Universitatea Tehnica "Gh. Asachi"
Facultatea de Electrotehnica
Specializarea : Tehnici avansate in curenti tari
PROIECT
Sisteme de reglare automata a viteziei masinii
asincrone cu orientare dupa flux rotoric
februarie 2006
Cuprins:
Cap.1 Principiul orientarii dupa campul electric al masinii.
Cap.2 Masina asincrona bifazata. Parametri si caracteristici.
Cap.3 Simularea pe calculator a principiului orientarii dupa campul rotoric
Cap.4 Schema bloc a sistemului complat de reglarea turatiei utilizand principiul orientarii dupa camplul rotoric
INTRODUCERE
Acest proiect este structurat pe patru capitole, in care am studiat masina asincrona bifazata, functionand in regim de motor, la anumiti parametri de calcul. Modelarea motorului asincron se face cu ajutorul programului Pspice, dupa cunoasterea schemei echivalente a mototrului. Studiul motorului asincron bifazat se face cu ajutorul a 2 scheme echivalente, cate una pentru fiecare axa artogonala, una pentru axa d si alta pentru axa q.
Capitolul 1
Principiul orientarii dupa camp al masinii asincrone
La motorul electric, indiferent de tipul tensiunii de alimentare sau de tipul constructiei, cuplul electromagnetic este rezultatul interactiunii fluxului magnetic de excitatie si curentul din indus. In cadrul motoarelor in costructie directa , (cum este si cel asupra caruia ne vom indrepta atentia in continuare), cuplul electromagnetic este dat de interactiunea fluxului magnetic de excitatie din infasurarea statorica sl curentul din infasurarea rotorica.
In principiu, dupa tipul tensiunii de alimentare, exista doua mari categorii de servomotoare: servomotoare de curent continuu si servomotoare de curent altemativ (asincrone si sincrone).
Expresia cuplului electromagnetic servomotoarele de c.c. este de forma:
![]() , unde k esta factor de proportionalitate, iar
, unde k esta factor de proportionalitate, iar
![]() respectiv
respectiv![]() sunt fluxul magnetic
de excitatie respectiv curentul din indus (din rotor).
sunt fluxul magnetic
de excitatie respectiv curentul din indus (din rotor).
Dintre toate tipurile de servomotoare existente, cale mai eficiente din punct de vedere at performantelor raman servomotoarele de curent continuu, insa ele nu sunt tocmai preferate din motive de fiabilitate. Performantele sunt insa bune si se obtin usor din punct de vedere practic exact din cauzele constructive care limiteaza fiabilitatea acestor motoare.
Astfel, datorita contactelor alunecatoare
se poate inteveni in circuitul rotoric si regla curentul ![]() , iar fluxul
, iar fluxul ![]() sa poata regla variind curentul de excitatie
statoric.
sa poata regla variind curentul de excitatie
statoric.
Expresia cuplului electromagnetic pentru motoarele asincrone este de forma:
![]() , unde p este numarul de poli ai masinii,
, unde p este numarul de poli ai masinii, ![]() este curentul rotoric,
iar
este curentul rotoric,
iar ![]() este fluxul de
magnetizare.
este fluxul de
magnetizare.
In cazul servomotoarelor asincrone,
exceptandu-se pe cele cu rotor bobinat, lucrurile se situeaza la polul opus:
datorita coliviei de veverita curentul rotoric nu poate fi controlat in mod conventional
din exterior (deci dispare posibilitatea reglarii lul ![]() ), si nu putem varia nici f1uxul de magnetizare
), si nu putem varia nici f1uxul de magnetizare ![]() in mod explicit cu ajutorul curentului din
infasurarea statorica (deoarece
in mod explicit cu ajutorul curentului din
infasurarea statorica (deoarece ![]() este rezultatul interactiunii intre campurile
magnetice produse de rotor si stator.
este rezultatul interactiunii intre campurile
magnetice produse de rotor si stator.
O metoda de calcul care sa indice legatura dintre curentul statoric si cele doua marimi care ne intereseaza sa porneste de la analogia intre masina asincrona si masina de curent continuu. La masina de curent continuu cu excitatie separata independenta marimilor care produc cuplul electromagnetic sa realizeaza artificial prin compensarea reactiei indusului cu ajutorul unei infasurari statorice. La masinile de curent alternativ nu mai este nevoie de interventie constructiva, ele fiind autocompensate in mod natural.
Independenta marimilor ce produc cuplul masinii de curent alternativ poate fi evidentiata prin metoda de reglare cu orientare dupa camp. In continuare, toate calculele si ipotezele inaintate se fac considerand o masina asincrona bifazata in regim de motor.
Analogia dintre masina de curent continuu si masina asincrona se porneste pentru inceput de la diagrama fazoriala a masinii asincrone cu rotor in scurtcircuit in anumite conditii simplificatoare. In cazut masinii cu flux de magnetizare constant, fazorul curentului rotoric este intotdeauna perpendicular pe fazorul fluxului de magnetizare. Dupa scrierea si explicitarea ecuatiilor de tensiuni rotorice si statorice la care se ataseaza relatiile fluxului si curentului de magnetizare se poate construi diagrama fazoriala simplificata a masinii asincrone cu rotor in scurtcircuit. Studiind comparativ masinile de c.c. si de c.a. din punct de vedere al dispunerii marimilor vectoriale flux si curent ce dau nastere cuplului se observa clar analogia intre cele aoua masini in regim de motor.
Din punct de vedere fenomenologic, la masina asincrona, curentul rotoric apare datorita inductiei magnetice produse de cimpul magnetic al infasurarii statorice de pe axa q strabatuta de curentul statoric. Curentul rotoric rezultat in urma acestui fenomen este egal ca valoare dar de semn contrar cu curentul statoric corespunzator infasurarii de pe axa q.
A doua componenta a curentui statoric
se noteaza cu ![]() si este curentul de magnetizare,
egal ca valoare cu curentul statoric corespunzator axei d. Aceasta este componenta reactiva a curentului statoric, careia ii
corespunde curentui din infasurarea de compensatie a masinii de curent
continuu. Analogia se poate face cel mal bine in cazul in care rotorul masinii
asincrone este blocat. In continuare se va face referire la modul de
constructie al unui sistem de reglare automata cu masina asincrona reglata dupa
camp. Pentru o mai buna intelegere, se
pot urmari figurile 7 si 8 (Capitolul 4).
si este curentul de magnetizare,
egal ca valoare cu curentul statoric corespunzator axei d. Aceasta este componenta reactiva a curentului statoric, careia ii
corespunde curentui din infasurarea de compensatie a masinii de curent
continuu. Analogia se poate face cel mal bine in cazul in care rotorul masinii
asincrone este blocat. In continuare se va face referire la modul de
constructie al unui sistem de reglare automata cu masina asincrona reglata dupa
camp. Pentru o mai buna intelegere, se
pot urmari figurile 7 si 8 (Capitolul 4).
La construirea unui sistem de reglare
automata in cadml caruia procesul este motorul asincron principiul reglarii
dupa
Traductoarele de
Sistemele de reglare automata cu
orientare dupa
In cadrul motoarelor asincrone cu rotor bobinat exista doua variante constructive de scheme de reglare automata in functie de marimile masurate. Prima schema se bazeaza pe masurarea directa a campului magnetic din intrefier cu ajutorul traductoarelor precum si pe masurarea curentului statoric in a doua schema campul e deteminat indirect, prin calcul, dupa masurarea curentilor si tensiunilor statorice precum si a vitezei rotorui. A treia schema se refera la motoarele asincrone cu rotor bobinat, in cadrul careia campul este determinat prin masurarea curentilor statorici, rotorici si a vitezei de rotatie a rotorului. Aceasta ultima schema nu se incadreaza in sfera noastra de interes datorita faptului ca motorul asincron este un rotor bobinat, nu cu rotor in scurtcircuit.
La prima metoda, marimile masurate sunt chiar cele de reglaj, astfel ca schema este mai putin sensibila la erorile datorate veriatiei parametrilor constructivi ai masinii. La a daua metoda insa, schema de reglare este puternic influentata de variatia rezistentei rotorice si a saturatiei intrefierului, dar nu mai prezinta problemele legate de masurarea corecta a fluxului cu traductoare. A treia schema prezinta avantajele ambelor scheme, insa nu poate fi folosita la moatoarele cu rotor in scurtcircuit.
Reglarea bazata pe principiul orientarii
dupa
Cele mai des folosite scheme sunt cele care realizeaza orientarea dupa fluxul rotoric, deoarece marimile de reglare rezulta mai simplu. In acest caz, fluxul din intrefier masurat direct cu traductoarele se confunda cu fluxul rotoric; de aeeea, traductoarele se plaseaza in intrefierul motorului in timpul asamblarii acestuia. Masurarea fluxului magnetic cu ajutorul traductoarelor prin fenomenul inductiei se face greu si la frecvente foarte joase, fiind practic imposibila frecventa zero. Acest dezavantaj se poate elimina prin utilizarea unor elemente integratoare analogice care prelucreaza valorile masurate ale fazoriior spatiali tensiune si curent statoric.
Schemele cu orientare dupe fluxul statoric necesita calcule mal laborioase pantru marimile de camanda si reglare, care daca nu sunt efectuate destul de rapid nu duc la o functionare judicioasa a sistemului de reglare automata.
Capitolul 2
Studiul masinii asincrone bifazate
Sa presupunem o masina asincrona bifazata functionand in regim de motor, cu urmatorii parametri:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
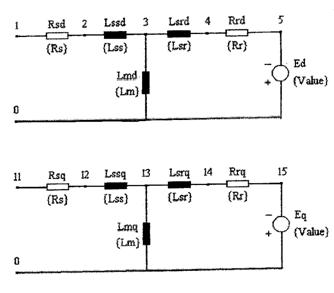
Pentru a putea realiza modelarea motorului asincron folosind programu1 PSpice este necesar sa cunoastem schema echiventa a motorului in cauza. Deoarece studiem un motor asincon bifazat vom avea o schema echivalenta formata din doua scheme similare, cite una pentru fiecare axa ortogonala (una pentru axa d si una pentru axa q). Convenim de aici incolo sa notam cu indici de tipul 1, 2, ..., n marimile ce caracterizeaza scheme corespunzatoare axei d, iar cu indici de tipul 11, 12,....,1n in marimile ce caracterizeaza scherma corespunzatoare axei q.
Dispunand de aceste date nominale, de schema electrica echivalenta si cu ajutorul programului de simulare (prezetat chiar la sfarsitul Capitolului 3) vom studia in PSpice comportarea motorului asincron bifazat si vom incerca sa obtinam o serie de parametri care ne intereseaza.
1)Pentru inceput, vom calcula cuplul nominal al masinii si viteza ungiulara la care acesta se obtine.
Putem exprima puterea nominala a masinii in functie de cuplul si viteza unghiulara a acesteia:
![]()
Stim ca viteza unghiulara de sincronism a masinii (a rortorului) este data de relatia:
![]()
Inlocuind in relatia precedenta, obtinem : 
Folosind programul PSpice vom simula funtionarea masinii, introducand puterea nominala si cuplul corespunzator turatiei de sincronism, vom obtine in urma simularii, valoarea reala a vitezei unghiulare a masinii asincrone. (Evident, aceasta valoare trebuie sa rezulte mai mica decat cea corespunzatoare turntiei de sincronism).
In urrma primei simulari, se obtine: ![]() si un cuplu
corespunzator :
si un cuplu
corespunzator : ![]()
In urrma celei de-a doua simulari, se obtine: 
![]()
In urrma celei de-a treia simulari, se obtine : ![]()
![]()
In urma continuarii simularilor pentru valori descrescatoare ale lu
![]() se observa o scadere a
cuplului electromagnetic. Deci, cuplul nominal este:
se observa o scadere a
cuplului electromagnetic. Deci, cuplul nominal este:
![]() , iar
, iar ![]()
2)Curentii prin infasurarea statorica, 151o144b rotorica, respectiv curentul corespunzator inductantei de magnetizare au valorile
![]()
![]()
![]()
![]()
Fluxul rotoric dupa axa d are valoarea de 1.05 Wb, iar tensiunea
la bornele inductantei de magnetizare este de 333.346 V, apoi de 310.1 V. Dafazajul intre fluxul magnetic rotoric ![]() si curentul statoric
si curentul statoric ![]() se poate calcula
folosind rezultatele obtinute in urma simularii
se poate calcula
folosind rezultatele obtinute in urma simularii ![]()
![]()
Ne intereseaza insa determinarea defazajului intre tensiunea si curentul statoric, in scopul determinarii factorului de putere al motorului asincron. Evident, factorul de putere rezultat in urma simularii si a calculelor va avea o valoare mai mare decat cea a motorului real, din cauza idealizarii masinii in cadrul simularii.
Din simulare rezulta: ![]()
![]()
![]()
![]()
Calculam valoarea defazajului: ![]() ......
......![]()
![]() ........
........ ![]()
=> ![]() =
=![]()
Deci, factorul de putere este : cos![]() =0.87
=0.87
3)Functionarea in gol
Viteza unghiulara in gol, cuplul
rezistent la arborele motorului este nul, deci ![]()
Viteza unghiulara corespunzatoare
este ![]() , curentii prin infasurarea statorica, 151o144b rotorica, respectiv
curentii corespunzatori inductantei de magnetizare au valorile
, curentii prin infasurarea statorica, 151o144b rotorica, respectiv
curentii corespunzatori inductantei de magnetizare au valorile ![]()
![]()
![]() , iar tensiunilei la
bornele inductantei de magnetizare sunt
, iar tensiunilei la
bornele inductantei de magnetizare sunt
![]()
![]()
Procedand analog, vom determina defazajul intre tensiunea si curentul statoric, in scopul determinarii factorului de putere.
Se obtine :
![]()
![]() iar factorului de
putere a1 motorului asincron functionand la gol rezulta: cos
iar factorului de
putere a1 motorului asincron functionand la gol rezulta: cos![]() =0.06 .
=0.06 .
In urma unor simulari succesive
pentru valori crescatoare ale vitezei unghiulare ![]() se obtin o serie de
caracteristici M(
se obtin o serie de
caracteristici M(![]() ). Intrucat exista oscilatii de cuplu, se extrage valoarea
maxima si valoarea minima a cuplului electromagnetic, dupa care se calculeaza
valoarea medie a cuplului efectuand media aritmetica a celor doua valori
citite.
). Intrucat exista oscilatii de cuplu, se extrage valoarea
maxima si valoarea minima a cuplului electromagnetic, dupa care se calculeaza
valoarea medie a cuplului efectuand media aritmetica a celor doua valori
citite.
![]()
![]()
![]()
18.993 18.972 ![]()
![]() 18.993 ( pt.
18.993 ( pt. ![]() )
)
20.451 20.449 ![]()
![]() 20.450 ( pt.
20.450 ( pt. ![]() )
)
22.125 22.125 ![]()
![]() 22.125 ( pt.
22.125 ( pt. ![]() )
)
24.035 24.035 ![]()
![]() 24.035 ( pt.
24.035 ( pt. ![]() )
)
28.583 28.583 ![]()
![]() 28.583 ( pt.
28.583 ( pt. ![]() )
)
Se observa ca incepand de la valori mai mari de 60 rad/s ale vitezei unghiulare, cuplurile electromagnetice maxim si minim devin egale ca valoare si totodata crescatoare.
Cuplul maxim sa obtine pentru ![]() = 120ad/s.
= 120ad/s.
Capitolul 3
Simularea pe calculator a principiului orientarii
dupa cimpul rotoric
Dupa cum s-a explicat mai pe larg in Cap. 1, masina asincrona in regim de motor (servomotor) poste fi comandata doar plin intermediul curentului statoric.
Curentul statoric ![]() are doua componente:
curentul reactiv
are doua componente:
curentul reactiv ![]() care contribuie la magnetizarea masinii si curentul activ care creaza cuplul electromagnetic.
care contribuie la magnetizarea masinii si curentul activ care creaza cuplul electromagnetic.
In cadrul schemei bloc a sistemului complet de reglare a turatei, partea cea mai importanta o ocupa schema bloc a orientarii dupa campul rotoric, prezentata in Fig. 1.
Fig. 1. Schema bloc a orientarii dupa campul rotoric
Schema bloc ce ilustreaza principiul
orientarii dupa campul rotoric are ca marimi de intrare intr-o prima faza cei
doi curenti ![]() si
si ![]() precum si doua valori
numerice sinusului respectiv cosinusului unghiului
precum si doua valori
numerice sinusului respectiv cosinusului unghiului![]() dintre axa d a masinii si directia fluxului magnetic
rotoric
dintre axa d a masinii si directia fluxului magnetic
rotoric ![]() respectiv
respectiv ![]() .Aceste patru marimi de interes sunt marimile de intrare in
blocul notat
.Aceste patru marimi de interes sunt marimile de intrare in
blocul notat ![]() . In cadrul acestui bloc si a inca unuia sunt efectuate o
serie de operatii relativ simple in urma caroro va rezulta valoarea curentului
statoric. Mai exact, curentul statoric sa obtine sub forma a doua valori
numerice "ideale" notate cu
. In cadrul acestui bloc si a inca unuia sunt efectuate o
serie de operatii relativ simple in urma caroro va rezulta valoarea curentului
statoric. Mai exact, curentul statoric sa obtine sub forma a doua valori
numerice "ideale" notate cu ![]() si
si ![]() .
.
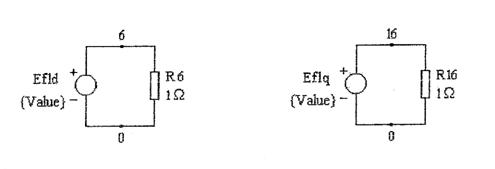
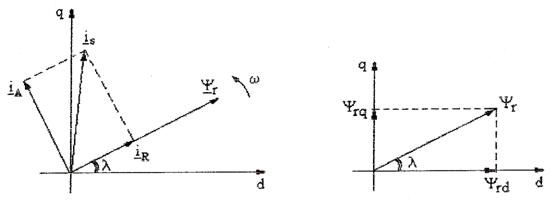 Fig. 2 Fig. 3
Fig. 2 Fig. 3
Unghiul este evaluat cu ajutorul
informatiei continute de valorile fluxuriior ![]() si
si ![]() , aceste valori fiind masurate prin intermediul unor;
tnaductoare (elementele innegrite din intrefierul masinii asincrone - Fig. 1).
Pentru inceput se calculeaza fluxul rezultant, iar apoi pot fi imediat
calculate valorile pentru sinus si cosinus:
, aceste valori fiind masurate prin intermediul unor;
tnaductoare (elementele innegrite din intrefierul masinii asincrone - Fig. 1).
Pentru inceput se calculeaza fluxul rezultant, iar apoi pot fi imediat
calculate valorile pentru sinus si cosinus:
![]()
![]()



In cadrul blocului D(-![]() ), folosind toate marimile de intrare amintite anterior, se
elaboreaza valorile curentiior
), folosind toate marimile de intrare amintite anterior, se
elaboreaza valorile curentiior ![]() si
si ![]() . In practica, toate
operatiile de calcul necesare sunt efectuate cu ajutorul unui circuit
electronic specializat (microprocesor dedicat sau microcontroler), deoarece
calculele trebuie efectuate in timp real. Asadar este imperios necesar ca
unitatea de calcul (care fizic este integrata in structura servomotorului
asincron) sa functioneze in tandem cu servomotorul, deci sa aiba o putere de
calcul suficient de mare, dar in acelasi timp sa aiba si un pret rezonabil.
. In practica, toate
operatiile de calcul necesare sunt efectuate cu ajutorul unui circuit
electronic specializat (microprocesor dedicat sau microcontroler), deoarece
calculele trebuie efectuate in timp real. Asadar este imperios necesar ca
unitatea de calcul (care fizic este integrata in structura servomotorului
asincron) sa functioneze in tandem cu servomotorul, deci sa aiba o putere de
calcul suficient de mare, dar in acelasi timp sa aiba si un pret rezonabil.
Cele doua valori numerice "dorite" ale curentilor sunt marimi de intrare pentru un bloc (nenotat pe schema pnncipala) care este de fapt o sursa de curent Ea peate fi un convertor static de frecventa alimentat cu tensiune trifazata sau, ca in cazul de fata, un circuit mult mai simplu alimentat cu tensiune continua (Fig. 5). In Fig. 4 se prezinta schema bloc a sursei de curent utilizata in cadrul simularii pe calculator.
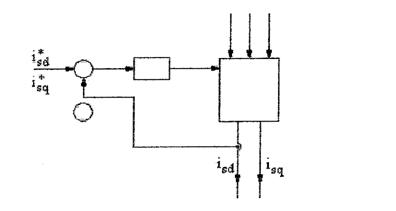
Fig. 4
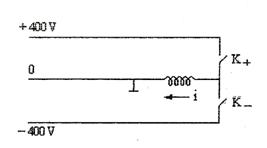
Fig. 5
Este evident faptul ca tipul de sursa
de curent propus in Fig. 5 este mai simplu de realizat din punct de vedere
practic (in plus nu necesita retea trifazata de tensiune) si mai ieftin ca
pret. Tot evident este insa si faptul ca aceasta sursa nu poate realiza curentul
de forma sinusoidala pe care il necesita motorul asincron. Modul de functioare
al sursei relzulta in operarea corespunzatoare (inchideri si deschideri
succesive) ale calor doua intrerupatoare ![]() si
si ![]() . In urma acestor succesiuni, se obtine o forma de unda care
sa apropie intr-o oarecare masura de o sinusoida.
. In urma acestor succesiuni, se obtine o forma de unda care
sa apropie intr-o oarecare masura de o sinusoida.
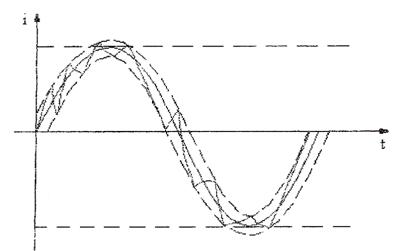
Totusi, in practica, aceasta caracteristica a curentului nu deranjeaza deoarece din cauza inertiei rotorul nu poate urmari micile "abateri" ale curentului de la forma sinusoidala. Este clar totodata ca daca intrerupatoarele sunt comandate mai riguros, cu atat si abarerile de la sinusoida se vor incadra intre limite mai reduse. In Fig. 6 avem caracteristica i(t) pentru o asemenea sursa de curent. Cu rosu - forma de unda a curentului care se obtine, iar cu albastru forma sinusoidala ideala.
Curentul ![]() si
si ![]() obtinut cu ajutorul
sursei de curent sunt aplicate celor doua infasurari aflate pe statorul
motorului asincron. Odata alimenta, in stator apare ftuxul magnetic
obtinut cu ajutorul
sursei de curent sunt aplicate celor doua infasurari aflate pe statorul
motorului asincron. Odata alimenta, in stator apare ftuxul magnetic ![]() care induce in colivia
rotorica curentul
care induce in colivia
rotorica curentul ![]() ; din interactiunea
celor doua componente (mereu perpendiculare una fata de cealalta) la nastere cuplul
electromagnetic care pune in miscare rotorul motorului. Componentele
; din interactiunea
celor doua componente (mereu perpendiculare una fata de cealalta) la nastere cuplul
electromagnetic care pune in miscare rotorul motorului. Componentele![]() si
si ![]() ale fluxului de magnetizare
ale fluxului de magnetizare ![]() , corespunzatoare celor doua axe ale masinii, sunt detectate
si masurate de cele doua traductoare. Aceste doua componente (
, corespunzatoare celor doua axe ale masinii, sunt detectate
si masurate de cele doua traductoare. Aceste doua componente (![]() si
si ![]() ) sunt folosite nu
doar pentru calculul valorilor
) sunt folosite nu
doar pentru calculul valorilor ![]() si
si ![]() , ci si pentru estimarea fluxului de magnetizare
, ci si pentru estimarea fluxului de magnetizare ![]() . Valoarea acestui flux se aduce ca o componenta de reactie
negativa si impreuna cu valoarea "dorita"
. Valoarea acestui flux se aduce ca o componenta de reactie
negativa si impreuna cu valoarea "dorita" ![]() se introduce intr-un regulator. Acest regulator are ca marime
de iesire curentul
se introduce intr-un regulator. Acest regulator are ca marime
de iesire curentul ![]() (care e marimea de
intrare pentru blocul D(-
(care e marimea de
intrare pentru blocul D(-![]() ), dar acest lucru se va vedea doar in Cap. 4 in cadrul
schemei bloc complete.
), dar acest lucru se va vedea doar in Cap. 4 in cadrul
schemei bloc complete.
Cu
ajutorul sistemului descris de schema bloc de mai sus, exista in sfarsit
posibilitatea de a controla riguros cuplul electromagnetic si turatia (viteza
unghiulara) a rotorului motorului asincron. Se mai impune o observatie:
curentul ![]() asigura magnetizarea
masinii, iar in cazul general nu este necesar ca el sa varieze, ci doar sa
asigure o magnetizare corespunzatoare regimului nominal. Asadar, trebuie variat
doar curentl activ
asigura magnetizarea
masinii, iar in cazul general nu este necesar ca el sa varieze, ci doar sa
asigure o magnetizare corespunzatoare regimului nominal. Asadar, trebuie variat
doar curentl activ ![]() .
.
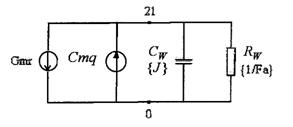
In cadrul programuiui de simulare realizat in PSpice, calculul fluxului electromagnetic si a marimilor mecanice nu poate fi facut automat, si de aceea se recurge la crearea unor circuite electrice elementare auxiliare cu surse de tensiune comandate (si/sau surse de curent) care sa ofere drept rezultat marimile amintite mai sus.
[D(![]() )]=
)]= 
![]()
![]()
![]()
![]()
![]()
![]()
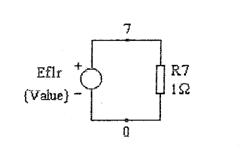
Eflr 7 0 Value =
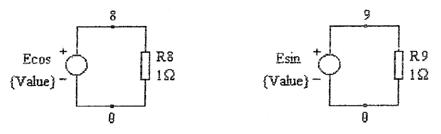
Ecos 8 0 Value =
Ecos 9 0 Value =
La finalul acestui capitol, dupa prezentarea schemei circuitului echivalent (in Capitolul 2), a modului de calcul a marimilor care ne intereseaza (ilustrat mai sus) si a rezultatelor obtinute in urma simularii (tot in Capitolul 2), vom prezenta programul camplet realizat in PSpice cu ajutorul caruia s-au obtinut rezultatele:
modelul ortogonal al mat
.param Rs=5.5
.param Lss=29.9m
.param Lm=0.41m
.param Lsr=28.2m
.param Rr=4.7
.param J=50m
.param Fa=5.4m
.param W=0
* parametrii axei d *
Rsd 1 2
Lssd 2 3 IC = 0
Lmd 3 0 IC = 0
Rrd 5 4
Lsrd 4 3 IC = 0
Ed 0 5 value =
* parametrii axei q *
Rsq 11 12
Lssq 12 13 IC = 0
Lmq 13 0 IC = 0
Rrq 15 14
Lsrq 14 13 IC = 0
Eq 15 0 value =
* marimi mecanice *
Gme 0 21 value =
Gmr 21 0 0
Cj 21 0 0 IC =0
Ra 21 0 0
* surse de alimentare in tensiune *
Erd 1 0 value =
Esd 11 0 value =
* calcul flux *
Eflrd 6 0 value =
Eflrq 16 0 value=
*Analiza axe flux *
Esin 31 0 value =
Ecos 32 0 value =
Vp 33 0 pml (0 1 1m 0 )
R31 31 0 1
R32 32 0 1
R33 33 0 1
*Comparator cu histerezis *
Ged 0 41 value =
Geq 0 42 value =
R41 41 0
R42 42 0
C41 41 0
C42 42 0
Esgrd 43 0 value =
Esgnq 44 0 value =
R43 43 0
R44 44 0
C43 43 0
C44 44 0
Gisdi 0 51 value =
Gisdi 0 52 value =
R 51 51 0 1
R 52 52 0 1
* rotire axe alimentare *
Gind 0 1 value =
Ginq 0 11 value =
VIR 61 0 2,17
VIA 62 0 PVVL (0 0 0,1 0 0 11 10 )
R 34 34 0 1
R35 35 0 1
.PROBE
.Tran 0,1 0,5 0 0,1 m VIC
.END
Capitolul 4
Schema bloc a sistemului complet de reglare a turatiei
utilizand principiul orientarii dupa campul rotoric
Dupa cum s-a indicat inca de la primul capitol, scopul acestui studiu a fost realizarea unui dispozitiv prin care sa se controleze cu mare precizie turatia si cuplul unui motor asincron bifazat, reusind transformarea acestuia intr-un servomotor asincron. Ca in cazul majoritatii sistemelor sau proceselor cu aplicatii practice, este nevoie ca procesul in cauza (in cazul de fata motorul asincron) sa fie controlat prin intermediul unui sistem de reglare automata. Schema de principiu a unui sistem de reglare automata se prezinta sub forma celei din Fig. 7, cu o singura bucla de reactie neagativa (si cu x respectiv y marimea de intrare respectiv de iesire).
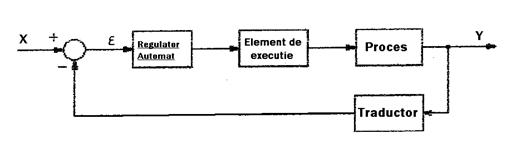
Schema bloc a sistemului complet de reglare a turatiei (Fig. 8) este construita tot pe principiul ilustat mai sus, dar este ceva mai complexa. In cadrul schemei complete sa regaseste schema bloc a orientarii dupa campul rotoric, prezentata in Capitolul 3 in Fig. 1. Schema bloc completa o include pe aceasta dar mai contine inca cateva elemente noi in comparatie cu schema de principiu din Fig. 7.
Inprimul rand, exista doua circuite
de reactie negativa (si in consecinta doua regulatoare), precum si trei
traductoare; dintre acestea, doua traductoare sunt de acelasi tip (traductoare
de camp), dar al treilea este traductor de turatie care furnizeaza informatii
cu pivire la viteza unghiulara ![]() a rotorului motorului
asincron. Exista de asemenea doua marimi (principale) de intrare, viteza
unghiulara "dorita"
a rotorului motorului
asincron. Exista de asemenea doua marimi (principale) de intrare, viteza
unghiulara "dorita" ![]() si fluxul magnetic
"dorit"
si fluxul magnetic
"dorit" ![]() , ambele impuse (prescrise) de catre utilizator.
, ambele impuse (prescrise) de catre utilizator.
Traductorul de turatie este un tahogenerator cuplat mecanic la axul motorului asincron.
Aceasta schema transforma motorul asincron bifazat obisnuit intr-un servomotor. Dupa alimentarea cu tensiune electrica si introducerea marimilor de utlizare sistemul este gata de utilizare ,oferind performantele specifice unui servomotor si fiabilitatea unui motor asincron, ambele la un pret rezonabil.
|
