorul
moment, ![]() , unde
, unde ![]() . Putem astfel admite reprezentarea
. Putem astfel admite reprezentarea ![]() cu
cu ![]() pentru vectorul alunecator forta. Vectorul
liber, in aceasta reprezentare se numeste vector principal.
pentru vectorul alunecator forta. Vectorul
liber, in aceasta reprezentare se numeste vector principal.
In sfarsit, apeland la proiectii pe trei axe carteziene se obtine pentru vectorul alunecator reprezentarea in asa-numite coordonate pluckeriene:
|
|
|
f) Momentul axial al fortei este invariant fata de alunecarea acesteia pe suportul sau.
g) Momentul axial al fortei este nul daca forta este nula sau daca aceasta este coplanara cu axa.
h) Momentul axial se
poate exprima ca produs reciproc al vectorilor alunecatori ![]() :
:
|
|
|
(demonstratiile sunt imediate).
2.3.3. Cazul fenomenului elementar de rototranslatie.
Reducerea unei forte in raport cu punct (pol)
Asa cum spuneam anterior, vom vedea ca in anumite conditii (in sistemul de referinta al centrului de masa), rototranslatia rigidului se descompune intr-o translatie si o rotatie care se pot analiza separat; ca urmare este util teoretic - in cadrul modelului matematic ce il construim - sa reusim separarea pura a efectului de rotatie creat de sistemul de forte de cel de translatie.
Problema admite o solutie unica numita reducerea sistemului de forte in raport cu polul dat la un torsor. Aceasta solutie va fi prezentata in cele ce urmeaza. Sunt insa necesare anumite consideratii preliminare.
Cuplul de forte
In acest paragraf vom analiza in sensul propus un sistem de doua forte particular dar de mare importanta pentru consideratiile ce urmeaza.
Def.: se numeste cuplu de forte un sistem de doua forte egale ca marime, avand aceeasi directie (suporturi paralele) si sensuri opuse.
Modelul matematic al acestui sistem de interactiuni
mecanice va fi, evident, sistemul de forte ![]() , cu precizarea ca suporturile celor doi vectori
opusi si egali ca marime sunt doua drepte paralele. Sa
analizam in continuare efectele mecanice ale acestui sistem:
, cu precizarea ca suporturile celor doi vectori
opusi si egali ca marime sunt doua drepte paralele. Sa
analizam in continuare efectele mecanice ale acestui sistem:
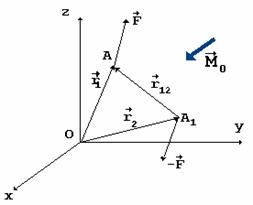
Fig. 18
a) efectul de translatie
Efectul de translatie al fiecarei interactiuni componente este modelat matematic, asa cum afirmam si anterior, chiar de vectorii forta respectivi. Ca urmare, efectul global va fi modelat matematic de suma acestor vectori; avem insa
|
|
|
ceea ce conduce la urmatoarea concluzie importanta:
- cuplurile de forte nu produc efecte de translatie a sistemelor mecanice asupra carora actioneaza.
b) efectul de rotatie
Analog considerand un pol oarecare, modelul matematic al efectului de rotatie al cuplului va fi dat de suma momentelor polare ale celor doua componente ale sale in raport cu polul fixat (acestea fiind marimi vectoriale); cu notatiile din figura avem:
|
|
|
Marimea vectoriala notata cu ![]() se numeste momentul cuplului. Conform
consideratiilor anterioare, aceasta este modelul matematic al efectului de
rotatie al cuplului de forte considerat.
se numeste momentul cuplului. Conform
consideratiilor anterioare, aceasta este modelul matematic al efectului de
rotatie al cuplului de forte considerat.
Este remarcabil faptul ca, asa cum reiese din expresia sa, momentul cuplului este un vector liber; el nu depinde in nici un fel de polul fixat, avand aceeasi valoare pentru orice pol din spatiu. Daca vom alege polul in punctul de aplicatie al uneia din forte, A, rezulta, in primul rand ca momentul cuplului este perpendicular pe planul fortelor.
Concluzie importanta:
Cuplul de forte este modelul unui sistem de interactiuni mecanice cu efect pur de rotatie (fara nici un efect de translatie) si reciproc (daca un sistem de interactiuni mecanice produce numai efect de rotatie asupra unui sistem mecanic, atunci modelul sau mecanic se poate considera a fi un cuplu de forte). Din aceasta cauza modelul matematic al acestui sistem de interactiuni mecanice si reprezentarea sa grafica se pot reduce la momentul cuplului, ca vector liber (putand fi localizat oriunde in spatiu).
Reducerea unei forte in raport cu un punct (pol)
Fie o forta ![]() ce
actioneaza asupra rigidului solid Q
in punctul A (posibil a reprezenta
rezultanta unui sistem oarecare de forte ce actioneaza asupra
sistemului mecanic). Daca in punctul B
A vom introduce un sistem de interactiuni
mecanice nul
ce
actioneaza asupra rigidului solid Q
in punctul A (posibil a reprezenta
rezultanta unui sistem oarecare de forte ce actioneaza asupra
sistemului mecanic). Daca in punctul B
A vom introduce un sistem de interactiuni
mecanice nul ![]() , efectul mecanic global nu se va modifica; spunem ca
sistemul de forte
, efectul mecanic global nu se va modifica; spunem ca
sistemul de forte ![]() este echivalent mecanic cu forta
initiala. Conform discutiei din paragraful dedicat cuplului de
forte, acest sistem echivalent poate fi distribuit teoretic astfel:
este echivalent mecanic cu forta
initiala. Conform discutiei din paragraful dedicat cuplului de
forte, acest sistem echivalent poate fi distribuit teoretic astfel:
putem considera ca asupra sistemului
actioneaza forta ![]() in punctul B, si cuplul de forte
in punctul B, si cuplul de forte ![]() al carui moment il notam cu
al carui moment il notam cu ![]() si care este egal cu momentul fortei initiale
in raport cu polul B.
si care este egal cu momentul fortei initiale
in raport cu polul B.
Prin aceste operatii de inlocuire a fortei initiale am obtinut, in final urmatorul sistem echivalent cu aceasta din punct de vedere mecanic:
|
|
|
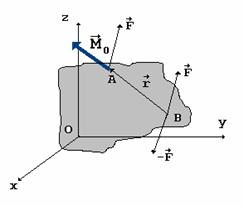
Fig. 19
Sa analizam sistemul mecanic echivalent obtinut:
in raport cu punctul considerat, B, forta ![]() nu va produce decat efect mecanic de translatie (sau
deformare) a sistemului Q - momentul acesteia in raport cu acest punct fiind
nul - iar cuplul
nu va produce decat efect mecanic de translatie (sau
deformare) a sistemului Q - momentul acesteia in raport cu acest punct fiind
nul - iar cuplul ![]() doar efect mecanic de rotatie, reprezentand cuplul de
forte descris.
doar efect mecanic de rotatie, reprezentand cuplul de
forte descris.
Intreaga operatie descrisa pana aici se
numeste reducerea fortei ![]() in raport cu punctul
(polul) B.
in raport cu punctul
(polul) B.
Putem spune deci ca prin acest procedeu am realizat in
mod echivalent mecanic decuplarea efectelor de translatie si
rotatie in raport cu punctul B ce alcatuiesc fenomenul global de
rototranslatie al suferit de rigidul solid in urma actiunii mecanice
modelata matematic de forta ![]() .
.
Sisteme de forte. Reducerea sistemului de forte in raport cu un pol. Torsorul
Situatia in care asupra unui solid rigid se exercita o singura interactiune mecanica este o situatie ideala (teoretica). In universul real asupra oricarui sistem mecanic se exercita o numeroase de interactiuni mecanice in acelasi timp. Pentru a ne mentine in limite modelabile si a ne apropia mai mult de situatia reala (fata de cazul ideal) putem neglija pe cele care nu ne intereseaza sau au efecte extrem de reduse in raport cu cele studiate, astfel ca putem considera sisteme numarabile (finite sau nu) ori distributii continue de acelasi tip de interactiuni mecanice actionand simultan asupra unui solid rigid dat. In mod corespunzator, conform discutiilor anterioare, modelarea matematica a acestora va fi:
|
|
|
Problema principala ce se ridica este urmatoarea:
nu putem sa lucram cu atatea forte si nici nu ne intereseaza; cunoastem efectul mecanic al fiecareia dintre acestea si ne intereseaza care este efectul global al sistemului de interactiuni, modelarea matematica a acestuia pe baza modelelor matematice individuale.
Consideram in continuare cazul mai general al unui
sistem discret de forte, ![]() , ce modeleaza matematic un sistem de interactiuni
macanice corespunzator ce actioneaza asupra rigidului solid Q si fie O un pol fixat (un punct de interes). Reducand fiecare componenta a sistemului
in raport cu polul O prin metoda
descrisa anterior, vom putea inlocui sistemul F prin sistemul de sisteme echivalent mecanic
, ce modeleaza matematic un sistem de interactiuni
macanice corespunzator ce actioneaza asupra rigidului solid Q si fie O un pol fixat (un punct de interes). Reducand fiecare componenta a sistemului
in raport cu polul O prin metoda
descrisa anterior, vom putea inlocui sistemul F prin sistemul de sisteme echivalent mecanic ![]() . Grupand elementele acestui sistem echivalent pe forte
si momente, il vom putea scrie ca:
. Grupand elementele acestui sistem echivalent pe forte
si momente, il vom putea scrie ca:
|
|
|
Avem astfel doua subsisteme: unul format din forte avand punctul de aplicatie in O, deci numai cu efect de translatie, iar unul format numai din cupluri de forte, deci numai cu efect de rotatie. Cele doua efecte globale vor fi date, conform modelului matematic construit pana acum, de sumele vectoriale ale elementelor celor doua subsisteme, notate:
|
|
|
Denumirile si semnificatiile celor 3 noi elemente introduse de aceste consideratii privind modelarea matematica a sistemului de forte ce actioneaza asupra solidului rigid sunt urmatoarele:
![]() - rezultanta sau vectorul principal al sistemului de forte in
punctul O; este modelul matematic al efectului total de translatie
(si deformare) in raport cu punctul O al sistemului de actiuni
mecanice considerat;
- rezultanta sau vectorul principal al sistemului de forte in
punctul O; este modelul matematic al efectului total de translatie
(si deformare) in raport cu punctul O al sistemului de actiuni
mecanice considerat;
![]() - momentul rezultant
al sistemului de forte in raport cu polul O; este modelul matematic al
efectului total de rotatie in raport cu punctul O al sistemului de
actiuni mecanice considerat;
- momentul rezultant
al sistemului de forte in raport cu polul O; este modelul matematic al
efectului total de rotatie in raport cu punctul O al sistemului de
actiuni mecanice considerat;
![]() - torsorul (de reducere al) sistemului de forte in raport cu polul O;
este modelul matematic general al sistemului de interactiuni mecanice
considerat in care sau separat efectele de translatie si cel de
rotatie.
- torsorul (de reducere al) sistemului de forte in raport cu polul O;
este modelul matematic general al sistemului de interactiuni mecanice
considerat in care sau separat efectele de translatie si cel de
rotatie.
Discutie:
Trebuie subliniat faptul important ca vectorul
forta ![]() nu reprezinta
rezultanta efectiva a sistemului de forte considerat, adica nu
este modelul matematic al acestuia; asa cum am spus, ea este modelul
matematic al componentei de translatie al efectului mecanic al sistemului
de forte. Modelul matematic al acestui sistem va fi, cum am spus,
torsorul, element care cuprinde si efectul de rotatie. Analitic,
rezultanta totala si reala a sistemului de forte este suma
vectoriala a fortelor
nu reprezinta
rezultanta efectiva a sistemului de forte considerat, adica nu
este modelul matematic al acestuia; asa cum am spus, ea este modelul
matematic al componentei de translatie al efectului mecanic al sistemului
de forte. Modelul matematic al acestui sistem va fi, cum am spus,
torsorul, element care cuprinde si efectul de rotatie. Analitic,
rezultanta totala si reala a sistemului de forte este suma
vectoriala a fortelor ![]() ca vectori legati,
cu punctul de aplicatie in Ai,
in timp ce vectorul principal este suma vectoriala a acelorasi
vectori, dar liberi, neavand astfel
un punct de aplicatie definit. In acest sens, pentru acest vector ar fi
mai adecvata denumirea de vector
principal al sistemului de forte decat cea de rezultanta.
ca vectori legati,
cu punctul de aplicatie in Ai,
in timp ce vectorul principal este suma vectoriala a acelorasi
vectori, dar liberi, neavand astfel
un punct de aplicatie definit. In acest sens, pentru acest vector ar fi
mai adecvata denumirea de vector
principal al sistemului de forte decat cea de rezultanta.
Intrucat torsorul este o notiune atat de importanta, ne intereseaza proprietatile sale; mai exact ne intereseaza modul in care acesta se modifica la modificarea punctului de reducere si ce anume ramane neschimbat (invariantii). Cu privire la aceste aspecte avem urmatoarele consideratii:
a) variatia torsorului cu punctul de reducere
Fie O un alt
punct de reducere. Deoarece este o suma de vectori liberi deci ea
insasi un vector liber - rezultanta ![]() nu se va modifica la
schimbarea facuta. Momentul rezultant se va modifica insa. Cu
notatiile din figura urmatoare, avem:
nu se va modifica la
schimbarea facuta. Momentul rezultant se va modifica insa. Cu
notatiile din figura urmatoare, avem:
|
|
|
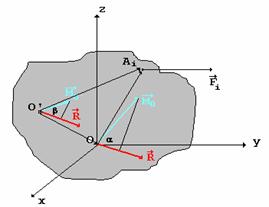
Fig. 20
b) invariantii torsorului la schimbarea punctului de reducere
Din consideratii anterioare reiese ca primul invariant este chiar vectorul principal.
Apoi, daca inmultim scalar ultima relatie
cu acest vector si tinem seama ca ![]() obtinem imediat relatia:
obtinem imediat relatia:
|
|
|
care scrisa cu cosinusurile unghiurilor notate in figura devine
|
|
|
Aceasta ne evidentiaza un al doilea invariant al torsorului: proiectia momentului rezultant pe directia rezultantei sistemului de forte.
c) momentul minim al torsorului
Atunci cand in sistemul mecanic considerat (solidul rigid) nu avem nici un punct de reducere remarcabil, prin considerarea unor puncte diferite vom obtine torsori diferiti; acest fapt nu este convenabil din punctul de vedere a modelarii matematice mai multe modele matematice pentru aceeasi notiune mecanica! Este deci necesar sa stabilim un criteriu care sa aleaga intre punctele de reducere, astfel incat sa obtinem acelati torsor in raport cu acestea.
Dupa cum s-a aratat momentul rezultant este un vector variabil cu punctul de reducere, dar astfel incat proiectia sa pe rezultanta ramane constanta. Rezulta ca vom putea gasi puncte de reducere pentru care marimea torsorului sa ia valoarea minima, egala cu cea a acestei proiectii, adica componenta normala pe rezultanta sa fie nula. Obtinerea acestui moment minim va constitui criteriul cautat pentru alegerea unor puncte remarcabile de reducere a sistemelor de forte.
Sa vedem in continuare care sunt aceste puncte cat este vectorul minim si care sunt punctele de reducere pentru care se obtine.
Fie O un pol de reducere oarecare. Asa cum am spus valoarea momentului minim va fi data de proiectia momentului rezultant pe vectorul principal care, fiind un invariant al torsorului este aceeasi in cazul oricarui punct de reducere:
|
|
|
In ceea ce priveste momentul minim ca vector, directia acestuia nu poate fi alta decat cea a rezultantei, orice alta directie implicand o componenta normala nenula pe directia rezultantei. Ca urmare, avand modulul de mai sus si directia rezultantei, momentul minim va fi dat de relatia:
|
|
|
unde am notat cu ![]() , expresie care este si ea un invariant al torsorului
(derivata, ca si momentul minim din invariantii fundamentali),
numita parametrul torsorului.
, expresie care este si ea un invariant al torsorului
(derivata, ca si momentul minim din invariantii fundamentali),
numita parametrul torsorului.
Discutie
Momentul minim se poate obtine si din conditia analitica de minim, impunand ca derivata momentului general al torsorului in raport cu un parametru variabil (de exemplu cu unghiul facut cu rezultanta) sa fie 0.
Fie acum P un punct in raport cu care reducerea sistemului de forte conduce la un torsor avand ca element momentul minim. Conform expresiei de mai sus a momentului minim si a relatiei de transformare a momentului rezultant la schimbarea punctului de reducere rezulta ca P va trebui sa satisfaca relatia vectoriala:
|
|
|
De subliniat ca in aceasta relatie necunoscuta
este vectorul de pozitie al lui P
fata de O, notat ![]() , celelalte elemente fiind calculabile din cunoasterea
sistemului de forte considerat. Pentru a scoate vectorul necunoscut din
relatia anterioara se procedeaza in mod clasic pentru
situatiile in care avem produse vectoriale: inmultim la stanga
vectorial cu
, celelalte elemente fiind calculabile din cunoasterea
sistemului de forte considerat. Pentru a scoate vectorul necunoscut din
relatia anterioara se procedeaza in mod clasic pentru
situatiile in care avem produse vectoriale: inmultim la stanga
vectorial cu ![]() si
transformam produsul vectorial dublu cu relatia utilizata
anterior:
si
transformam produsul vectorial dublu cu relatia utilizata
anterior:
|
|
|
Obtinem succesiv:
|
|
|
unde am notat ![]() ; aceasta este ecuatia unei drepte paralela cu
; aceasta este ecuatia unei drepte paralela cu ![]() si situata
la distanta ro de O. Aceasta dreapta este deci
locul geometric al tuturor punctelor pentru care prin reducerea sistemului de
forte dat se obtine torsorul minim (ce contine momentul minim)
si se numeste axa centrala a sistemului de forte.
si situata
la distanta ro de O. Aceasta dreapta este deci
locul geometric al tuturor punctelor pentru care prin reducerea sistemului de
forte dat se obtine torsorul minim (ce contine momentul minim)
si se numeste axa centrala a sistemului de forte.
Pe componente (orice ecuatie vectoriala este echivalenta cu trei ecuatii scalare in care sunt implicate rspectiv proiectiile vectorilor pe axele de coordonate) ecuatia axei centrale va fi:
|
|
|
sau, eliminand parametrul p:
|
|
|
Discutie:
Reducerea unui sistem de forte la torsorul minim este unica! Aceasta pentru ca, asa cum am vazut, elementele acestuia sunt invariante. Prin urmare acest torsor poate fi considerat ca modelul matematic concret al sistemului de forte, cu sens unic, fara ambiguitati. Odata construit acest torsor, el inlocuieste echivalent sistemul de forte dat, fara a mai fi necesara nici o precizare suplimentara. (nu trebuie sa precizam punctul de reducere ca in cazul altui torsor neminimal).
d) tipuri de torsori
In functie de anularea uneia sau ambelor componente ale torsorului putem avea urmatoarele cazuri de reducere a sistemelor de forte:
![]() spunem ca sistemul
de forte este echivalent cu zero; un astfel de sistem de
forte nu are nici un efect mecanic. El nu va schimba starea mecanica
a sistemului mecanic asupra caruia actioneaza; spunem ca
sub actiunea acestui sistem de forte sistemul se afla in echilibru
mecanic. Prin urmare, conditia generala, necesara
si suficienta ca un sistem mecanic sa se afle in echilibru
mecanic este ca sistemul fortelor ce actioneaza asupra sa
sa fie echivalente cu zero, conditie care se scrie analitic sub
forma:
spunem ca sistemul
de forte este echivalent cu zero; un astfel de sistem de
forte nu are nici un efect mecanic. El nu va schimba starea mecanica
a sistemului mecanic asupra caruia actioneaza; spunem ca
sub actiunea acestui sistem de forte sistemul se afla in echilibru
mecanic. Prin urmare, conditia generala, necesara
si suficienta ca un sistem mecanic sa se afle in echilibru
mecanic este ca sistemul fortelor ce actioneaza asupra sa
sa fie echivalente cu zero, conditie care se scrie analitic sub
forma:
|
|
|
![]() spunem ca avem un
sistem
de forte echivalent cu o forta; aceasta
forta unica va fi situata pe axa centrala. Un astfel
de sistem de forte nu va avea decat un efect de translatie asupra
sistemului mecanic asupra caruia actioneaza.
spunem ca avem un
sistem
de forte echivalent cu o forta; aceasta
forta unica va fi situata pe axa centrala. Un astfel
de sistem de forte nu va avea decat un efect de translatie asupra
sistemului mecanic asupra caruia actioneaza.
![]() spunem ca avem un
sistem
de forte echivalent cu un cuplu de forte; momentul cuplului
echivalent va fi momentul minim.
spunem ca avem un
sistem
de forte echivalent cu un cuplu de forte; momentul cuplului
echivalent va fi momentul minim.
![]() spunem ca sistemul
de forte este echivalent cu un torsor complet; pentru torsorul
minim in acest caz se mai utilizeaza si denumirile de dinama,
rasucitor sau surub.
spunem ca sistemul
de forte este echivalent cu un torsor complet; pentru torsorul
minim in acest caz se mai utilizeaza si denumirile de dinama,
rasucitor sau surub.
e) teorema lui Varignon generalizata
Sa consideram in continuare un sistem de forte relativ particular, in sensul ca torsorul sau minim este echivalent cu o forta (momentul minim este nul). In acest caz, daca O este un pol oarecare, reducand sistemul de forte in raport cu acest pol obtinem un torsor complet avand momentul rezultant dat de relatia:
|
|
|
unde ![]() este vectorul de
pozitie al punctului de reducere O
fata de originea rezultantei aflata pe axa centrala
(punctul in raport cu care am calculat torsorul minim). Am obtinut astfel
forma analitica a teoremei lui Varignon generalizata
care afirma urmatoarele:
este vectorul de
pozitie al punctului de reducere O
fata de originea rezultantei aflata pe axa centrala
(punctul in raport cu care am calculat torsorul minim). Am obtinut astfel
forma analitica a teoremei lui Varignon generalizata
care afirma urmatoarele:
momentul rezultant al unui sistem de forte echivalent cu o forta in raport cu un punct O este egal cu momentul rezultantei in raport cu acelati punct, rezultanta fiind situata pe axa centrala.
5. Reducerea unor sisteme particulare de forte
5.1. Reducerea sistemelor de forte concurente
Fie un sistem de forte concurente intr-un punct.
este convenabil sa alegem acel punct ca origine O. In raport cu acesta, avem ![]() astfel ca
momentul rezultant va fi nul. Prin urmare orice sistem de forte concurente
este echivalent cu o forta.
astfel ca
momentul rezultant va fi nul. Prin urmare orice sistem de forte concurente
este echivalent cu o forta.
Vom avea atunci doua cazuri distincte de reducere:
![]() sistemul mecanic
caruia ii este aplicat sistemul de forte este in echilibru;
sistemul mecanic
caruia ii este aplicat sistemul de forte este in echilibru;
![]() sistemul de forte
se reduce la o forta unica ce trece prin O.
sistemul de forte
se reduce la o forta unica ce trece prin O.
5.2. Reducerea sistemelor de forte coplanare
a) Torsorul de reducere
Fie ![]() un sistem de
forte situate in planul (P); alegem un sistem de axe carteziene astfel
incat (P) = (xOy). Avem atunci:
un sistem de
forte situate in planul (P); alegem un sistem de axe carteziene astfel
incat (P) = (xOy). Avem atunci:
|
|
|
Asadar rezultanta sistemului este situata in acelasi plan cu fortele componente si are expresia de mai sus.
Analog, pentru momentul rezultant se obtine:
|
|
|
Aceasta relatie, pe langa faptul ca ne ofera expresia analitica a momentului rezultant ne spune ca acesta este normal la planul fortelor.
b) Cazurile de reducere
![]() sistemul de forte este echivalent cu zero; sub
actiunea acestui sistem de forte sistemul se afla in echilibru
mecanic.
sistemul de forte este echivalent cu zero; sub
actiunea acestui sistem de forte sistemul se afla in echilibru
mecanic.
![]() sistem de forte echivalent cu o forta;
aceasta forta unica va actiona in punctul O
sistem de forte echivalent cu o forta;
aceasta forta unica va actiona in punctul O
![]() sistem de forte echivalent cu un cuplu de forte
situat in planul (P)
sistem de forte echivalent cu un cuplu de forte
situat in planul (P)
![]() sistemul de forte va fi echivalent tot cu o
forta pentru ca momentul rezultant si rezultanta fiind
perpendiculare rezulta ca momentul minim este 0, ceea ce presupune
ca torsorul minim are doar componenta de forta; de data aceasta
rezultanta este un vector situat pe axa centrala a sistemului de
forte.
sistemul de forte va fi echivalent tot cu o
forta pentru ca momentul rezultant si rezultanta fiind
perpendiculare rezulta ca momentul minim este 0, ceea ce presupune
ca torsorul minim are doar componenta de forta; de data aceasta
rezultanta este un vector situat pe axa centrala a sistemului de
forte.
c) Axa centrala
Momentul minim fiind nul aplicam teorema lui Varignon din care rezulta ecuatia vectoriala a axei centrale:
|
|
|
Reprezentarile geometrice sunt cele din figura.
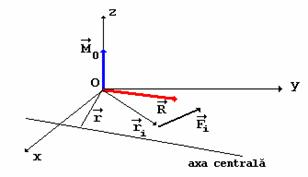
Fig. 21
5.3. Reducerea sistemelor de forte paralele (in spatiu)
a) Torsorul de reducere
Fie sistemul de forte anterior, paralel cu o
dreapta (D de versor ![]() . In rest vom face aceleasi notatii ca in figura
anterioara.
. In rest vom face aceleasi notatii ca in figura
anterioara.
Particularitatea fortelor in acest caz ne permite sa le scriem sub forma:
|
|
|
Atunci, pentru rezultanta sistemului se va obtine expresia analitica:
|
|
|
iar pentru momentul rezultant:
|
|
|
Asadar rezultanta este paralela cu fortele date, iar momentul rezultant este normal pe acestea, deci si pe rezultanta.
b) Cazurile de reducere
![]() sistemul de forte este echivalent cu zero; sub
actiunea acestui sistem de forte sistemul se afla in echilibru
mecanic.
sistemul de forte este echivalent cu zero; sub
actiunea acestui sistem de forte sistemul se afla in echilibru
mecanic.
![]() sistem de forte echivalent cu o forta;
aceasta forta unica va fi situata in punctul O
sistem de forte echivalent cu o forta;
aceasta forta unica va fi situata in punctul O
![]() sistem de forte echivalent cu un cuplu de forte de
moment
sistem de forte echivalent cu un cuplu de forte de
moment ![]()
![]() sistemul de forte va fi echivalent tot cu o
forta pentru ca si in acest caz momentul rezultant si
rezultanta fiind perpendiculare rezulta ca momentul minim este 0,
ceea ce presupune ca torsorul minim are doar componenta de
forta; de data aceasta rezultanta este un vector situat pe axa
centrala a sistemului de forte.
sistemul de forte va fi echivalent tot cu o
forta pentru ca si in acest caz momentul rezultant si
rezultanta fiind perpendiculare rezulta ca momentul minim este 0,
ceea ce presupune ca torsorul minim are doar componenta de
forta; de data aceasta rezultanta este un vector situat pe axa
centrala a sistemului de forte.
c) Axa centrala; centrul fortelor paralele
Momentul minim fiind nul putem aplica teorema lui
Varignon. Notand cu ![]() vectorul de
pozitie al unui punct oarecare al axei centrale, avem succesiv:
vectorul de
pozitie al unui punct oarecare al axei centrale, avem succesiv:
|
|
|
Ultima relatie este indeplinita daca
vectorul din paranteza este coliniar cu ![]() , adica daca avem:
, adica daca avem:
|
|
|
Am obtinut astfel ecuatia vectoriala a axei centrale sub forma:
|
|
|
unde am notat
|
|
|
Vectorul ![]() defineste un
punct C de pe axa centrala numit
centrul
fortelor paralele. Coordonatele acestui punct vor fi deci:
defineste un
punct C de pe axa centrala numit
centrul
fortelor paralele. Coordonatele acestui punct vor fi deci:
|
|
|
Acesta este un element intrinsec al sistemului de forte paralele; el nu depinde de sistemul de referinta. Intradevar, considerand un alt sistem de referinta cu originea intr-un punct O si notand cu C noua pozitie a centrului sistemului dat, avem:
|
|
|
ceea ce ne arata ca C si C coincid.
Centrul fortelor paralele nu depinde nici de
inclinarea fortelor (vectorul de pozitie nu depinde de ![]() ).
).
5.4. Reducerea sistemelor de forte continuu distribuite
a) Torsorul de reducere
Adesea intalnim cazul sistemelor de forte uniform
si continuu distribuite pe o curba (distributie liniara),
pe o suprafata (distributie superficiala) sau intr-un volum
(distributie volumica). Uzual se considera ca aceste tipuri
de sisteme de forte sunt cuminti din punct de vedere matematic, in
sensul ca pot fi modelate printr-o functie vectoriala de punct: ![]() . In acest caz, pe baza consideratiilor de calcul
diferential, modelul matematic al procesului de reducere a sistemului de
forte discret se transpune in acest caz continuu prin inlocuirea sumelor
cu integrale pe domeniile geometrice respective:
. In acest caz, pe baza consideratiilor de calcul
diferential, modelul matematic al procesului de reducere a sistemului de
forte discret se transpune in acest caz continuu prin inlocuirea sumelor
cu integrale pe domeniile geometrice respective:
|
|
|
Caz particular: forte paralele uniform distribuite
In acest caz ![]() va fi paralela in
orice punct cu vectorul
va fi paralela in
orice punct cu vectorul ![]() si atunci
momentul rezultant va fi perpendicular pe rezultanta. Centrul
fortelor paralele va avea expresia integrala corespunzatoare:
si atunci
momentul rezultant va fi perpendicular pe rezultanta. Centrul
fortelor paralele va avea expresia integrala corespunzatoare:
|
|
|
Rezultanta va fi paralela cu versorul directiei fortelor si va avea expresia analitica:
|
|
|
2.5. Contactul mecanic direct. Actiunea mecanica normala si tangentiala. Frecarea
Fie un sistem mecanic W ce exercita o interactiune mecanica asupra sistemului mecanic Q, considerat anterior. Vom distinge intre doua situatii:
a) Q si W se afla in contact indirect, mijlocit de un alt sistem
In acest caz se pune problema sistemului de transport T al interactiunii. Acesta poate fi material - caz in care dam peste situatia b), studiind contactul intre Q si W ca format din cele doua contacte directe (Q, T) si (T, W) - sau nematerial. In acest ultim subcaz, conform unei discutii anterioare, sistemul de transport se numeste camp de forte. Modelul sau matematic este relativ laborios si face obiectul unui capitolul special al fizicii, intitulat Teoria campului.
Multe din campurile de forte ce se manifesta in felia de univers in care traim (in universul macroscopic pe care il percepem) sunt cunoscute si modelate analitic: campul gravitational, campul electric, campul magnetic etc.
b) Q si W se afla in contact direct, nemijlocit
Vom trata acest caz in mod deosebit, datorita asa-numitelor interactiuni de frecare ce se manifesta in mod universal la contactul nemijlocit al corpurilor reale si despre care vom vorbi pe larg in paragraful dedicat fortelor de legatura.
Vom considera un caz semigeneral - util discutiei noastre legate de modelare matematica - in care contactul intre cele doua sisteme mecanice se realizeaza pe o suprafata S - cazul general in care avem un volum de contact fiind mult prea complicat pentru consideratiile din acest paragraf si fiind apanajul mecanicii mediilor deformabile. Mai mult, situatia reala, in care zona de contact are in general dimensiuni volumice neglijabile in raport cu cele ale celor doua sisteme mecanice, conduce la concluzia ca aproximatia facuta este foarte aproape de realitate in cele mai multe cazuri.
Experienta ne arata ca in fiecare punct al
suprafetei de contact se dezvolta forte de marimi,
directii si sensuri necunoscute ce modeleaza actiunea lui W asupra lui Q. Sa notam cu ![]() sistemul acestor
forte (numarabile sau uniform distribuite). Modelul matematic al
acestora presupune inlocuirea lor cu un torsor (minimal); in raport cu originea
reperului cartezian considerat O vom
avea:
sistemul acestor
forte (numarabile sau uniform distribuite). Modelul matematic al
acestora presupune inlocuirea lor cu un torsor (minimal); in raport cu originea
reperului cartezian considerat O vom
avea:
|
|
|
Cele doua componente ale torsorului poarta denumirea generica de actiuni (rezultanta actiunilor sau actiune, respectiv momentul actiunilor).
In general, in cazurile reale, suprafata de contact este relativ redusa in raport cu cea a sistemelor mecanice aflate in contact direct; ca urmare ea poate fi bine aproximata ca plana, generand astfel doua elemente geometrice distincte: directia normala si planul tangential de actiune.
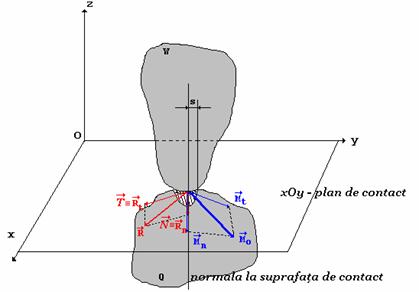
Fig. 22
Daca descompunem actiunea si momentul actiunii dupa cele doua elemente geometrice vom obtine:
|
|
|
![]() se numeste actiunea
normala sau, simplu, normala si
se numeste actiunea
normala sau, simplu, normala si ![]() actiunea
tangentiala sau forta de frecare
(coulombiana).
actiunea
tangentiala sau forta de frecare
(coulombiana).
Cu privire la interactiunile mecanice modelate de componentele acestui ultim sistem, experienta arata urmatoarele fapte deosebite:
componenta
![]() tinde sa
deplaseze corpul in planul de contact (este modelul matematic al acestei
componente a efectului mecanic al fortelor directe); aceasta
deplasare posibila se numeste alunecare. Ea nu se va produce decat
dupa o anumita limita a acestei componente,
tinde sa
deplaseze corpul in planul de contact (este modelul matematic al acestei
componente a efectului mecanic al fortelor directe); aceasta
deplasare posibila se numeste alunecare. Ea nu se va produce decat
dupa o anumita limita a acestei componente, ![]() , numita forta de frecare la alunecare. Pana
la aceasta valoare, componenta tangentiala a contactului direct
se numeste forta de frecare statica.
, numita forta de frecare la alunecare. Pana
la aceasta valoare, componenta tangentiala a contactului direct
se numeste forta de frecare statica.
componenta
![]() tinde sa
roteasca corpul in jurul unei axe din planul de contact (este modelul
matematic al acestei componente a efectului mecanic al fortelor directe);
aceasta miscare (posibila) se numeste rostogolire. Ea se va
produce efectiv numai de la o anumita limita a componentei
tangentiale a cuplului rezultant,
tinde sa
roteasca corpul in jurul unei axe din planul de contact (este modelul
matematic al acestei componente a efectului mecanic al fortelor directe);
aceasta miscare (posibila) se numeste rostogolire. Ea se va
produce efectiv numai de la o anumita limita a componentei
tangentiale a cuplului rezultant, ![]() numita cuplu
de frecare de rostogolire.
numita cuplu
de frecare de rostogolire.
componenta
![]() tinde sa
roteasca corpul in jurul normalei la planul de contact (este modelul
matematic al acestei componente a efectului mecanic al fortelor directe); aceasta
miscare (posibila) se numeste pivotare. De asemenea, se
va produce efectiv de la o anumita limita a componentei normale a
cuplului rezultant,
tinde sa
roteasca corpul in jurul normalei la planul de contact (este modelul
matematic al acestei componente a efectului mecanic al fortelor directe); aceasta
miscare (posibila) se numeste pivotare. De asemenea, se
va produce efectiv de la o anumita limita a componentei normale a
cuplului rezultant, ![]() numita cuplu
de frecare de pivotare.
numita cuplu
de frecare de pivotare.
Vom analiza pe rand cele 3 tipuri de miscari posibile (componente elementare ale efectului mecanic al fortelor directe) si, corespunzator, frecarile implicate de acestea.
2.5.1. Alunecarea. Frecarea la alunecare
Primele studii sistematice cu privire la frecarea de alunecare au fost facute de Ch. Coulomb (1736-1806). Concluziile sale actualizate sunt cunoscute drept legile frecarii (coulombiene). Continutul lor, cu consideratiile de pana acum, pot fi concentrate in urmatoarea relatie:
|
|
|
Discutii:
Forta maxima de frecare se realizeaza deci in momentul inceperii alunecarii. Teoretic ea nu se mai modifica ulterior, oricare ar fi deplasarea relativa a sistemelor in contact.
m se numeste coeficient de frecare la alunecare; el este adimensional si depinde, in principal, de natura corpurilor si de starea suprafetei de contact. Experienta arata insa ca aceasta dependenta simpla este valabila numai pana la anumite limite; peste acestea avem:
m scade cand viteza relativa a sistemelor mecanice creste peste anumite limite;
m depinde de presiunea exercitata de cele doua sisteme mecanice pe suprafata de contact (de valoarea reactiunii normale si de marimea suprafetei de contact) peste anumite limite.
Fenomenul de frecare este foarte complicat si face obiectul de studiu al unei ramuri distincte a mecanicii (Tribologia). O explicatie a sa este data de existenta neregularitatilor microscopice ale corpurilor aflate in contact, neregularitati ce se intrepatrund. Ca urmare, ne asteptam ca, pe masura ce netezim suprafetele corpurilor aflate in contact, frecarea la alunecare sa se reduca oricat de mult. Experienta arata ca aceasta concluzie este valabila si ea tot pana la anumite limite, pana la un anumit grad de netezire; peste acesta fortele de frecare cresc foarte rapid. Acest fapt se datoreaza aparitiei unui nou tip de frecare de alunecare, de tip electromagnetic: in jurul atingerii distantei medii de ordinul razei de actiune moleculara (10-10 m) intre cele doua corpuri apar forte de coeziune moleculara.
Tot experienta arata ca ar trebui sa consideram un coeficient de frecare statica (sau coeficient de aderenta), mo, care sa descrie frecarea fara alunecare; acesta este mai mare decat cel din cazul frecarii cu alunecare, m, numit si coeficient de frecare dinamica. Explicatia diferentei dintre acestea este tot de tip molecular (interventia unor forte de coeziune moleculara mai mari in cazul static).
Determinarea coeficientului de frecare la
alunecare se face experimental cu ajutorul tribometrului (planului inclinat);
se obtine in acest caz (vezi statica rigidului cu frecare) relatia ![]() care defineste
asa-numitul unghi de frecare:
care defineste
asa-numitul unghi de frecare:
|
|
|
Prin urmare, conditia necesara si suficienta ca doua sisteme mecanice aflate in contact direct sa nu alunece este ca forta de frecare la alunecare ce se dezvolta sa nu atinga valoarea maxima permisa de conditiile contactului (natura sistemelor, starea suprafetei de contact, presiunea exercitata pe aceasta etc.); analitic, aceasta conditie revine la inegalitatea anterioara.
2.5.2. Rostogolirea. Frecarea de rostogolire
Rezultatele experimentale cu privire la acest tip de deplasare conduc la rezultate similare celor din cazul alunecarii; conditia necesara si suficienta de mentinere a starii de repaus mecanic in ceea ce priveste componenta de rostogolire se scrie analitic:
|
|
|
Discutii:
s se numeste coeficient de frecare la rostogolire. El nu mai este adimensional ca µ, ci are dimensiune de distanta. Acest coeficient depinde, in principal de dimensiunea latimea suprafetei de contact pe directia tendintei de rostogolire.
Exista si in acest caz un moment maxim static, atunci cand nu se produce rostogolirea efectiva, care atinge maximul inaintea inceperii rostogolirii si unul dinamic, constant, ce se realizeaza in timpul rostogolirii si este mai mic decat maximul celui static (explicatia este similara cu cea de la alunecare).
Pivotarea. Frecarea de pivotare
Experienta ne ofera o conditie analitica similara celei de la rostogolire:
|
|
|
k se numeste coeficient de frecare la pivotare. In rest, discutiile sunt absolut similare celor de la rostogolire.
3. Modelarea matematica a interactiunii mecanice care genereaza fenomene mecanice indirecte (legaturi)
Rationamentul ce urmeaza prezinta un grad de abstractizare mai avansat, solicitand mai mult imaginatia celui ce va incerca sa desluseasca sensul notiunilor introduse. De aceea, toate rationamentele se vor face pe un exemplu concret, urmand ca ulterior, prin generalizare, sa fie obtinut modelul matematic pur al legaturilor.
Sa consideram pentru aceasta un sistem mecanic modelabil printr-un punct material situat intr-un tub circular.
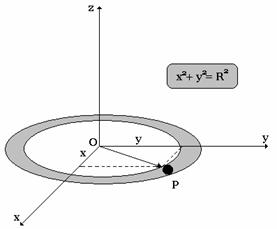
Fig. 23
Oricare ar fi deplasarea acestuia - sub influenta unor actiuni mecanice oarecare - coordonatele sistemului vor trebui sa satisfaca relatiile:
|
|
|
ce reprezinta ecuatiile cercului orizontal de raza R, cu centrul in originea sistemului de axe.
Conform deinitiei legaturii data in paragraful 5.2., rezulta ca avem de-a face cu un astfel de fenomen mecanic, modelat matematic prin chiar relatiile (170).
De remarcat faptul ca intre tub si punctul material, in lipsa oricarei actiuni directe, nu va exista nici o interactiune mecanica: punctul material nu se deplaseaza si nu interactioneaza in vre-un fel cu tubul (a se considera cazul imponderabilitatii!). De indata insa ce cel putin o interactiune mecanica directa va tinde sa deplaseze punctul material, va apare o interactiune corespunzatoare dintre acesta si tub, care va face ca deplasarea sa se faca in interiorul acestuia, astfel incat la orice moment ulterior sa fie satisfacute relatiile (170). Prin urmare, rezulta un fapt deosebit de important:
- interactiunea de legatura este nemanifesta in lipsa unei interactiuni directe; ea apare numai odata cu aceasta si depinde de ea.
Evident, interactiunea cu tubul, in prezenta fortelor exterioare, va deveni o interactiune mecanica obisnuita. Distinct este insa numai caracterul nemanifest al acesteia in lipsa altor interactiuni mecanice directe.
Ca urmare a acestor discutii, se poate considera urmatorul model matematic al interactiunilor ce genereaza fenomene mecanice de legatura (toate aceste aspecte, uneori incomplete, se intalnesc sub denumirea de axioma legaturilor):
- vector, numit forta de legatura, ce nu poate aparea singur, ci doar in prezenta a cel putin unei interactiuni exterioare.
Discutie:
In cele mai multe lucrari, aspectul distinct al fortelor de legatura subliniat in discutiile din acest paragraf este neglijat. Vom vedea la formalismele mecanicii ca acesta nu numai ca nu poate fi neglijat, dar este esential, ridicand probleme ce au facut necesare formalisme mecanice superioare celui newtonian.
La acest moment, conditia de nemanifestare a fortelor de legatura in lipsa fortelor directe nu poate fi modelata corespunzator. Conform unei definitii proprii, sunt necesare consideratii de ordin superior: deplasare virtuala, lucru mecanic virtual etc. In principiu, acestea ar putea fi facute si aici, insa nu aici ar fi locul lor firesc si, ca urmare, introducerea lor nefireasca le-ar face de neinteles.
|