Scopul acestei lucrari este de a dezvolta o aplicatie orientata pe o imagine de asamblu asupra structurilor si materialele inteligente. Inteligenta descrie adaptivitatea proprie, intelegerea proprie, memoria si multi-functionalitatea materialelor sau structurilor. Aceste caracteristice furnizeaza numeroase aplicatii posibile pentru aceste materiale si structuri in mediul industrial, sisteme de infrastructura civila si biomecanisme. Exemple de aplicatii specifice sunt micro-positionarea, izolarea vibratiei, valva cu actionare rapida si guri de furtun, traductoare, amortizoare pentru masini de lux si montura pentru motoarele active la avioane. Vibratia activa si controlul transmisiei acustice, controlul formei active sunt cateva din acele aplicatii atractive pentru materialele si structurile inteligente. Integrarea sistemului, reducerea consumului de energie si masa, eliminarea partilor de miscare din sistemul de actionare, expresia dintre sistemul de actionare si sistemul senzorial sunt cateva din be 848f55i neficiile ale utilizarii materialelor inteligente.
Cateva din definitiile si descrieri de baza sunt insotite de o colectie de aplicatii curente sau propuse, modelarea curenta, fabricrarea si rezultatele practice ale acestor materiale si structuri. Materiale inteligente acoperite in aceasta imagine de asamblu: aliaje cu memoria formei sau fluidele electroreologice precum si materialele piezoelectrice utilizate in constructia motoarelor ultrasonice. Aplicatiile curente sunt in special in domeniile senzoriale si de actionare, controlul vibratiei pasive si active si controlul daunei active.
Domeniul materialelor si structurii inteligetente se dezvolta cu inovatiile tehnologice care apar in materialele ingineresti, sistemele senzoriale, sistemele de actionare, procesarea imaginilor si mecanismele de integrare. Materialele inteligentele sunt definite pe diferite cai:
materiale cu functionare ca ambele sisteme senzorial si de actionare
materiale care au raspunsuri multiple la un stimul intr-o forma coordonata
materialele inteligente pasive cu reparatie proprie sau caracteristice de stand-by pentru a rezista la schimbari neprevazute
materiale inteligente active utilizand reactia inversa
materiale inteligente si sisteme care reproduc functiile biologice in sistemele structurale de incarcare a pozitiei.
O analogie detaliata intre sistemele structurale inteligente si sistemele
biologice a fost elaborata dupa cum urmeaza: " Scopul tehnologiei structurilor inteligente este de a reproduce functii biologice in sistemele structurale de incaracare a pozitiei. Aceste functii biologice ar trebui sa includa un sistem schelet care sa furnizeze capabilitatea de incarcare a pozitiei, un sistem nervos care este o retea de senzori incrustati sau atasati pentru a monitoriza starea structurii, un sistem motor pentru a furniza raspunsul adaptiv, un sistem imun pentru a furniza capabilitatea de vindecare si un sistem neural pentru a furniza functiile de invatarea si luare de decizii."
De asemenea, caracteristicile necesare pentru sistemele senzoriale si de actionare au fost exprimate dupa cum urmeaza:" Materialele senzoriale ar trebui sa aibe abilitatea de a intoarce stimuli ca semnale termice, electrice si magnetice, la sistemul motor in raspuns la schimbarile in caracteristice termomecanice ale structurilor inteligente. Pe cand, materialele de actionare ar trebui sa aibe abilitatea de a schimba forma, rigiditatea, pozitia, frecventa natural, umiditatea si/sau alte caracteristi mecanice ale structurilor inteligente. Cele mai populare sisteme materiale utilizate pentru sistemele senzoriale si de actionare sunt materialele piezoelectrice, materialele magnetostrictive, aliaje cu memorarea formei, fluidele electroreologice si fibrele optice. Materialele magnetrostrictive, aliajele cu memorarea formei si fluidele electroreologice sunt utilizate ca materiale de actionare. In timp ce, fibrele optice sunt utilizate in special ca materiale senzoriale. Dintre toate aceste materiale active, materialele piezoelectrice sunt utilizate in mare masura, datorita raspunsului lor electromecanic rapid, necesitatilor scazute de putere si fortelor generative ridicate.
Materialele inteligente au devenit un domeniu spre care s-au concentrat atentiile pentru activitatile de cercetare si dezvoltare viitoare in aplicatiile structurale, datorita avantajelor distincte pe care aceste materiale le ofera, atunci cand acestea sunt comparate cu cele clasice. Importanta controlului activ a acestei regiuni ar putea reprezeta o imbunatatire semnificanta pentru sistemele de materiale compuse.
Sistemele biologice pot furniza indrumarea pentru dezvoltarea structurilor ingineresti inteligente. Se discuta potentialele beneficii pentru a avansa materialele artificiale prin intermediul inspiratiei obtinuta din intelegerea functiei materialelor naturale. Materialele multifunctionale sunt bine definite ca si materiale care manifesta raspunsuri multiple ( de ex, variatiile mecanice si electrice combinate) cand sunt supuse la un singur stimul (de ex, termic) sau manifesta un singur raspuns cand sunt supuse la stimuli multiplii toate intr-un mod coordonat. Investigarile analitice si experimentale au fost rezumate intr-o capabilitate de fabricatie si control a structurilor inteligente cu sisteme senzoriale si de actionarei unificate. A fost propusa idea de utilizare a materialelor inteligente in aplicatiile de control adaptiv. O data cu dezvoltarea materialelor inteligente, vibratii parametrice on line ar putea fi obtinute fizic.
Materialele inteligente compuse si structurile adaptive cu capabilitati senzoriale/de activare, combina proprietatile mecanice superioare ale materialelor compuse, precum si, incorporeaza capabilitatea aditionala pentru a intelege si adapta raspunsul lor static si vibro-acustic. Ca si materialele/structurile, apare promisiune de rezolvare a problemelor curente de limitare in sistemele de propulsire avansate.
A fost propusa idea utilizarii materialelor inteligente in aplicatiile de control adaptiv. In suprimarea vibratiei structurale prin actiunile de control parametrice, parametrii structurali sunt variati on line in raport cu semnalele reactiei inverse si comenzile de control. Aceste structuri semiactive ( de asemenea cunoscute ca pasive adaptive) au avantajele ambelor sisteme pasive si active. Ele se pot adapta la variatiile sistemului prin intermediul actiunilor de pe reactia inversa, si sunt astfel mult mai efective decat structurile pasive. Pe de alta parte, ele necesita normal putere scazuta, sunt putin sensibile la depasire, si mult mai stabile decat structurile sub actiunile deplin active. O data cu dezvoltarea materialelor inteligente, variatiile parametrice on line pot fi obtinute fizic. A fost deja executat un studiu inteligibil pe controlul in timp real ale acestei clase de structuri adaptive. Cat timp conceptul de control a vibratiei structural utilizand circute piezoelectrice semi-active este in perspectiva, sunt necesare mai multe cercetari pentru a realiza aceasta idee. Trebuie dezvoltate metodologii noi pentru pripeperea caracteristicilor unice ale acestor structuri. Rezultatele majore de control sunt neliniaritatilor sistemului, datorita parametrilor dependenti de stare constrangerilor sistemului de actionare (de ex, inductanta si rezistenta pozitive), balantei dintre suprimarea vibratiei principale ale structurii contra stabilizarii dinamicilor subsistemului (circiut electric).
Rheologia reprezinta studiul chestiunilor de deformare si curgere si astfel notiunea de "Electrorheologic" indica o deformatie indusa electric sau o schimbare in conditiile de curgere.
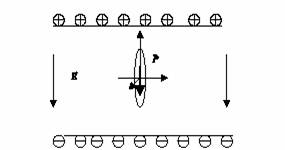
Materialele electrorheologice sunt suspensii care experimenteaza schimbari reversibile ale proprietatilor rheologice cum ar fi vascozitatea, plasticitatea si elasticitatea atunci cand acestea sunt suspuse influentei campurilor electrice. Aceste schimbari reversibile se datoreaza interactiunii controlabile dintre particulele dielectrice de ordinul micronilor din interiorul suspensiilor electrorheologice. Polarizarea acestor particule conduce la schimbari ale configuratiei. In esenta comportamentul materialelor electrorheologice se transforma din acela de lichid in caracteristicile unui solid de tip gel, cand este aplicat un camp electric.
Cercetatorii ca Duff 1896, Quinke 1897 au inceput studiere raspunsului electrorheologic inca de la inceputul secolului al 19 lea cu mult inainte ca cercetarea studiul fenomenelor electrorheologice sa castige o atentie deosebita ,fapt ce s-a intamplat odata cu realizarea studiilor cercetatorului Wilnslow.
Willlis M. Winslow a explicat pentru prima data in 1940 acest efect utilizand dispersia in ulei a unor pudre fine. Acesta a introdus conceptul controlarii vascozitatii unui fluid electro-vascos prin utilizarea unui camp electric. Rezistenta de curgere a acestor fluide crestea proportional cu intensitatea campului la expunerea la campuri electrice AC de ordinul de marime 4kV/mm. Fluidele erau obtinute din suspensii ale unui fluid de baza izolator si din particule de ordinul 1/10 pana la 1/100 microni dimensiune.
Winslow a observat o structura "fibroasa" compusa din lanturi de particule aliniate cu campul electric aplicat. Efectul electrorheologic, numit si efectul Winslow, este gandit sa se atinga din diferenta in constantele dielectrice ale fluidului si particule. In prezenta campului electric, particulele, datorita unui moment dipol indus, vor forma lanturi de-a lungul liniilor de camp. Aceasta structura indusa shimba viscozitatea, yield stress, si alte proprietati ale ERF-urilor, permitand ERF-ului sa-si schimbe consitenta de la cea ce lichid la ceva ce este vascoelastic, de consistenta unui gel, cu timpi de raspuns la schimbari ale campurilor electrice de ordinul milisecundelor.
Altfel spus, un fluid ER se constituie din particule fine polarizabile suspendate intr-un fluid a carui constanta dielectrica este joasa. Tipic dezvoltarea cercetarii primelor fluide electrorheologice a decurs incet, in primul rand deoarece acestea contineau o anumita cantitate de apa, si nu puteau functiona la temperaturi inalte.
Cu toate ca fenomenul electrorheologic investigat prima data de Winslow a prezentat un foarte mare interes, numai cateva produse comerciale sau dizpozitive exista astazi.
Aplicatiile comerciale nu s-au dezvoltat imediat din cauza unor factori ca: limitari ale temperaturii de operare, problemelor de stabilitate a memorarii, si insuficientei tehnologiei in control a efectului electrorheologic. Multe din aceste probleme de inceput si-au gasit solutionarea. De exemplu, sunt disponbile microprocesoare extrem de mici pentru a face ca tehnologia de control si senzoriala on-board sa devina realitate. Orice dispozitiv ce depinde in mod curent de hidraulici, hidrodinamici sau hidrostatici poate beneficia de timpi rapizi de raspuns ai fluidelor electrorheologice si de reducerea complexitatii dispozitivelor. In consecinta, fluidele electrorheologice sunt cele mai promitatoare in aplicatiile in explorarea spatiului si industria automotive.
Fluidele electrorheologice dezvoltate recent pot insa opera la temperaturi mai inalte decat predecesoarele lor, dar oricum alte noi provacarii tehnice sunt luate in consideratie. Acestea include eforturi (forte) de forfecare scazute (joase) si lipsa unui fluid "universal". Tipic aplicatile automotive necesita eforturi de forfecare de la 2 pana la de 10 ori mai ridicate decat pot oferii fluidele actuale. Deasemenea, numeroase companii cu profil chimic prefera sa vanda produse ce pot fi usor incorporate in produsul finit al clientilor, iar din nefericire fluidele electrorheologice necesita o dezvoltare coordonativa a fluidului cu dispozitivul.
Schimbarea starii unui fluid ER are loc in timpi de ordinul milisecundelor sub aplicarea unui camp electric. Schimbarea este deasemenea complet reversibila- fluidul revine la starea sa pasiva coloidal in cateva milisecunde in absenta campului electric.Cateva teorii rapunzand la intrebarea "de ce un astfel de fluid afiseaza asemenea caracteristici sub influenta campului electric" au fost investigate, iar parerile impartite. Opinia multor cercetatori este ca particulele suspendate
devin polarizate si formeaza siruri ce se aliniaza de-a lungul directiei campului aplicat.
Aceasta teorie este astazi general acceptata
dar ceea ce nu este inca pe deplin inteles este de ce particulele sunt
polarizate si se aranjeaza ele insele in acest mod. O explicatie simpla este
aceea ca particulele formeaza dipoli.
Fig.2 Schema unui lant sferoidal format prin polarizarea particulelor sub actiunea unui camp electric
Pentru particulele continand apa, cum exista de altfel multe astfel de particule utilizate in prepararea fluidelor electrorheologice, aceasta ipoteza este destul de rezonabila stiind ca picaturile de apa formeaza intr-adevar dipoli sub influenta campului electric. Aceasta teorie este deasemenea atractiva deoarece are o corespondent magnetic in cazul fluidelor magnetorheologice, ce contin dispersii de particule feromagnetice. Oricum, au fost folosite si particule ce nu contin apa in fluidele electrorheologice si astfel ar parea ca aceasta teorie dipole ar fi o simplificare globala a efectului ER actual.
O alta teorie pentru comportamentul electric intr-un fluid ER este polarizarea indusa a unui strat dublu ionic in jurul fiecarei particule. Stratul se deformeaza in campul electric si in interactioneaza cu acesta sau se suprapune cu alt strat. Faptul ca timpii de raspuns a ER sunt asa de scurti, face aceasta explicatie mai probabila din moment ce doar stratul ionic se rearanjeaza si nu particula respectiva.
ERF-urile sunt in general recunoscute dupa comportamentul in acord cu modelul plastic Bingham pentru curgerea fluidelor, intelegand prin aceasta ca ele se vor comporta ca un solid pana la o anumita presiune (tensiune,stress) de curgere. La stressuri mai inalte decat acesta fluidul va curge, iar stress-ul de forfecare va continua sa creasca cu o rata de forfecare, astfel incat:
![]()
Unde : ![]() este efortul(forta) de forfecare,
este efortul(forta) de forfecare,![]() este efortul(forta ) de
curgere,
este efortul(forta ) de
curgere, ![]() este vascozitatea dinamica si
este vascozitatea dinamica si ![]() este deformatia de forfecare.
este deformatia de forfecare.
In general ,ambele, efortul de curgere si
vascozitatea vor fi functii de puterea campului electric. Semnul ![]() corespunde ratei de strain pozitiva
(negativa).
corespunde ratei de strain pozitiva
(negativa).
In conditiile in care nu este
aplicat un camp electric ERF sunt caraterizate in general printr-o viscozitate
Newtoniana ![]()
Modelarea unui fluid vascos dupa comportamentul plastic Bingham prezinta valabilitate in cazul unor teste rotationale unidirectionale constante pe erf-uri unde o frecventa rotationala data corespunde unei anumite rate de forfecare.
In cazul in care un fluid este forfecat intr-o modalitate biderectionala sau oscilatorie ecuatia Bigham nu ia in calcul elasticitatea fluidului,variatia acesteia fiind neliniara.
In modelarea matematica a comportamentului unui fuid electrorheologic, exista doua modalitati separate ce pot fi urmate. In primul rand fluidul poate fi modelat la scara microscopica, lucrand cu interactiuni moleculare si de particule, si in al doilea rand, se poate realiza combinarea la scara macroscopica a unor elemente discrete ca resoarte sau vascous dashpots si astfel obtinundu-se modelarea comportametului rheologic al materialelor.
In ceea ce priveste modelarea la nivel microscopic a comportamentului electrorheologic, sunt acceptate 2 tipuri de modele: dipole model si coduction model.
1.3.1.Dipole model
O abordare larg adoptata este aceea de a trata fiecare particula ca un "point -dipole" asociat cu un nucleu. Acest dipole model are un anumit succes in explicarea si predictia efectului electrorheologic. De exemplu, o predictie bazata pe dipole model , unde fundamentul starii fluidului este o latice tertagonala body-centred a fost confirmata experimental. Deasemenea variate simulari computerizate bazate pe modelul dipol au produs cateva rezultate satisfacatoare.
Cand fluidele ER au o nepotrivire dielectrica mica intre particule si lichidul de baza, aproximarea dipolara poate fi suficienta.
1.3.2.Conduction model
Oricum contributiile multipoli mai puternice pot fi importante cand nepotrivirea dielectrica este mare si particulele aproape ca se ating. Recent , s-a propus un model de conductie pentu a explica efectul ER sub campuri de curent continuu sau de curent altermativ joase, model ce este destul de diferit de cel al dipolului.
Acest model se bazeaza pe faptul ca distributiile de sarcina pe suprafata si campul pentru doua particule in contact sunt determinate de proprietatile de conductie a ambelor faze , faza de solid (sigma s) si cea de lichid (sigma l), trecerea curentului electric jucand un rol esential. In acest model (cu particule sferice) se distind doua zone: una externa unde suprafetele sferelor sunt aproximativ echipotentiale si rezistenta lichida este mai ridicata decat rezistenta solida si
zona de contact de raza delta , unde, invers, solidul are rezistenta solida mai mare.
Luand in consideratie cresterea conductivitatii lichidului datorita campului electric, este posibila predictia fortei de atractie la variatia cvasi liniara cu campul aplicat E0 pentru valori suficient de ridicate ale E0. Predictiile privesc legile de variatie dupa cum ordinul magnitudine al fortei au fost testate cu succes pe un experiment de scala pentru valori ale paramentrului conductivitatii G ss sL pana la 103.
Insa in cursul experimentelor de examinare a comportamentului "modelului sistem" a doua jumatati de sfera pentru valori mai ridicate ale lui G (intre 103 si 105) s-a observat ca ipoteza privind curentul de conductie in lichid nu mai este valabila. Aceeasi concluzie rezida in cazul fluidelor Electrorheologice din cauza numarului foarte limitat de specii disociabile lying in foarte micile volume dintre interfetele particulelor in contact. In ambele cazuri conductia nu este ohmica. Densitatea curetului este proportionala cu grosimea lichidului si depinde deasemenea de camp.
Pe de alta parte , modelul conductie propus, care pare a fi vazut din punct de vedere electric, neglijeaza complet procesele fizico-chimice responsabile pentru transferul de sarcina la interfetele solid/lichid. O imbunatatire a modelului este sugerata de procesele electro-chimice obtinute la interfete rezulta in injectii de ioni in interiorul lichidului, ce dau o crestere cu o a doua componenta in formula densitatii curentului. Rezulta astfel noi expresii ale fortei de atractie dintre doua particule sferice.
In ceea ce priveste modelarea la scara macroscopica se poate reprezenta o analogie mecanica a materialului ER, prin combinarea in paralel a trei elemente astfel, vezi fig: variatia neliniara a elasticitatii fluidului poate fi modelata printr-un arc neliniar softening, pierderile Newtoniene modelate printr-un vascos dashpot, care lasa doar caracteristicile de curgere sa fie emulate si un element damping colomb sau al frecarii. Deci o combinatie a unui vascos damper, friction damper si rigiditate neliniara par sa reprezinte raspunsul unui ER activat.
Fig.3.Modelarea macroscopica a comportamentului ERF
Atenuarea in faza vascoasa (amortizor)
Energia disipata de curgerea newtoniana intr-un material activat, este presupusa a fi liniara si reprezentata matematic prin expresia
![]()
Unde c este coeficientul frecarii vascoase(Nsm-1) si z viteza relativa de-a lungul damper.
Atenuarea la curgere (amortizor)
Rezultatele experimentale indica faptul ca un tip de stress de curgere este evident in materialul ER cand actioneaza printr-o deformatie de forfecare. Aceste stresuri de curgere descresc cu cresterea ratei de forfecare, asemanator unei forte de frecare cu coeficienti diferiti statici si dinamici, FCS, FCD, respectiv. Cand forta de curgere sau stresul schimba semnul (schimbarea de semn a ratei de forfecare) s-a observat ca procesul este ireversibil. Pentru a se lua in consideratie acest proces a fost utiliazate doua functii variind exponential.
Ecuatiile care descriu caracteristicile superioare si inferioare sunt:

stresul de forfecare se schimba la varful amplitudinii si s-a observat a nu fi abrupt. Pentru a se lua in consideratie acest fapt, a fost inclusa in ecuatie o functie de netezire care sa produca o schimbare finita a fortei in schimbul unui impuls brusc neprevazut. Functia de netezire are forma unei tangente hiperbolice, astfel incat ecuatiile devin:
Rigiditatea neliniara
Din rezultatele experimentale s-a observat ca rigiditatea este neliniara. Aceasta poate fi reprezentata printr-o tangenta hiperbolica cu amplitudine maxima variabila. Ecuatia fiind
![]()
unde z este deplasamentul relativ, A' este amplitudinea maxima corespunzand maximului fortei arcului si d controleaza abruptetea functiei tanh.
Ecuatiile fortei pentru fiecare element din model fiind deduse se poate dezvolta din fig ecuatia de echilibru a fortelor.
Pentru echilibru,
Forta in ERF, 
Caracteristicile de transformare reversibile proprii, pe o scala de timp de ordinul milisecundelor , de la o stare de lichid la una de solid in acord cu schimbarile campurilor electrice sau magnetice externe fac ERF-urile sa fie denumite si "fluidele receptive la stimuli" (SRF). Acest efect activeaza proprietatile mecanice ale unui dispozitiv, cum ar fi un amortizor de soc, sa fie continu ajustate in timp real corespunzator stimulilor de intrare cum ar fi suprafetele neregulate, prin acesta creend echipamente mai sigure si mai eficiente. Deasemenea, aplicatii ale SRF in dispozitive controlate computerizat, ultrarapide si realitate virtuala sunt dezvoltate.
Fluidele controlabile sunt acele fluide ale caror proprietati pot fi controlate prin aplicarea unui camp extern. Pot fi utilizate numeroase tipuri de campuri incluzand campul electric, magnetic, presiunea, etc. Un interes particular este acordat in aceasta lucrare, acelor fluide ale caror proprietati sunt controlate prin aplicarea campurilor electrice. Aplicatiile utilizand fluide electrorheologice sunt in mod tipic bazate pe controlul vascozitatii si rigiditatii fluidului.
O descriere amanuntita si edificatoare asupra fenomenului electroreologic este oferita de J.E. Stancroom. In urma numeroaselor investigatii si observatii microscopice, acesta a sintetizat comportamentul fluidelor electroreologice. Diferitele experimente au condus la concluzia comuna ca atunci cand ERF erau usor perturbate lanturi conturate se formau de-a lungul suprafetei electrozilor; in acelasi timp, cateva particule se desprindeau si se reasezau ele insele la lanturile existente astfel incat structura se transforma dintr-o latice initiala mai mult sau mai putin arbitrara intr-o structura definita de fibre. O perturbatie mai violenta rupea complet lanturile, dar lungimi scurte de lant persitau, chiar daca erau libere fata de electrozi, si se reasezau. Campul electric parea sa evoce o forta de atractie intre particule, producand formarea lanturilor, si schimbarea caracterisitilor de curgere observate in suspensiile starch. Gelul de silicon se comporta similar, cu toate ca tinde sa lipeasca la un electrod (electroforeza).
Comportamentul diferitelor tipuri de suspensii in campul electric la o observatie microscopica ar putea fi divizat grosso-modo in 4 tipuri:
particulele sunt aparent neafectate de catre camp. Ceea ce este rar
particulele migreaza catre un electrod (fenomenul de electroforeza). Acest comportament este probabil cel mai obisnuit.
Intr-o suspensie, de Nylon (perlon) pudra in alcool isopropilic, campul d.c. cauzeaza agitatia violenta a particulelor, formandu-se "vartejuri" care se rotesc cu viteza ridicata. Efectul este asa izbitor incat a fost considerat ca si cauza in ruperea nivelului de margine si imbunatatirea transferului de caldura. Acesta a fost in final identificata o forma a efectului electrostatic "pitch ball".
O larga clasa de materiale care alcatuiau lanturi, oferind lichidul de baza nu este conducatoare. Aceasta include celuloza, "sephdex" si alte resius ion-exchange, diferite ceramici, pudra de aluminiu, carbon negru etc.
Carbonul negru si aluminiul sugereaza ca mecanismul ar putea fi cel prezentat in fig. Fara particule, campul electric dintre electrozi ar fi liniar, dupa cum este prezentat prin linia intrerupta.
Cu particule conducatoare, pe de alta parte, ar fi induse sarcini pentru a anula local campul electric (linia plina) si aceste sarcini induse s-ar atrage reciproc electrostatic. Alte solide, ca si ceramica se comporta se comporta ca si conductoare datorita apei absorbite pe suprafata acestora.
Particulele cu o rezistanta foarte scazuta, ca aluminiul, ar cauza flash-over, dar daca particulele au o rezistenta ridicata, caderea de tensiune in particule ar reduce dipolii indusi (linia intrerupta).
Un posibil compromis ar fi de particule puternic conducatoare, incadrate de un strat isolator pentru prevenirea curentilor inalti. In acest caz la aplicarea campului electric, particulele formeaza lanturi ca si in gelul de silicon. Oricum, dupa cateva secunde campul electric fiind aplicat, lanturile se rup instantaneu in mijloc si se redistribuie pe ambii electrozi. Aceasta reprezinta " electroforeza bidirectionala" , care este de fapt bine cunoscutul fenomen de Dielectroforeza.
Toate aceste descrieri si observatii fiind prezentate poate ca ar fi interesanta la acest punct al lucrarii detalierea unei tehnologii de obtinere a suspensiilor si lichidului de baza din componenta unui fluid electrorheologic.
Modificarea suprafetei microcristalelor de celuloza
Sulfationreagent este preparat cu grija cu un amestec pre-racit de H2SO4 (<-10grade C) si de isopropanol pre-racit (<-10 grade C) la temperatura joasa intr-un garafa "three-neck". Avicel PH-101 particule microcristaline de celulosa sunt adaugate in garafa cand temperatura sistemului atinge o temperatura sub -6grade C. Se partreaza o temperatura constanta de -5.5 grade C pentru doua ore. Apoi reactiunea sulfatului de celuloza este stopata prin adaugarea unui exces de alcool, produsul este rapid inlocuit din starea de solutie prin filtrare. Particulele de sulfat de celuloza sunt neutralizate prin concentrati scazute de apa distilata, solutie de alcool. Apoi particulele sunt spalate cu apa distilata. Pentru a scoate apa din particule particulele sunt spalate cu acetone si uscate intr-un vaccum la temperatura camerei pentru cateva ore si la 70 grade C pentru ultimele doua ore. Sunt utilizate deasemenea particule de Celulosa de Carboxumethyl Sodiu (Na-CMC) cu diferite ale subtitutiei (DS=0.1,1.1) pentru prepararea fluidelor electrorheologice.
Prepararea Bazei fluidelor
Baza fluidelor este obtinuta din amestecarea VerssalGel 21868 si ulei MVI100N in diferite rapoarte.
Prepararea ERF
Fiecare esantion de particula este pre-uscat intr-un cuptor vaccum la 70-80 grade C pentru ultimele 2 ore. Fluidul de baza este uscat in cuptorul vaccum la o temperatura mai scazuta pentru doua ore. Erf se obtine din amestecarea unei concentratii de 30%de particule cu 70% concentratie a fluidului de baza.
1.5.Dispozitive bazate pe lichide electrorheologice
Controlul asupra proprietatilor rheologice ofera promisiunea unor noi posibilitati in inginerie pentru actionarea si controlul miscarii mecanice. Orice dispozitiv ce se bazeaza pe hidraulica poate beneficia de timpi de raspuns rapizi ai ERF-urilor si de reducerea complexitatii dispozitivului. Primele dezvoltarii in aplicatiile practice ale ERF-urilor au fost stanjenite de abordarea multidisciplicara necesara intelegerii acestora, care nu era deloc simpla. Cercetatorii de astazi continua sa imbunatateasca ERF-urile facandu-le sa detina proprietati cat mai atractive. Proprietaitle de tip solid a acestora in prezenta unui camp electric pot fi utilizate sa transmita forte de-a lungul unui interval considerabil, utile intr-un numar larg de aplicatii.
Actualele directii de cercetare si dezvoltare a aplicatiilor pe baza tehnologiilor cu materiale E.R. se concentreaza asupra urmatoarelor clase de mecanisme: supape, ambreaje, frane, mecanisme antivibratie, structuri flexibile cu materiale E.R.
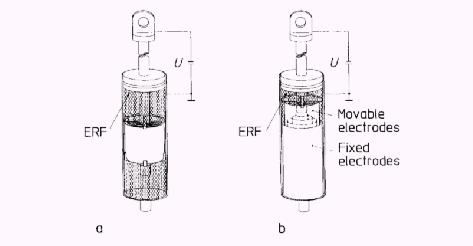
Utilizarea materialelor ER va avea un impact important asupra echipamentelor hidraulice iar aplicatiile amintite mai sus vor fi utilizate cu succes in diferite domenii ca : automobile, marina,aeronautica, roboti, industria constructoare de masini. Structurile mecanice reglabile ce utilizeaza materiale electro-rheologice se bazeaza pe 2 configuratii de baza :a) cu electrozi ficsi
b) cu electrozi mobili
materialul(lichidul) E.R. aflandu-se intre acesti electrozi intre care este generat un camp electric.In primul caz (a) exista o relatie intre debitul de lichid Q ce parcurge spatiul dintre electrozi si diferenta presiunii de la capete,iar in al 2-lea caz exista o relatie intre forta F ce produce deplasarea relativa a celor 2 electrozi si viteza relativa de deplasare a lor,v.Aceste relatii pot fi modificate variind intensitatea campului electric E dintre cei doi electrozi. Structurile de principiu ale celor doua configuratii amintite mai sus sunt relatate in Fig.4.1.1a si 3.1.1b.
Fig4. a) b)
Este o regula generala ca in proiectarea unui dispozitiv cu material electro-rheologic sa se incerce minimizarea volumului de material E.R. si a puterii electrice consumate.De asemenea se doreste un timp de raspuns cat mai mic al semnalului electric.In continuare sunt prezentate clasele de aplicatii mai frecvent intalnite.
1.5.1. SupapeE.R.
Supapele E.R. sunt dispozitive continand doar configuratii cu electrod fix a caror functionare,in principiu,este aceeasi cu cea descrisa mai inainte la pct.a). Daca lichidul care curge prin dispozitiv este o suspensie E.R. presiunea scade longitudinal si astfel,diferenta de presiune pe supapa(valva) sau debitul pot fi controlate prin aplicarea unui camp electric. Printre avantajele supapei E.R. regasim timpul redus si absenta partilor in miscare. Supapele (valvele) cu materiale electro-rheologice se pot dovedi foarte utile prin incorporarea lor in sisteme mai mari, obtinendu-se astfel mai multe tipuri de dispozitive reglabile. De exemplu, prin asamblarea valvelor E.R. intr-o configuratie ce reprezinta un echivalent hidraulic al unui montaj tip punte Wheatstone si prin conectarea unui astfel de aranjament la o sursa de presiune hidraulica obtinem la iesirea sistemului comanda deplasarii pistonului dintr-un cilindru cu posibilitatea selectarii sensului de miscare.
1.5.2.Supape si site basculante reglabile
Pe baza sistemului tip punte Wheatstone s-au dezvoltat site basculante reglabile sau vibratoare reglabile. Prin conectarea unui astfel de sistem la o sursa de presiune hidraulica se obtine la iesirea ansamblului o vibratie (oscilatie) controlabila prin intermediul campului electric. Cu studiul supapelor E.R. si experimentul pe dispozitive ce contin astfel de supape s-au ocupat W.M.Winslow (1949), R.W.Phillips si D.M.Auslander (1971), J.Argulles (1974), H.T.Strandrud (1966) a construit un ansamblu piston-cilindru cu 2 supape E.R. atasate pistonului solidar cu un ax la iesire. In timpul experimentelor a obtinut timpii de raspuns mai mici de 1 ms. De asemenea, la iesire a obtinut modele de forte sinusoidale cu amplitudini mari la frecvente de cca 1KHz. Ansamblul a fost utilizat la obtinerea unor site basculante reglabile.
1.5.3.Instalatii si mecanisme motoare reglabile
O alta clasa de dispozitive care au devenit reglabile prin implementarea tehnologiei supapelor din materiale E.R. o reprezinta instalatiile si mecanismele motoare (fig.5).
Fig.5
Aceste mecanisme contin o serie de tuburi si canale ce constituie cai pentru inertia fluidelor. Numarul, marimea si forma tuburilor sunt specifice aplicatiei. Introducerea supapelor E.R. drept componente ale cailor fluidice duce la posibilitatea variatiei in timp a inertiei fluidului si astfel rezulta controlul global al performantelor mecanismului.
T.G.Duclos in 1987 a proiectat un mecanism reglabil utilizand fluide E.R. cu cai multiple astfel selectate incat sa mentina rigiditatea dinamica la valori scazute in banda de frecventa 20.40Hz.
Un grup format din N.K.Petek si colaboratorii sai a dezvoltat si studiat (1989) un mecanism prototip cu doua stari: o stare numita OFF caracterizata printr-o amortizare foarte scazuta si un coeficient de elasticitate dinamic scazut si o stare ON caracterizata printr-o amortizare foarte puternica si un coeficient de elasticitate dinamic mare. Mecanismul a fost testat intr-o configuratie de sisteme cu reactie inversa, s-au aplicat reglari si comenzi la transmisia mecanismului de la distanta mica si de la distanta mare, s-au facut teste in intervalul de temperatura 0.1000 C, rezultatele fiind inregistrate.
G.Oppermann s.a. au extins (1989) domeniul temperaturilor pentru testarea la (-300C.1100C) si au efectuat teste de aduranta timp indelungat (cateva sute de ore) fara sa apara defectiuni.
1.5.4.Frane si ambreaje reglabile
Ambreajele E.R. se bazeaza pe configuratia de baza a dispozitivului cu electrod mobil, ele putand fi configurate fie in sisteme de cilindri concentrici fie in sisteme de discuri paralele(fig.6)
Fig.6
In 1983 J.L.Sproston s.a. au realizat o investigatie experimentala a momentului de torsiune transmis de-a lungul unui ambreaj cu discuri paralele cu un singur element. Viteza unghiulara s-a pastrat constanta . Experimental s-a facut pentru diferite grosimi ale incintei cu material E.R. si pentru diferite valori ale campului electric aplicat. S-a obtinut o relatie liniara intre momentul de torsiune transmis si tensiunea aplicata. S-au studiat efectele variatiei temperaturii materialului E.R. din dispozitiv.
De asemenea, unele investigatii s-au concentrat asupra determinarii unor modele de ambreaje tip cu discuri paralele. M.Seed s.a. (1986) au observat variatii ale performantelor mecanice ale franelor datorate modificarii vascozitatii materialelor E.R. din dispozitiv, cu tensiunea aplicata si temperatura. S-a realizat un prototip de frana cu discuri paralele capabila sa furnizeze un moment de torsiune de maximum 5Nm controlat printr-o conexiune cu reactie inversa. S-au studiat cu acest prilej: valoarea obtinuta pentru forta de farnare si valoarea momentului de torsiune tranzitoriu ce risca sa depaseasca capacitatea franei E.R.
1.5.5.Amortizoare reglabile
Ambele configuratii (cu electrod fix
sau mobil) pot fi utilizate pentru a crea amortizoare reglabile cu materiale E.R.(fig.7)
Fig.7
Principiul amortizorului de socuri utilizand ERF corespunzand a) flow mode,(modul curgere) b) shear mode (modul forfecare)
Intr-un amortizor cu placa fixa de amortizare intr-un piston e realizata prin controlul caderii de presiune de-a lungul canalelor care sunt asemanatoare supapelor si pe unde materialul E.R. este fortat sa circule.
Intr-un amortizor cu placa mobila forta de amortizare creata de rezistenta la forfecare, reglabila, intre pistonul in miscare, ce actioneaza ca un electrod si suprafata paralela, adiacenta, ce ramane nemiscata si constituie celalalt electrod. Prezenta unor acumulatoare la astfel de dispozitive este necesara datorita deplasarii unei mase de lichid E.R. in urma actiunii pistonului.
N.G.Stevens si colaboratorii sai au construit si testat pe la mijlocul anilor 1980 un amortizor cu placa mobila, reglabila, configurat intr-un sistem de ordinul 2, utilizat la amortizarea amplitudinii miscarii unei mase. Sistemul a fost excitat in domeniul de frecventa 0,5.5Hz pornindu-se de la o amplitudine constanta. In urma masuratorilor la diferite valori ale tensiunii aplicate electrozilor, s-a observat o variatie semnificativa si reglabila a amplitudinii estimate a miscarii masei.
In 1987 Z.P.Shulman si colaboratorii sai au realizat un studiu experimental si analitic asupra amortizoarelor cu materiale E.R. Modelul realizat a fost utilizat pentru a studia vibratiile libere si fortate si avea incorporat patru amortizoare E.R. cu placi mobile. S-au realizat teste pentru amplitudini de deplasare mici intr-un interval de frecventa de 4.40Hz.
D.K.Bhadra s.a. in 1989 au realizat un studiu analitic asupra fezabilitatii amortizoarelor E.R. utilizate ca si componente ale angrenajelor de la trenurile de aterizare ale avioanelor. Studiindu-se secventa de amortizare pentru avioane tipice, s-a propus o strategie de amortizare optima. S-a luat in consideratie aterizarea pe piste netede sau cu denivelari. S-a ajuns la concluzia ca materialele E.R.actuale nu intrunesc cerintele necesare dar ca exista premise pentru viitoare imbunatatiri ale proprietatilor lor.
D.A.Brooks impreuna cu colegii sai au experimentat in 1983 cu succes,in conditii de laborator,reducerea vibratiilor la elicopter utilizand materiale E.R. S-a utilizat o bara de amortizare de dimensiuni mari.Cateva caracteristici ale amortizorului:
-aria de interactiune a electrodului mobil cu cel fix este de aproximativ 3700cm2
-campul electric :3,7kV/mm
-puterea electrica consumata:50W
Acelasi colectiv si-a extins cercetarile si asupra unor amortizoare sub forma de bare de torsiune ca placa mobila pentru aplicatii cu vehicule grele de tren. Pentru o frecventa in domeniul 0.2Hz s-a atins valoarea de 1000Nm,moment de torsiune reglabil.
1.5.6.Structuri adaptive cu materiale E.R.
Conceptia utilizarii materialelor E.R. in structuri adaptive este foarte noua.Prin incorporarea unui material cu rheologie controlabila (cunoscuta) intr-o alta structura (pasiva) raspunsul sistemului devine controlabil. Asfel devine posibila pentru diferite structuri adaptarea la un mediu ambiant variabil in scopul continuei optimizari a performantelor.
Pana in prezent s-au studiat 2 calse de configuratii de baza care sunt prezentate in cele ce urmeaza (fig.8):
Fig.8 a) b)
Configuratia de forfecare
-Incovoierea axiala a structurii sub forma de bara produce materialului din structura, in principal, o deformatie de forfecare. M.V.Ghandi si colegii sai au studiat o varietate de configuratii de forfecare bazate pe structuri adaptive E.R. supuse unur medii ambiante cu vibratii. Ei au observat schimbari ale frecventelor naturale si ale coeficientului de amortizare in toate cazurile de aplicare a campului electric. Pentru simularea comportamentului reglabil s-a dezvoltat un model tridimensional utilizandu-se metoda elementului finit. Simularile au fost realizate folosind coeficienti de amortizare si constante de rigiditate determinate empiric.
Grupul Y.Choi si colegii sai au realizat un studiu experimental asupra unei grinzi incrucisate si grinzi in consola supuse unor vibratii libere. Au fost determinate valori pentru rigiditatea structurilor complexe ale intregului sistem. S-a observat controlabilitatea semnificativa a raspunsului sistemului la vibratii.
Proprietatile rheologice ale fluidelor ER pot fi schimbate foarte repede si reversibil, facand ca fluidele sa corespunda (fie favorabile) controlului in timp real al vibratiei.
Intrarile controller-ului fuzzy sunt semnale de la masuratorile amplitudinii si vitezei vibratiei la punctul final liber al structurii. Aceste semnale sunt fuzzificate si apoi alimentate (intretinute) intr-un mecanism de deductie. Acest mecanism decide valoarea fuzzy a variatiei de tensiune. Principiul regulei de gravitatie este utilizat pentru defuzzificarea valorii tensiunii. Scopul controller-ului proiectat este de a reduce amplitudinea vibratiei a (cilindrului) la un prag care este permis sub limita de putere (taiere) a structurii.
1.6.1.Procedura experimentala de obtinere a modelului
Obiectivul procedurii experimentale este de a investiga comportamentul dinamic al barii tubulare, umplut cu un material inteligent, intr-o varietate de diferite conditii de operare pentru a furniza o baza a evaluarii controlabilitatii acestei structuri in timp real.
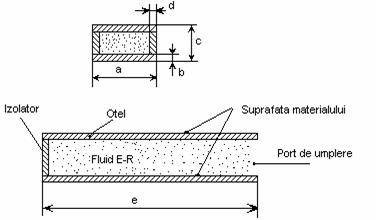
Geometria barii tubulare este
prezentata in figura 1. Dimensiunile barii sunt (in mm) a=22.5, b=1.4, c=4.6,
d=1 si e=205. Se utilizeaza 2 tipuri de fluide ER. Primul este 40% din (weight
corn startch), la o umiditate ambianta de 65%, in ulei transformator (ER-1), si
al doilea a fost 42% particule de zeolit (Z-3125) uscat pentru 9 ore la 170oC,
de asemenea, in ulei transformator (ER-2). Acest ulei este SHELL DIALA D DIN 57370 cu 9.5 cSt vascozitate
cinematica la 40oC, indicele de vascozitate 50 si densitate 0.864
kg/lt la 15oC. Materialul mostrelor este otelul si s-a ales ca
izolator intre electrozi un cauciuc .
Fig.9 Geometria barii tubulare
Fata superioara si cea inferioara a (beam) sunt utilizate ca 2 electrozi. Amplificarea tensiunii inalte schimba faza fluidului ER. Tensiunea furnizata este transformata de la 0-24 V la 0-3500 V. Tensiunea de iesire dorita este masurata printr-un multimetru digital (Soar ME 502). Ar trebui specificat faptul ca intensitatea maxima a campului electric, utilizat in aceasta investigare, a fost restrictionata la 1.296 kV/mm datorita proprietatilor dielectrice limitate ale (sealant).
1.6.2.Proiectarea algoritmului de control
Sarcina sistemului de control prezentat este de a reduce amplitudinea oscilatiilor (beam), datorita excitatiei externe, prin aplicarea tensiunii corecte la fiecare moment de timp. Intrarile sistemului de control sunt amplitudinea si viteza punctului final al (beam). Sistemul de control aplica tensiunea pentru a reduce magnitudinea lor. Oscilatiile (hollow beam) umpluta cu fluid ER este simulata ca un sistem dinamic cu un singur grad de libertate care este descris prin urmatroarele ecuatii diferentiale:
![]() (1)
(1)
unde f(t) este forta externa.
Din rezultatele experimentale s-au extras urmatoarele ecuatii:
 (2)
(2)
unde V este tensiunea aplicata
![]() (3)
(3)
Masa cilindrului cu fluid este 0.110 Kg. Au fost proiectate 2 metode diferite de control pentru controlul sistemului. In ambele, se presupune ca excitatia este necunoscuta. Primul algoritm de control se bazeaza pe procedura de estimare adaptiva a gradientului parametrului, iar a doua se bazeaza pe o schema fuzzy.
1.6.3. Sistemul de control fuzzy
Valorile de intrare ale sistemului fuzzy sunt deplasarea si viteza (hollow beam)in punctul in care este aplicata excitatia externa. Iesirea sistemului de control este valoarea tensiunii aplicate. Diagrama operationala este prezentata in figura 10.
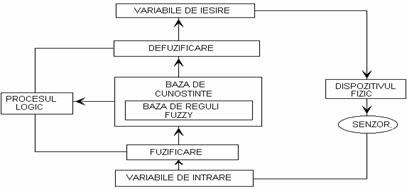
Fig. 10 Diagrama
operationala a sistemului fuzzy
Cum se poate vedea in ea, variabilele sunt fuzzificate prin utilizarea functiilor de aparteneta care sunt definite de subseturile fuzzy.
Pentru deplasare s-au construit 5 subseturi fuzzy. Acestea sunt urmatoarele:
PB = pozitiv mare
PS = pozitiv mic
Z = zero
NS = negativ mic
NB = pozitiv mic
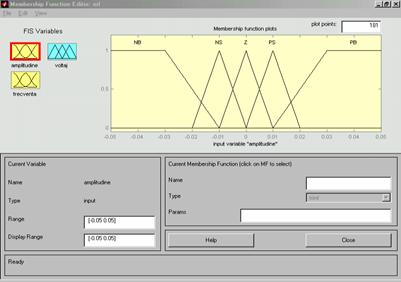
Pentru subseturile fuzzy ale vitezei
se folosesc aceleasi definitii. Subseturile fuzzy si functii lor de apartenenta
relative sunt prezentate in figura 11.
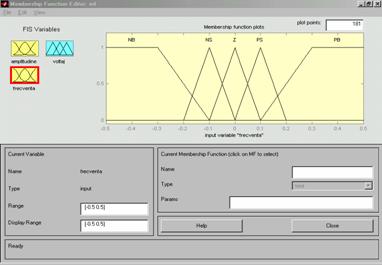
Fig.11 Distribuirea functiilor de aparteneta pentru
variabila de intrare amplitudine
Fig.12 Distribuirea functiilor de aparteneta pentru variabila de intrare frecventa
Urmatorul pas dupa fuzzificare este regula mecanismului de deductie.
Matricea adaptiva fuzzy (FAM), obtinuta prin aplicarea legii de control adaptiv si observarea la care sarcina principala este de a reduce raza ciclului limita asistemului.
Ca un rezultat ale acestora este urmatoarea scheme FAM care este construita prin utilizarea bilanturilor (exprimarilor) IF (Tabel 1).
|
|
NB |
NS |
Z |
PS |
PB |
|
NB |
Hi |
Hi |
Hi |
Hi |
Hi |
|
NS |
Hi |
Md |
Md |
MD |
Hi |
|
Z |
Hi |
Md |
Sm |
Md |
Hi |
|
PS |
Hi |
Md |
Md |
MD |
Hi |
|
PB |
Hi |
Hi |
Hi |
Hi |
Hi |
Tabel.1. FAM sistemului
Regulile mecanismului fuzzy au urmatoarea forma:
Ri : IF
(X=NB) AND (![]() =PS) Then (V=Hi)
=PS) Then (V=Hi)
Implicatia AND reprezinta operatia lui Zadeh de minim. Deci, functia de aparteneta a fiecarei reguli este calculata cu urmatoarea formula:
![]()
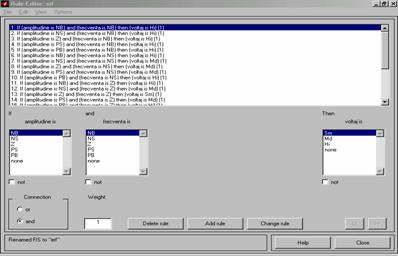
Fig.13 Reprezentarea in toolbox-ul fuzzy a bazei de reguli
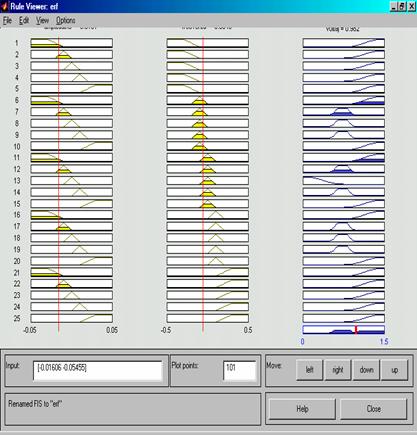
Fig 14 Reprezentarea in toolbox-ul fuzzy a modului de lucru a bazei de reguli (mecanismul de inferenta fuzzy) pentru anumite valori ferme
Tensiunea aplicata este cuantificata in 3 subseturile fuzzy, acestea fiind urmatoarele:
Hi = tensiune inalta
Md = tensiune medie
Sm = tensiune joasa
Functiile de aparteneta ale subseturilor fuzzy de tensiune sunt prezentate in figura .
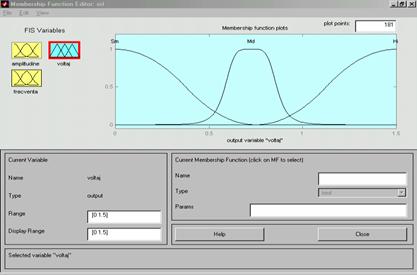
Fig.15 Distribuirea functiilor de aparteneta pentru variabila de iesire tensiune
Pentru extragerea valorii exacte a tensiunii, care trebuie aplicata, este utilizata metoda " centrul de gravitatie". Formularea generala a acestei metode este data prin urmatoarea ecuatie:
 (8)
(8)
Functiile de apartenenta ale tensiunii pentru fiecare nivel sunt egale cu valoarea minima a functiei de aparteneta a regulei care este implicata in subsetul specific al tensiunii.
Deoarece caracteristicile specifice ale metodei de defuzzyficare, functiile de apartenenta ale variabilei de tensiune trebuie sa fie suficient de netede. Din acest motiv, tipurile de functii de aparteneta, care au fost utilizate, sunt Curba-Pi pentru conditia de Md, Curba-S pentru conditia de Sm si Curba-Z pentru conditia de Hi.
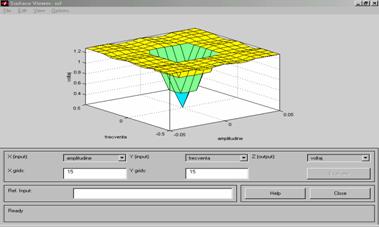
Fig.16 Suprafata generata de mecanismul de inferenta
fuzzy
1.7.Controlul pozitiei unui manipulator cu articulatie paralela utilizand actuatori valva electrorheologici
Recent s-a acordat o mai mare atentie manipulatoarelor cu articulatie paralela si aplicatiilor acestora. Manipulatorul cu articulatie paralela constand intr-o platforma mobila (in miscare) si o platforma de baza prezinta o serie de avantaje in comparatie cu un manipulator cu articulatie seriala, cum ar fi o puternica rigiditate a structurii si task-uri de sarcina mare .
Majoritatea manipulatoarelor cu articulatii paralele sunt activate prin servo-valve hidraulice. Pentru a imbunatatii acuratea si timpul de raspuns au fost larg dezvoltate variate tipuri de valve ca elemente cheie in sistemele de control hidraulic.Avand in vedere insa, complexitatea si costul acestora este de dorit sa se introduca o alternativa in mecanismele de actionare.
Una din noile abordari pentru atingerea acestui scop este utilizarea fluidului ER. Pe baza faptului ca proprietatile ERF sunt reversibile si se schimba practic instantaneu prin aplicarea unui camp magnetic fluidului dominant, numeroase activitati de cercetare au fost realizate in diferite aplicatii ingineresti.
Cand un ERF este implicat in sisteme valva, caderea de presiune a volumului de control poate fi acordata (ajustata) in mod continuu prin controlarea intensitatii campului electric.
Dintr-o simpla trecere in revista a activitatilor de cercetare derulate pana in prezent in domeniul ERF este evident ca majoritatea au fost concentrate doar pe modelare si analiza performantelor caderii de presiune dependente de camp. Cercetari ale controlului pozitiei unui sistem cu grade de libertate multiple sau mecanismele ce utilizeaza valve ER sunt destul de rare.
In lucrarea de fata este prezentat modul de proiectare si fabricare a valvelor cilindrice ER pe baza experimentelor obtinute din modelul Bingham al unui ERF bazat pe ulei siliconic.
Ca exemplificare a utilizarii acestor valve este prezentata o configuratie de manipulator cu articulati paralele cu trei grade de libertate activat prin trei seturi de circuite punte cu valve ER, precum si cinematica si ecuatiile dinamicii acesteia.
1.7.1.Actuatori valve ER. Valve cilindrice ER.
Proprietatile rheologice ale fluidelor ER pot fi schimbate reversibil depinzand de impunerea unui camp electric. ERF este schimbat din fluxul sau aproximativ Newtonian, in care particulele se misca liber intr-un compartament Bingham in care particulele sunt aliniate intr-un lant prin aplicarea unui camp electric.
O geometrie a unei valve cilindrice ER este prezentata in figura ce urmeaza.
Fig. 17. Valva cilindrica: a) geometrie, b) ansamblu
Caderea de presiune DP a valvei ER in
prezenta campului electric este obtinuta prin adunarea caderii de presiune
datorate vascozitatii DPh si caderii de
presiune datorate efectului ER DPER
asociata cu un stres de curgere. In cazul in care gap electrodului h este mult
mai mic decat raza r, caderea de presiune a valvei cilindrice ER poate fi
aproximata prin ecuatia urmatoare:![]()
![]()
unde
![]()
![]()
t reprezinta constanta de timp a valvei ER, L este lungimea electrodului, h este golul electrodului si QE este fluxul ce traverseaza golul electrodului sub campul electric impus. Prin incorporarea modelului Bingham obtinut experimental cu ecuatia , caderea de tensiune poate fi evaluata in raport cu intensitatea campului electric si parametrii de proiectare.
Fig b reprezinta ansamblul valvei fabricate. Materialul pentru electrodul de iesire (2) este aluminiu, in timp ce materialul utilizat pentru electrodul de intrare este otel inoxidabil (3). Accesoriul fix (anexa) (4) este utlizat sa mentina gap electrodului, si "O" inelul (1) este adoptat pentru a prevenii leakage a ERF.
1.7.2.Circuite punte cu valve ER
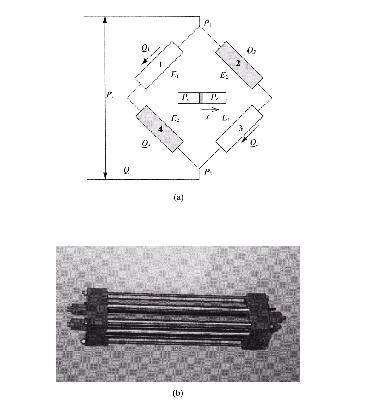
In
continuare se prezinta circuitul punte hidraulic cu patru valve ER. Valvele 1
si 3 sunt conectate electric, in timp ce valvele 2 si 3 nu. Controlul campului
electric aplicat valvelor 1 si 3 este notat E1, E2 este
notat pentru valvele 2 si 4.
Fig. 18 Actuator valva ER: a) circuitul punte; b) vedere reala
Qi (i=1, 2, 3, 4) reprezinta raportul de curgere a valvei corespunzatoare.
Utilizand legi hidraulice echivalente legii lui Kircoff pentru un circuit electric sunt obtinute urmatoarele ecuatii pentru caderile de presiune.
In ecuatiile de mai sus R =12hL/beh3. Presupunand cele patru valve identice, rezulta urmatoarele ecuatii din cele de mai sus.
Din ecuatiile de mai sus, reiese evident ca presiunile Pa si Pb pot fi controlate prin DPER(Ei) ca o functie a campului electric Ei.
Rezulta de asemenea urmatoarele ecuatii ale dinamicii.
![]()
![]()
![]()
Aici, Va si Vb sunt volumele volumelor de control a si b, respectiv. Termenul bER este bulk modulus a ERF. Acum substituind ecuatia 5 in ec. 4, si definind caderea de presiune DP=Pa-Pb, se obtine urmatoare ecuatie dinamica:
Se observa caderea de presiune DPER(E) este intodeauna pozitiva sin moment ce caderea de presiune creste odata cu cresterea campului electric. In plus, se cunoaste ca doar un singur tip de ERF este utilizat pentru actionare. De aceea, putem considera ca sistemul dat de ec. (6) ca un sistem cu o singura intrare luand in consideratie directia de miscare dupa cum urmeaza:
Cand x.>0, DPER(E2)>0 si DPER(E1)=0
Cand x.>0, DPER(E1)>0 si DPER(E2)=0
Trei seturi de actuatori valve ER cuprinse in circuitele punte ale ec(6) si (7) sunt construite pentru controlul miscarii a unui manipulator cu articulatie paralela cu trei grade de libertate.
1.7.3.Manipulatorul cu articulatie paralela cu trei grade de libertate
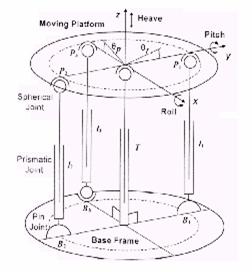
Manipulatorul consta in doua
platforme: o platforma mobila si o platforma de baza. Platformele sunt
conectate prin trei picioare identice, fiecare continand articulatii sferice
si/sau pin. Astfel, avem trei grade de libertate pentru miscarea pentru
ridicare (z), roll (qr) si pitch (qp) prin activarea
picioarelor.
Fig.19 : manipulatorul cu articulatie paralela cu trei grade de libertate
Pentru analiza cinematica a sistemului prezentat, intai obtinem urmatoarele ecuatii care reprezinta relatiile dintre deplasamentul de intrare (l1, l2, l3) si pozitia/orientarea iesirea (T, qr qp
![]()
unde b este distanta de la centrul bazei la articulatia Bi, si p este distanta de la centrul platformei mobile la articulatia pi. Acum , prin diferentierea ecuatiei (8), obtinem urmatoarele ecuatii ale vitezei intre intrare si iesire:
![]()
![]()
Unde
![]()
![]()
![]()
![]()
![]()
![]()
![]()
unde J este matricea Jacobian. Se stie ca variabilele de iesire in ec. (9) sunt definite prin [y1 y2 y3]T=[T qr qp]T. Pe de alta parte, putem de asemenea sa dedudem ecuatiile forta/moment din pricipiul lucrului mecanic virtual prin utlizarea matricei Jacobian J dupa cum urmeaza:
Aici Fcz este forta de control pe directia z, si Mcx si Mcy reprezinta momentele de control pe directiile x si y, respectiv. Termenul DPi in ec. (10) este caderea de presiune a actuatorului valva ER dat de ec. (6). Se observa din ec (10) ca proiectarea unui controler adecvat ui in mod direct implica controlul caderii de presiune, care este insotit de aplicarea unui control adecvat campului electric al actuatorului valva ER.
Pentru a deduce ecuatiile dinamicii miscarii ale mainulatorului prezentat, obtinem mai intai urmatoarele energii cinetica (K) si potentiala (P)
![]()
Unde m este masa platformei mobile, g este acceleratia gravitationala, si Ix si Iy reprezinta momentul de inertie a platformei mobile in jurul axei x respectiv y. Inlocuind ec. (11) in ecuatia Lagrange rezulta urmatoarele ecuatii ce guverneaza miscarea:
![]()
![]()
![]()
In practica, masa platformei mobile este supusa variatiei datorita schimbarii conditiilor de incarcare, si astfel rescriem ec.(12) prin considerarea parametrilor variabili dupa cum urmeaza.
![]()
![]()
![]()
unde,
![]()
![]()
![]()
![]()
In ecuatiile de mai sus, m0, Ix0 si Iy0 sunt valori nominale, in timp ce Dm, DIx, si DIy sunt partile variabile corespunzatoare.
Capitolul II. SMA-uri
In 1932, fizicianul suedez Arne Olander a descoperit un fenomen interesant in timpul experimentelor cu un aliaj al aurului (Au) si si cadmium (Cd). Aliajul Au-Cd putea fi deformat plastic printr-un proces de racire si apoi putea si reconstituit, "amintit" printr-un proces de incalzire, la configuratia dimensionala originala. Fenomenul este cunoscut ca "efect de memorie a formei", iar aliajele ce prezinta acest comportament numite SMA-uri.
In 1958, cercetatorii Chang si Read au demonstrat efectul memoriei formei la Brussels World's Fair. Ei au aratat ca SME poate fi utilizat in realizarea lucrului mecanic prin ridicarea ciclica a greutatii folosind un Au-Cd SMA. Cercetarea ulterioara a relevat alte materiale care au demonstrat acest fenomen.
In 1961, un grup de cercetatori de la U.S. Naval Ordnance Laboratory condus de William Beuhler au scos la iveala o smenificativa descoperire in domeniul SME si SMA-urilor. In timpul testarii rezistentei la caldura si coroziune unui aliaj din Nickel si Titanium ,ei au gasit ca este foarte pronuntat SME. Ni-Ti SMA s-a dovedit a fi semnificativ mai putin costisitor, usor de prelucrat ,si mai putin periculos din punct de vedere a sanatatii decat aliaje descoperite anterior. Acesti factori au readus in actualitate interesul in cercetarea SME si a aplicatiilor sale.
Cercetatori, proiectanti si companii au recunoscut potentialul utilizarii SME in aplicatii ingineresti. Ca rezultat din 1970,au inceput sa apara produse comerciale. In cea mai mare parte, primele dispozitive au functionat ca "fixatori" au preluat avantajele schimbarii dimensionale unice a memoriei formei. Cateva exemple din aceste dispozitive statice sunt cuplarile pentru sistemele de conducte si conectori electrici.
Ulterior cercetatori au inceput sa propuna dispozitive SMA pentru realizarea de task-uri dinamice, astfel acestia au inceput sa joace rol de actionari. Pentru a realiza task-uri dinamice ,SMA trebuie sa experimenteze un ciclul de incalzire, racire si deformare. Aceste cerinte determinat cateva companii ca Delta Metal in Anglia , sa foloseasca actionari SMA in sistemele de reglare a temperaturii unde temperatura mediului ar putea fi utilizata pentru actionarea termica. Delta Metal au propus ca Dispozitive SMA ar putea fi utilizate pentru inchiderea si deschiderea automata a ferestrelor de sera, valve ce controleaza temperatura cladirilor, si unor ambreiaje de control a ventilatoarelor automobilelor. In 1982, Sharp au incorporat actuatori SMA in cupoarele electrice dampers.In 1983,Honma,Miwa si Ighuchi au demonstrat ca actionarea SMA poate fi controlata incalzirea rezistiva si au propus ca actuatori SMA ar putea fi utilizati in micro-robotica. Cercetarea privind aplicarea si controlul actuatorilor SMA in sistemele robotice a continuat si exstins pana in prezent.
SMA-rile se compun dintr-un grup de materiale metalice care demostreaza capacitatea de revenire la o anumita forma sau marime definita anterior cand sunt supuse unei proceduri termice adecvate. Cateva exemple de aceste materiale Ag-Cd, Au-Cd, Cu-Al-Ni, Cu-Sn,In-Ti, Ni-Al, Ni-Ti, Fe-Pt,etc.
Efectul de memorie a formei se obtine datorita unui schimb dependent de temperatura si stress (efort), in structura cristalina a materialului intre doua faze diferite numite: martensite si austensite. Martensite, faza la temperatura scazuta, este relativ moale, pe cand Austensite, faza la temperatura ridicata,este relativ tare.
Pentru un exemplu (la nivel macroscopic) de efect de memorie a formei in actiune, se considera urmatoarele. Daca o bara dreapta dintr-un SMA in faza ei austensita (temperatura ridicata) pemite o racire sub temperatura de tranzitie a fazei , structura cristalina se va schimba in martensite. Daca bara este deformata plastic, prin sa spunem incovoiere (indoire) si apoi reincalzita pana la a temperatura mai mare decat temperatura de tranzitie a fazei , acesta va revenii la configuratia sa originala dreapta. Pentru a intelege acest fenomen este util sa consideram o reprezentare bi-dimensionala a aranjamentului cristalin al materialuilui prezentat in figura urmatoare.
Fiecare casuta reprezinta o
particula cristalina a materialului.
Celulele formeaza o structura puternic intinsa , insemnand ca acestea sunt
orientate simetric de-a lungul marginilor casutelor, celulelor. Structura intinsa
permite laticei interne a cristalelor individuale sa se schimbe cat timp se
mentine inca aceeasi interfata cu cei adiacenti.Ca si rezultat, SMA-urile pot experimenta deformatii
macroscopice intr-un interval mare atat timp cat este mentinut un ordin
remarcabil in structura sa
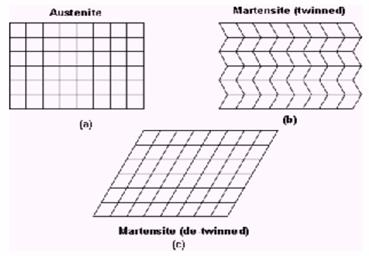
microscopica.
Fig 1.
De exemplu daca o piesa din SMA incepe ca austensite (Fig 1 a), laticea atomica interna a fiecarei celule este patratica, creand celule cu unghiuri mai mult sau mai putin drepte. Daca, apoi este permisa racirea sub temperatura de tranzitie de faza, structura cristalina se schimba in martensite (fig 1b) si celulele se transforma intr-o structura reprezentata prin diamante. De notat ca celulele se aliniaza pe diferite directii pentru diferite straturi. Acum daca un stress suficient este aplicat, structura martensitita din fig 1b va incepe sa "curga" si "relaxeze" dupa cum celulele se reorienteaza astfel incat acestia sunt toti orientati in aceali directie (fig 1 c).
Acest comportament poate fi mai bine inteleasa prin examinarea unui curbe tipice Stress-strain (efort-incordare) pentru faza martensite (fig 2)
Pentru stressuri mici, structura reprezentata de fig 1 b se comporta elastic (regiunea 0 la 1). La 1, materialul "curge" se "relaxeza" se obtine intre 1 si 2. La 2, structura martensitica este in intregime relaxata dupa cum este reprezentata in fig 1 c. Acum se obtine o a doua regiune elastica de la 2 la 3. La 3, incepe o deformare plastica permanenta ce nu este reconstituita prin efectul de memorie al formei.
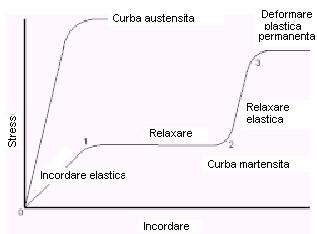
Fig 2
Schimbarea ce se
obtine in timpul efectului memorie formei cu o structura cristalina a unui SMA
nu este un proces termodinamic reversibil .Cu alte cuvinte are loc o disipare a
energiei din cauza frecarii interne si crearii defectelor structurale. Ca
rezultat are loc un histerezis al temperaturii care este ilustrat in fig 3 a.
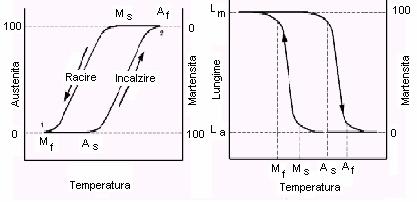
Incepand cu 1, materialul este 100% martensite. In timpul incalzirii compozitia martensite/austensite urmareste curba de jos . Cand temperatura atinge As, incepe sa se formeze austensitul. Austenitul continua sa se formeze pana cand temperatura Af este atinsa si materialul este 100% austenite. Daca are loc un proces de racire de la 2, compozitia de material urmareste curba de sus. Cand temperatura scade la Ms, incepe sa se formeze martensitul si continua sa se formeze pana cand este atinsa temperatura Mf. Acum materialul este revenit la conditiile initiale- 100% martensite.
Acest histerezis al temperaturii se translateaza direct intr-un histerezis in relatia incordare/temperatura fig 3 b.
Comportamentul de histerezis prezinta o provocare in dezvoltarea schemelor de control si modelare pentru actuatori SMA. Pentru un SMA dat, histerezisul este dependent de compozitia aliajului si de procesele de fabricatie. Majoritatea SMA prezinta o largime a buclei de histerezis de 10 pana la50 grade C, cu exceptia unor aliaje cu un histerezis mai lat utilizate in aplicatiile de alipire cum ar fi cuplarea..
SMA: functionare si inteligenta (ex la nivel macroscopic
SMA-urile ofera potentiale atractive cum ar fi: incordari reversibile in cateva procente, generarea unor revenirea la un nivel ridicat al stres, si un raport ridicat putere/greutate.
SMA-urile sunt de fapt materiale functionale. Acestea sunt mai mult importante pentru ceea ce fac (=o actiune) decat prin ceea ce sunt (=un material). Proprietatile specifice ale SMA-urilor sunt ilustrate in fig 4 la fig 5 prin exemplul unui resort realizat din SMA. Functiile pe care aceste aliaje le pot realiza, sunt impartite in 5 mari categorii.
Revenirea libera se refera la aplicatiile in care functia singulara a elementului cu memorie este cea care cauzeaza miscarile sau incordari pana la 8%( vezi fig 4: efectul de memorie one-way si fig 5 efectul de memorie two-way
Fig.4 Efectul de memorie one-way. Esantionul este deformat (A la B) si neincarcat (B la C) la o temperaturamai mica decat Mf. Deformarea reziduala este reconstituita in cursul procesului de incalzire la o temperatura mai mare decat Af.
Fig.5 Efectul de memorie two-way. Se produce o schimbare spontana de forma in cursul procesului de racire la o temperatura sub Mf (A la B). Aceasta schimbare de forma este reconstituita in cursul procesului de reincalzire la o temperatura mai mare decat Af (B la C).
Revenirea constransa (restrictionata) include aplicatiile in care elementul de memorie este prevented de schimbarea formei si astfel genereaza forte (eforturi) de pana la 800Mpa (fig 6)
Fig.6 Generarea eforturilor de revenire a formei. Esantionul este deformat (A-B) si neincarcat (B-C) la o temperatura sub Mf. Stress-urile de revenire sunt generate in timpul procesului de incalzire (D-E) incepand de la temperatura de contact (D), situata intre As si Af.
Actuator sau aplicatiile de producere a lucrului sunt acelea in care exista o miscare impotriva unei forte bias si astfel un lucru mecanic, pana la 5 J/g, este realizat utilizand un element cu memoria formei.
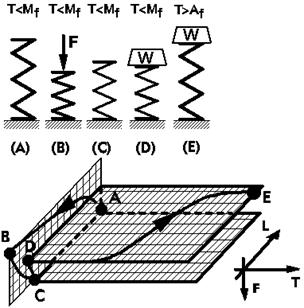
Fig.7 Iesirea lucrului mecanic. Esantionul este deformat la o temperatura sub Mf (A-B), urmat de neincarcare (B-C) si apoi iarasi incarcat la o greutate W (C-D). Reconstituirea formei se produce prin actionarea unei forte opuse W in cursul procesului de incalzire la o temperatura mai mare decat Af (D-E), astfel se realizeaza lucru mecanic .
Aplicatiile superelastice sau pseudo-elastice sunt de natura isotermica si implica stocarea energie potentiale

Fig.8 Efectul superelastic. Esantionul este puternic deformat la un stress relativ scazut (A-B)la o temperatura mai mare decat Af. In cursul descarcarii secventiale se produce o reconstituire completa a formei (B-C)
5. Capcitate damping ridicata: aceste aliaje prezinta in starea de martensitic o frecare interna dependenta puternic de amplitudine. Pentru impactul incarcaturilor,capacitatea specifica de damping poate fi la fel de ridicata ca si 90%.
Shape memory alloys reprezinta o clasa speciala din categoria materialelor adaptabile (inteligente), care pot converti direct energia termica in lucru mecanic (mechanic work). O varietate de aliaje ,realizate printr-o amestecare adecvata, expun acest efect, prin tratamente repetate de incalzire.
Efectul de memorie a formei one-way se obtine cand unul dintre aceste aliaje speciale este deformat mecanic la temperaturi scazute,si apoi incalzite la o temperatura mai mare decat o temperatura critica de tranzitie,rezultand restaurarea formei originale (efectul de memorie ) a specimenului. Alternativ, SMA-urile pot fi antrenate (instruite) sa prezinte efectul de memorie a formei Two-way, unde prin procesul de incalzire rezulta un SMA intr-o forma memorata, in timp ce prin procesul de racire rezulta un SMA intr-o a doua forma, diferita de prima.
SMA-urile prezinta cateva proprietati care le fac potrivite pentru anumite aplicatii. Acestea sunt puternic adaptive, compacte, foarte usoare ca si greutate, si au un procent forta/greutate foarte ridicat.Deasemenea coeficientul damping pentru SMA-uri se schimba in functie de temperatura si este foarte ridicat comparativ cu otelul, chiar la valoarea sa cea mai joasa apropiata de temperatura de activare. Aceasta face SMA o optiune atractiva pentru passiv damping.
Dintre multele aliaje care demonstreaza efectul de memorie a formei, nitinolul a fost investigat in mod predominant pentru compusi hibrizi ai SMA. In general, exista doua abordari in modelarea constitutiva a materialelor SMA:
Modele cu neliniaritate elastica, uni-dimensionale, care sunt similare cu deformarea, sau teoria inelasticitatii Hencky.
Modele termodinamice, tri-dimensionale, care consista din energie libera si disipare de potential, iar ecuatiile constitutive rezultate sunt similare cu teoria inelasticitatii incrementale.
Shape memory alloy (SMA) poseda proprietati termomecanice remarcabile, ceea ce conduce la un mare numar de aplicatii unde acestea pot fi utilizate ca actionari, conectori, dipozitive de impingere (manipulare),etc.Proiectarea componentelor cu memoria formei este in principal bazata pe "trial-and-error" ,(experiment-si-eroare, invatarea din greseli) din cauza ca nu exista suficinte instrumente de modelare numerica adecvate. De cele mai multe ori, pentru o singura aplicatie, trebuie construite o serie de prototipuri pentru a fi realizate cerintele functionale. Pe langa faptul ca aceasta practica poate fi costisitoare, adesea un intreg proiect este abandonat deoarece nu sunt atinse pefomantele optime. De aceea este obligatoriu sa se dezvolte un model cat mai complet care sa surprinda toate propietatile SMA-urilor,si astfel implemetandu-l printr-o tehnica adectava sa se faciliteze obtinerea unor noi aplicatii industriale ale SMA. Cel mai important pas este probabil, elaborarea unei legi de material, matematica sau numerica, numita relatie constitutiva, care ar descrie corect , comportamentul termomecanic complex al SMA-urilor ca si pseudo-plasticitatea, efectul de memorie al formei, superelasticitatea, etc.
Cu o asemenea lege a materialului odata obtinuta si implementata in aceasta lucrarea prin logica fuzzy , poate fi calculat comportamentul complex 3D dipozitivelor cu memoria formei cu incarcaturi (sarcini) termomecanice generale. Aceasta ar conduce la imbunatatiri importante in procesul de proiectare, si deasemenea asupra peformantelor globale ale dispozitvul respectiv.
Datorita progresului recent in dezvoltarea legilor materialul a SMA-urilor, situatia ia o aploare rapida, dar o formulare generala care sa incorporeze fiecare gen al remarcabilului comportament termomecanic al SMA nu a fost inca gasita. Multi autori au propus relatii consitutive, care ar putea fi divizate in doua categorii, astfel din punct de vedere micromecanic si din puct de vedere fenomenologic.
Utilizarea actuatorilor SMA ofera o alternativa interesanta metodelor actionare conventionale. Avantajele acestora creaza motivatia de a reduce semnificativ dimensiunea, greutatea si complexitatea sistemelor robotice. Inainte de toate, actuatori SMA poseda un raport forta/greutate extrem de ridicat. K. Ikuta a comparat toate tipurile de tehnologii de actionare (de la motoare de cc mici la gas turbines). Si a concluzionat ca actuatorii SMA ofera cel mai ridicat rapor putere/greutate la nivele scazute ale greutatii (sub 100 grame). Aceasta face ca SMA sa fie extrem de atractive in tehnologia microactuatorilor. De aceea este de asteptat ca actuatori SMA sa devine o unealta foarte important in proiectarea in domeniul micro-actionarilor care se dezvolta atat de rapid.
Un actuator Ni-Ti poate aplica un stress de actionare de 500Mpa. Deci un fir Ni-Ti de diametru de 150 micrometri ,poate aplica o forta de 8.8N (0.897 kgf. Daca firul este de 10 cm lungime , ar cantarii 11.4 mg si ar putea contracta 0.85cm. Astfel actuatorul poate ridica un obiect de 78000 de ori mai mare decat propria sa greutate in jur de 1cm.
Actuatorul poate fi redus la un singur element SMA, adica, un fir SMA activat electric. Miscarea si forta pot fi usor modificate prin selectarea elementului SMA, exemplu, firul SMA versus resortul SMA.Parti aditionale ca angrenaje de reducere (reduction gears) nu sunt necesare.
Deasemenea actuatorii SMA sunt incredibili de compacti si simpli. Un sistem de actionare cu SMA se compune doar din elementul SMA si o metoda de incalzire si racire. Metoda de racire poate fi la fel de simpla ca si o combinatie de natural convection, conduction, si radiation. Un ultim avantaj ar fi faptul ca operarea se realizeaza fara producere de zgomot acestia oferind crearea conditiilor de lucru intr-un mediu curat, silentios, si gravitatie zero. Pe cand actuatorii conventionali produc o mare cantitate de zgomot, actuatorii SMA sunt complet silentiosi.
Din moment ce frecarea este absenta in actionarea elementelor SMA, poate fi evitata producerea particulelor de praf si invers un mediu cu praf nu are nici o influenta asupra actionarii elementelor SMA. Deasemenea din moment ce nu exista parti aditionale de vibratie, activarea este aproape fara zgomot. Emisia acustica creata de transformarea in martensite poate fi detectata doar cu detectori foarte sensibili.
Din moment ce nu este necesar un voltaj ridicat si comutatori electrici, actuatori SMA pot functiona fara generare de scantei permitandu-le sa opereze in medii puternic inflamabile.
Actuatorii SMA pot fi controlati in asa fel incat acceleratii sunt generate cu ordine de marime de doar cativa microni. Aceste miscari foarte line sunt extrem de potrivite in aplicatii ale spatiului unde acceleratii chiar foarte mici pot influenta miscarea globala a capsulelor spatiale sau satelitiilor.
Actuatorii SMA prezinta intr-adevar si unele dezavantaje care trebuie luate in considerare si analizate, cand se decide utilizarea SMA pentru o aplicatie.
In primul rand acestia, opereaza cu o eficienta scazuta. Un actuator SMA este efectiv o heat machine unde materialul converteste energia termica direct in lucru mecanic. De aceea eficienta actuatorului nu poate fi mai mare decat a ciclului Carnot. Eficienta ciclului Carnot este scazuta la temperaturile la care Actuatori SMA tipici opereaza, nedepasind 10 %.
In al doilea rand, Actuatorii SMA la o latime de banda scazuta, insemnand ca acestia sunt relativ inceti intr-un ciclu.Timpul unui ciclu este in primul rand dependent de caracteristicile de transfer ale caldurii a "sistemului de racire" a SMA. Parametri ce afecteaza latimea benzi sunt temperatura si tipul mediului inconjurator, si de raportul suprafata/ volum a elementelor SMA.
Dependenta de mediu a procesului de disipare a caldurii poate constitui o problema. Pentru o temperatura ridicata, low convection a mediului, schimbul de caldura cu mediul inconjurator este redus rezultand o latime de banda scazuta. Pentru o temperatura scazuta sau high convection a mediului , schimbul de caldura este imbunatatit si latimea de banda este marita. Oricum, un schimb de caldura mai mare presunune ca este de asemenea necesara o putere mai mare pentru a se atinge temperatura de actionare.
In proiectarea unui actuator SMA pentru un mecanism, una din primele decizii este specificarea sursei de caldura pentru actionarea unui element SMA. In anumite aplicatii specializate, poate fi utilizata ca si sursa de caldura temperatura mediului inconjurator. Aceasta metoda ofera o excelenta optiune in proiectarea mecanismelor de reglare a temperaturii. De exemplu, un element SMA poate fi plasat intr-un mediu (sa zicem aer) a carei temperatura necesita reglarea. Elemetul SMA fabricat astfel incat temperatura sa de actionare sa corespunda unei temperaturi critice a mediului. Cand mediul atinge temperatura critica, elementul va actiona si deschide o valva suplinand o racire mai mare. In acest caz, elementul SMA se comporta in ambele sensuri ca actuator si ca senzor. Nici un fel de electronica nu este necesara in acest incredibil de simplu sistem.
Pentru alte aplicatii, sursa tipica de caldura pentru atingerea temperaturii de actionare este incalzirea joule prin curent electric. Sursa de curent poate fi fie DC fie AC.Daca este utilizata o sursa de AC, aceasta trebuie sa fie la o frecventa semnificativ mai inalta decat grosimea benzi la care sistemul cu SMA este actionat, pentru a evita fluctuatii ale deplasamentului.
Un exemplu de actuator care pare sa rezolve avest dezavantaj este prezentat in continuare. In cazul acestui actuator este interesanta solutia de proiectare unde un mecanism de ambreiaj de frecare leaga tija de iesire de heat sink. Firul de SMA este fixat la centru actuatorului iar cele doua capete sunt ancorate la distanta pentru a tensiona firul.

Fig. 16 Schema de operare a ambreiajului
Initial ambele parti ale firului sunt la temperatura camerei si de aceesi lungime. Daca partea superioara a SMA este incalzita, se contracta cauzand miscarea actuatorului in sensul acelor de ceasornic. Ambreiajul trage heat sink de-a lungul centrului actuatorului pana cand aceasta intra in contact cu partea inferioara a firului fig b. daca partea superioara este incalzita in continuare actuatorul continua sa se roteasca,dar ambreiajul aluneca, permitand heat sink sa ramana in contact cu partea inferioara. Dispozitivul de racire raceste firul inferior parmitandu-i sa fie intins cu usurinta. De indata ce firul nu mai este incalzit forta exercita de fir scade, iar heat sink pe deplaseaza pe partea opusa a firului . Chiar pe durata unei miscari repetate cele doua parti ale firului nu sunt niciodata incalzite in contact cu heat sink, ceea ce ofera un consum de putere mult mai mic decat in cazul in care heat sink ar fi fix.
Un alt dezavantaj a actuatorilor SMA este atingerea unui modul mic a deplasament. Avand disponibil o incordare de doar 8,5% (pentru Ni-TI), mecanismele actionate prin SMA, carora li se cere sa creeze miscari largi trebui sa fi proiectate inteligent. Convertirea miscarilor mici in miscari largi vine cu o reducere inevitabila a avantajelor mecanice.
Un ultim dezavantaj, si subiect al multor cercetarii, il prezinta dificultatea controlarii actuatorilor SMA. Efectul de memorie a formei este un fenomen puternic neliniar. Neliniaritatile sunt prezente in proces din cauza comportamentului de histerezis descris anterior, schimbului de caldura neliniar, si oricarei schimbari neliniare a parametrilor care afecteaza compozitia fazei materialului (temperatura, stress). Un alt obiectiv de control este deflectia completa a elmentului SMA se produce peste un interval de temperatura mic facand dificila realizarea unui control de acuratete a contractiei partiale.Deasemenea controlul se face dificil din cauza elasticitatii structurale a actuatorilor SMA.
Fig. 17 prezinta o comparatie intre logica de control a actuatorilor utilizand dispozitivele conventionale cum ar fi motoare hidraulice si acelea ce implica un arc SMA. In sistemele de control secvential, arcul SMA este capabil sa combine functiile angrenajelor (gears) si legaturile (cuplele) motoarelor si functiile sistemului de control. In sistemele de control cu reactie, schimbarea rezisitivitatii observata SMA functioneaza prin transformarile sale este utilizata pentru furnizarea feedback-ului pozitional, astfel comportandu-se ca si actuator si detector de pozitie. Simplificarile rezulta in proiectare si in faptul ca dispozitivele nu au parti rotationale si sliding, fac super-miniaturizarea si integrarea posibile.
Viteza de raspuns a unui actuator este controlata prin procesul de racire; prin cresterea densitatii curentului se pot obtine miscari rapide in ciclul de incalzire, dar racirea poate fi afectata doar prin conductia termica de la suprafata. Astfel din punct de vedere ingineresc trebuie luate masuri in general privind cresterea ratei de racire.
Fig.17
Cele mai obisnuite metode utilizate prentru cresterea ratei de pierdere a caldurii, sunt de a marii suprafata si la o ratie din volum ( via filme, benzi) sau prin inlantuirea unui material heat-sinking intr-un fir ( cum ar fi banda de silicon sau cupru).
Imbunatatiri considerabile ale timpului de raspuns pot fi obtinute prin combinarea acestor doua metode, dar adesea poate fi dificil sa se mentina o integritate puternica a lantului. Cei mai rapizi timpi sunt atinsi prin utilizarea apei ca si mediu de operare.
Trebuie luat insa in considerare consumul de energie al dispozitivului de actionare care creste inevitabil odata ce aceste metode de reducere a timpului de raspuns sunt aplicate.
Materialul SMA poate fi modelat in aproape orice actuator de forma imaginabil. Tot ce este necesar este un tratament de incalzire pentru a defini configuratia dimensionala a actuatorilor in faza de austenite (actionat). Cateva din formele care se utilizeaza sunt : fire, resoarte, cauciuc, foite si tuburi.
Cu toate ca un actuator SMA poate fi proiectat astfel incat I se aplica o forta in trei dimensiuni (depinzand de directia in care a fost deformat din configuratia de memorie), mare majoritate a actuatorilor SMA aplica o forta de incordare (extensie) pe o singura directie si nu o pot aplica direct o forta compresiva. Pentru a aplica o forta compresiva, dimensiunile actuatorilor trebuie sa fie destul de largi ca sa asigure rigiditatea si sa previna blocarea. Dupa cum s-a vazut anterior, dimensiunile mari ar cauza o scadere majora a raportului suprafata/volum, si in consecinta a latimii benzi. Rezultatul final este pentru a avea un actuator SMA cu suficienta latime de banda, elementul SMA trebuie sa fie subtire, facandu-l capabil doar de aplicarea fortelor de incordare. Din moment ce majoritatea mecanismelor necesita miscari ciclice, este necesara o forta bias pentru a face mecanismul sa revina in directia opusa fata de cea care acesta a fost tras prin actuatorul SMA. Aceasta forta bias poate fi suplinita prin energia potentiala stocata (gravitatie sau un resort) sau poate fi furnizata de un alt actuator SMA lucrand antagonic. In fig sunt prezentate cateva exemple simple de forta bias.
Mecanismele foarte simple din fig pot produce doar miscari lineare mici. Pentru a produce miscari mai ample, un actuator SMA trebuie atasat inteligent la mecanismul respectiv. Pentru un mecanism simplu, constituit dintr-o legatura de miscare care pivoteaza in jurul unei articulatii fixe de rotatie, deplasamentele liniare mici ale actuatorului SMA pot fi convertite in miscari unghiulare ample, prin fixarea unui capat al actuatorului si atasarea celuilat capat (cel liber) la articulatie aproape de centru de rotatie al articulatie de rotatie. Acesta este foarte similar cu modul in care muschi biologici misca legaturile ce alcatuiesc corpul. Bineinteles ca avantajul mecanic este pierdut dupa cum capatul liber al actuatorului se apropie de centru de rotatie. In aplicatiile robotice SMA sunt utilizate pentru a furniza configuratii compacte, de greutate mica, miscari usoare si line (netede) si miscari tridimensionale.
Aceste caracteristici ofera avantaje particulare in mediile greu accesibile cum ar fi cel subacvatic, spatial, nuclear si medical. Multe obiective tehnice cum ar fi viteza de raspuns si precizia controlului trebuie insa imbunatatite. Nu in ultimul rand robotii utilizand SMA creaza oportunitatea de a construi roboti ce se aseamana cat mai bine si sunt intr-o perfecta armonie cu modelele din natura si realitatea inconjuratoare. Cateva prototipuri de manipulatoare tri dimensionale si roboti pasitori dezvoltati cu preponderenta in Japonia sunt prezentati in aceasta lucrare.Un exemplu de micro-manipulator SMA acoperit cu o banda de silicon. Banda se comporta ca un biasing "spring" pentru un fir de Ni-Ti de dimensiunea de 0.2 mm. Actuatorul realizeaza 2 cicluri pe secunda cand este imersat in apa.
Fig 18
Manipulator SMA tip muschi- Umarul, cotul si mana sunt construite din fire de Ni-Ti si arcuri biasing. Diametrul foarte fin al firului (0.2 mm) permite o miscare rapida.
Fig 19
Doua exemple de "animal" mecanic care se poate misca lin fara zgomot asemanandu-se foarte mult cu modul de miscare al unei insecte. Miscarile sunt controlate printr-un microcomputer.
Fig 20
Un brat robotic construit de Hitachi analog unei mani umane ce poate prinde o bila foarte delicata (fragila) fara a o deteriora.
Similar bratului un alt gripper cu SMA este utilizat pentru prinderea si transportul foliilor (placilor) semi-conductori fara deteriorea acestora. Actuatorul este simplu construit si ajuta in mentinerea curateniei, in spatiile fara praf, in special in camerele vacuum.
Un endoscop robotic utilizeaza cateva segmente articulate (top) oferind un brat capabil sa realizeze miscari complexe, articulate in spatii tridimensionale.
Un alt exemplu de aplicabilitate a SMA in robotica este dezvoltarea unui robot pentru operatii subacvatice sau in medii greu accesibile cu o geometrie care imita pe cea a unui crab.

Fig.21 Schema de baza a robotului-crab, cu 6 picioare, fiacare avad 2 articulatii
Fig. 22 Schema de baza a articulatiei cotului
2.6.Aspecte privind proiectarea optimala a actuatorilor SMA pentru microgripere
Astazi, proiectarea griperelor cu o dexteritate ridicata pentru aplicatiile robotice constituie o mare provocare. Acestea sunt componente cheie in sistemele de tele-chirurgie ca si in sistemele de asamblare a micromasinilor si partilor lor componente.
In aceste aplicatii, griperele trebuie sa satisfaca constrangerile de accesabilitate si sa fie capabile de prinderea materialelor de diferite forme cu comportamente mecanice necunoscute ( de ex pansamentele foarte usoare si moi in aplicatiile chirurgicale).
Acestea motiveaza utilizarea griperelor articulate cu o dexteritate foarte mare. Actuatori adecvati sunt esentiali in acest context.
Mai mult decat satisfacerea constrangerilor geometrice, acestea trebuie sa adapteze (ajusteze) capabilitatile de transmisie forta/miscare necesare, prin task-uri de contact in termenii amplitudinii si preciziei controlului.
Microactuatori de tipul celor electromagnetici, electrostatici, piezoelectrici sau cei cu memoria formei, nu sunt compatibili direct cu cerintele acestor sisteme robotice.
Acestia produc fie un deplasament mic cu o forta puternica fie o forta puternica intr-un deplasament larg.
In continuare este prezentat modul de proiectare a unui microactuator modular, a carei proiectare incorporeaza fibre de SMA cuplate cu un mecanism de transmisie a cuplelor cu 2 grade de libertate si de asemenea un model termodinamic al fibrelor de SMA care ia in consideratie conditiile de lucru.
Acest model este util pentru proiectarea si de asemenea pentru a se atinge un control precis al miscarii si o forta de transmisie de o inalta acuratete.
2.6.1.Caracteristicile de proiectare.
2.6.1.1.Principiul de actionare SMA
Fibrele SMA au fost alese ca elemente active prin considerarea proprietatilor acestora foarte atractive cum ar fi presiunea de actionare foarte ridicata (pana la 250 Mpa pentru un fractional stroke de 8%), volumului mic si simplitatii procesului de actionare (obtinut printr-un efect Joule generat de o sursa de putere electrice)
Acesti actuatori prezinta insa dezavantaje majore:
-un comportament termo-mecanic neliniar cu histerezis
-sensibilitate puternica la mediul ambiant
-oboseala (imbatranire) ce reduce numarul de cicluri de actionare
-o forta bias este necesara pentru reconstituirea configuratiei initiale la temperatura joasa
-timp de raspuns lent, limitat de rata de racire a firului care depinde direct de diamtrul acestuia
Principiul de actionare
Proiectarea actuatorului SMA pentru un microgriper consta intr-o combinatie a doi actuatori SMA instalati pe legaturile unui mecanism special: unul dintre acestia comanda rotatia articulatiei si celalalt produce forta necesara pentru a manipula obiecte.
Actuatorii pentru gripere cu dexteritate ridicata trebuie sa produca un cuplu (torque) destul de larg pentru a compensa frecarea articulatiei, fortele de gravitatie si pentru a aplica fortele de prindere.
Microactuatorul combina in serie doua decuplari si actuatori adecvati. Unul conduce rotatia articulatiei si celalalt produce cuplul necesar pentru prindere. Structura sa compacta si de greutate mica poate fi integrata intr-o falanga a griperului (12mm lungime si 5mm diametru).
Fibrele de SMA sunt montate pe 2 elastic beams ale mecanismului dupa cum este prezentat in fig. 22.
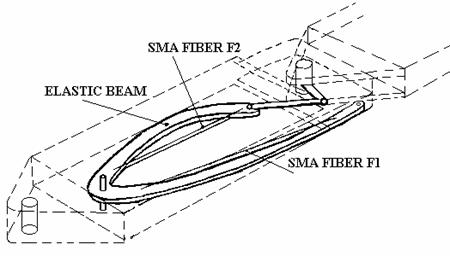
Fig. 22
Aceste elastic beams dau forta bias necesara pentru reconstituirea lungimei fibrei de SMA la temperatura scazuta. Amplitudinea contractiei firului de SMA, f1 este amplificata (marita) de mecanism pentru a se obtine cel putin o rotatie de 90 de grade ( forta de transmisie este suficient de mare pentru a balansa efectele frecarii si gravitatiei). Forta de prindere este produsa de fibra f2 pentru o pozitie data a articulatiei.
Actuatorul SMA
Din moment ce lungimea firului este aceeasi in ambele faze (austenite- temperatura ridicata- fibra SMA - comportament pur elastic si martensite- temperatura joasa- fibra SMA- comportament pseudo-plastic), cand nu exista stress extern, este necesara introducerea in proiectarea actuatorului a unui element activ sau pasiv pentru a produce forta bias.
Solutia aleasa in acest caz consta intr-o elastic beam preincarcata a carei actiune echivalenta este prezentata in fig 23
Fig. 23
unde F desemneaza forta externa, l lungimea nominala a firului in faza martensite , K este rigiditatea echivalenta a barii elastice si W incarcarea ce produce un stres initial W
Una din dificultatile de baza in proiectarea actuatorului este definirea parametrilor K, W si a diametrului fibrei astfel incat sa corespunda cu performantele dorite. Pentru aceasta, este necesar un model termo-mecanic al comportamentului fibrei de mare acuratete, care sa exprime stresul ca o functie de incordare (deplasament) (e) si de puterea electrica aplicata, care trebuie sa fie considerata ca variabila de control. Motivul este ca temperatura firului T (care constituie variabila naturala) este dificil de masurat fizic, in special, in cazul diametrelor mici si in plus este modificata de temperatura ambianta din vecinatatea firului (datorita efectului connection).
Daca consideram de asemenea ca rezistenta electrica a fibrei insasi depinde de temperatura si stres, este cu atat mai convenabil sa utilizam puterea electrica ca si variabila de comanda.
Diferite modele au fost propuse pentru descrierea efectului de memorie a formei, multe dintre ele avand numeroase limitari, in special, in proiectarea structurii de control, deoarece acestea folosesc T ca variabila. Acestea considera 2 scale diferite in observarea fenomenelor: una microscopica, cealalta macroscopica. Prima conduce la relatii complexe traducand legile fizice de baza si care nu sunt adaptate la proiectarea servo-sistemelor de control. Cea de-a doua forteaza proiectantul la o identificare experimentala in conditiile de lucru.
O
alternativa la aceste solutii este prezentarea unui model matematic
unidimensional care sa combine aceste doua nivele de observare pentru
utilizarea in proiectarea mecanica si a controlului. Acest model este limitat
la "efectul de memorie a formei pe o singura cale" (one way shape memory
effect). O parte a acestui model descrie relatia ![]() in timp ce cealalta parte da o
relatie intre puterea electrica si temperatura.
in timp ce cealalta parte da o
relatie intre puterea electrica si temperatura.
Eforturile recente ale oamenilor de stiinta se concentreaza si asupra reducerii dimensiuni si masei mecanismului articulatiilor si actionarilor robotice. Miniaturizarea motoarelor electromagnetice conventionale este insa limitata de resctrictiile de fabricatie. In general acest tip de motoare compromise viteva pentru cuplu utilizand angrenaje pentru reducerea vitezei, folosirea acestora adauga masa, volum si complexitate dupa cum reduc si sigurantei sistemului , din cauza cresterii numarului de componete ale acestuia.
Introducerea recenta a motoarelor rotative piezoelectrice ofera mecanisme de conducere potentiale pentru instrumente miniaturale. Motoarele ofera o densitate torque ridicata la viteze joase, o configuratie simpla, pot fi contruite in forma inelara (pentru aplicatii optice, electronic si pot avea un raspuns rapid. Deasemenea astfel de motoare pot fi dezvoltate pentru operatii in spatiu, funtionand efectiv si sigur la temperaturi sub nivele criogenice si vacumm.
Motoarele ultrasonice reprezinta o alternativa a pricipiului conventional al motorului electromagnetic. Acestea include un resonator stationar ce este excitat in vederea producerii unor oscilatii mecanice intr-un rang al frecventei ultrasonice, si un rotor pasiv. Capatul oscilator al rezonatorului conduce rotorul via unui contact de frecare.
Motoarele conventionale convertesc energia electrica in energie mecanica pe baza principiului elctromagnetic:firele conducand un curent electric intr-un camp magnetic experimeteaza o forta mecanica. Miscarea constanta este obtinuta prin tehnici de comutatie a curentului care produc o succesiune (corespondenta) a acestor efecte.
Motoarele ultrasonice pe de alta parte sunt bazate pe un principiul complet diferit: un rezonator mecanic este exictat electric pentru a produce oscilatii rezonante la frecvente ultrasonice; capatul osilatoriu al rezonatorului conducand un rotor pasiv via unui contact de frecare.
Un exeplu al unui astfel de motor ultrasonic dezvoltat in U.R.S.S. in anii 70 este prezentat in fig urmatoare. Montajul asimetric a rezonatorului oscilatoriu longitudinal conduce un rotor in forma de "toba" continuu intr-o singura directie. Frecventa oscilatorie ramane deasupra 20kHz, limita de perceptie a urechii umane. Vitezele rotorului de cateva sute de rpm pot fi atinse utilizand motoare ultrasonice, si totusi cu ochiul liber nu se poate percepe nici o miscare a capatului rezonator.Cateva calcule simple pot demonstra cum acest fapt poate fi posibil: amplitudinea miscarii capatului rezonator este de ordinul catorva microm, adica o singura perioada oscilatorie a rezonatorului poate conduce rotorul aproximativ 3 microm in jurul circumferintei sale. Acest proces este repetat la frecventa de 30kHz. Astfel v, viteza circumferentiala a rotorului este obtinuta din:
![]()
Vitezele rotorului notate deasupra sunt obtinute din rezultat pe bazele a unui diametru de rotor de 2 cm.
Fig.1 Principiul de operare a unui motor ultrasonic constand dintr-un resonator mecanic stationar si un rotor pasiv comandat prin contact de frecare
In ciuda fortei conducatoare intermitente, este posibila o rotatie constanta datorate momentului de inertie al rotorului.
Un principiu total diferit al motorului ultrasonic bazat pe flexural oscilations a unui annulus (inel) a fost dezvoltat in Japonia. Figura 2 prezinta oscilatiile naturale a unui inel (annulus) tipic utilizat aici, reprezentat in calculatia autorilor utilizand metoda elementului - finit.
Fig2. Oscilatii resonatoare intr-un motor ultrasonic inelar. Rotorul consta inele concentrice de dimensiuni identice in contact de frecare cu dintii superiori ai rezonatorului. Dintii maresc amplitudinea oscilatiei rezonatorului.
Cand doua din aceste oscilatii naturale sunt excitate sunt produse unde flexurale rotative, numite de autori "traveling waves". Aceste unde intorc un al doilea inel (annulus) plasat concentric pe rezonator, in jurul axei lor comune. Directia de rotatie a undelor flexurale poate fi inversat deci acest motor are doua directii de rotatie. Alte concepte de motor ultrasonic difera in modalitatea in care rezonatoarele oscileaza.
In cazul motoarelor ultrasonice, energia electrica este convertita in energie mecanica via efectului piezoelectric invers: un material piezoelectric supus unui camp electric se exinde respenctiv contracta in fuctie de orientarea campului la polarizarea piezoelectrica. Scimbarea periodica a formei datorate curentului alternativ cauzeaza excitatia oscilatiilor in rezonatorul mecanic. Materiale piezoelectrice utilizate pot fi ceramici lead-ziconate-titanate (PZT- ceramici). Acestea expun efect piezoelectric un mult mai mare decat materiale piezoelectrice naturale cum ar fi cuartul. Ceramicile PZT sunt fragile: oscilatori puri de ceramici PZT ar fi distruse de fortele restauratoare ridicate care insotesc oscilatiile. De aceea oscilatorii sunt construiti metal cu pizoceramici incorporate sau lipite (cimentate) in anumite puncte.
Motoarele ultrasonice recent dezvoltate sunt bazate pe oscilatiile unor rezonatoare optimizate tip "bagheta". In acest caz sunt demonstrate doua concepte ce pot fi aplicate : o conducere single-mod utilizand oscilatiile longitudinale ale "baghetei", si astfel o conducere bimodala bazata pe suprapunerea u unei oscilatii longitudinale si a uneia flexural.
3.2.1.Conducerea Single-Mode
Principiul single-mode este bazat pe oscilatia longitudinala a "baghetei" (fig3a) : nodurile oscilatiei rezonatorului si suportul actioneaza la centrul barei, in timp ce excursia maxima se produce la capetele acestuia. Un capat este presat asimetric impotriva unei "tobe" din otel. Pe durata expansiunii (miscarea primara A), capatul rezonatorului loveste "toba tare". Tipul retragere laterala (a doua miscare B) datorita pozitiei sale asimetrice, si acesta miscare este semnificativ amplificata de bevel pe capatul rezonatorului. O miscare se produce tangential cu rotorul care conduce motorul datorita contactului de frecare. Pe durata contractiei care urmeaza, contactul de frecare dintre rotor si rezonator se deschide si deformatia laterala a tipului revine elastic. Acest principiu de operare implica un 'lamda/2 rezonator' complet, montarea rezonatorului este oscilation-free, in contrast cu designul din fig 1.
Fig 3. Principiul de operare a unui motor ultrasonic utilizand un rezonator in forma de "bagheta". (a) Motor monomodal cu rezonator cu ocilatie longitudinala pura pentru o singura directie de rotatie. (b) Motor bimodal oscilatie longitudinala (A) si oscilatie flexural armonica (B) a rezonatorului (directie de rotatie reversibila)
3.2.1.1.Cresterea amplitudinii capatului rezonator
Pentru a obtine o date performante cu motoarele ultrasonice, este necesara o cea mai mare miscare posibila a capatului rezonator. Aceasta poate fi obtinuta prin ascutirea (conica) a resonatorului spre capatul acestuia. Aici, au fost discutate diferite forme ale descrierii analitice, cea mai cunoscuta fiind micsorarea sectionala in torma de T exponentiala sau Gaussiana.
Rezonatorul prezentat schematic in figura 4a a carui sectiune din dreapta consista dintr-o piesa ascutita, dintr-un material usor si relativ moale (ex. Aluminiul) s-a gasit ca optim preliminar. Sectiunea din stanga are o mai mare cross section si este contruita dintr-un material mai greu si mai dur (otel) decat sectiune din dreapta. O mai mare amplitudine a miscarii a capatului din dreapta fata de capatul din stanga poate fi observata din calcularea modelului elementului-finit bidimensional in fig 4b.Amplitudinea miscarii este amplificata intr-o maniera similara pentru oscialtii longitudinale si flexural.
Rezonatorul osciland longitudinal, bevelled in fata, este presat de arcuri impotriva unei tobe din otel de 2 cm in diametru cu o forta de aproximativ 20N.Acest principiu necesita ca toba sa fie mai tare decat rezonatorul. Rezonatoarele poseda frecvente naturale de aproxim 25kHz si sunt conduse printr-un voltaj alternativ de aproximativ 250Vrms. Un voltaj conducator mai scazut poate fi obtinu prin inlocuirea piezo-ceramicilor solide cu "piezo-teancuri" multi-stratificate..
Motoarele neincarcate ating viteze de 300 rpm si o eficienta de 35% atinsa la ragul de operare cel mai bun al motorului. In acest context, eficienta se refera la conversia semnalului energie de condus de 25 kHz in putere mecanica disponibila la tija. Eficinta electronici conducatoare care genereaza semnalul conducator de 25kHz de la sursa de voltaj (12V D.C. sau 220V A.C.) trebuie deasemenea sa fie luata in consideratie in aplicatiile reale.Cu electronici de conducere optimizate aceasta are o valoare de in jur de 90%.
a)
b)
c) d)
Fig4. Cresterea amplitudinei oscilatiilor la capatul rezonatorului. A)oscilatia longitudinala a rezonatorului. b) deplasarea asociata , c) armonic flexural , d)cursa asociata
Prin supraimpunerea a doua oscilatii cu componente ale miscarii ortogonale si reciproce (mutually), miscarea de rotatie a capatului rezonator este obtinuta direct. Un mode longitudinal si un mode armonic flexural ale "baghetei" sunt adecvate acestui scop. Modul logitudinal cauzeaza miscarea A dupa cum este prezentata in fig3b, si mode flexural cauzeaza miscarea B. Cand frecventele sunt intr-un raport integral, supraimpunerea rezulta in aproximativ miscarii rotative care pot fi utilizate pentru a conduce "rafinat" un rotor atasat. Nu este necesar un impact dur al rezonatorului impotriva rotorului pentru a genera retragerea laterala.
Ambele tipuri de oscilatie trebuie sa fie excitate independent. Oricum datorita deviatiilor rezonatorului real de la forma simetrica ideala, cele doua moduri de oscilatie sunt in fapt combinate. Comportamentul oscilatorilor mecanici cuplati este descris printr-un sistem a doua aranjamente spring-mass-pendulum cuplate printr-un arc aditional k3 (vezi fig 5a).
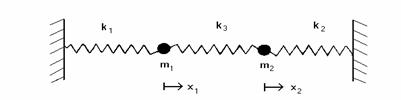
a)
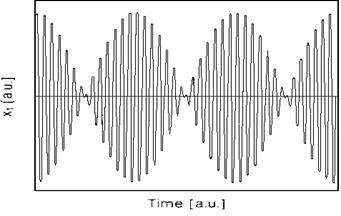
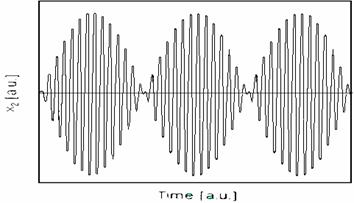
b)
Fig.5 a) modelul mecanic ce demonstreaza comportamentul modurilor de oscilare combinate.
Solutia ecuatiei miscarii pentru acest sistem indica faptul ca in cazul general sistemul cuplat va expune oscilatiile ritmate (de bataie) vezi fig 5b). Acesta nu poate fi utilizat pentru a construi un motor utrasonic bimodal.
Forma curbei miscarii este determinata unghiul de faza teta(vezi fig. 6).
Fig 6. Curbele miscarii capatului resonator al unui motor bimodal ca functii ale unghiului de faza dintre cele 2 oscilatii. Perioada contactului de comanda dintre rezonator si rotor este evidentiata.
Cand teta =0, o curba formata de tipul unui 8 orizontal este obtinuta. Sectiunea ingrosata a curbei indica timpul in care capatul rezonator este in contact de frecare cu rotorul. La unghiul de faza teta=0 in configuratia prezentata, rotorul se roteste in sens invers acelor de ceasornic, la viteza sa maxima de rotatie. Dupa cum teta creste, curba miscarii se schimba astfel incat devine putin favorabil pentru conducerea rotorului, adica, viteza este redusa (vezi curba pentru teta=pi/4). La teta=pi/2 momentul de conducere este redus la zero. Dupa cum teta creste in continuare, directia de rotatie este inversata. In acesta mod, unghiul de faza dintre doua oscilatii poate fi utilizat pentru a schimba directia de rotatie a rotorului, si a controla viteza.
Motoarele ultrasonice sunt blocate in starea off deoarece rezonatorul este presat pe rotor cu un arc. Pentru acest motiv, starea de operare teta=pi/2 (stationara) este de un interes particular (cf.fig7) este o stare de rotire libera, in care frecarea dintre rezonator si rotor este anulata de de oscilatia capatului rezonator.
Aceasta necesita un semnal de frecventa f0 si un semnal faza-cuplat de frecventa 2f0. Conducerea electrica a acestui motor poate fi simplificata: doua semnale de conducere faza-cuplate sunt adaugate electronic la voltaj scazut, aduse la energiile dorite via unui amplificator de putere si semnalul sumat este aplicat in paralel la toate piezoceramicilor (vezi diagrama bloc in fig 9). Diferenta mare in frecventa intre cele doua semnale inseamna ca doar piezoceramicile individuale reactioneaza la componentele sectrale corespunzatoare.
Fig 7. Diagrama bloc de conducere electrica a motorului bimodal
Conducerea electrica a motorului apoi necesita un amplificator de putere electrica (scump). Motoarele cu rezonator in forma de annulus si cu directie de rotatie reversibila discutate mai devreme trebuie sa fie conduse prin doua semnale de aceeasi frecventa dar de faze diferite, adica in acest caz sunt necesare doua aplificatoare de putere.
Implementarea conducerii bimodale rezultata in primul motor ultrasonic cu directie reversibila de rotatie ca poate fi controlata printr-un singur semnal de faza. Acest fapt este important in termeni economici, luand in calcul costul relativ ridicat a electronicilor de putere.
Cand motoarele sunt in functiune trebuie luat in consideratie faptul ca frecventele naturale ale rezonatorului se pot schimba lent din cauza efectulor de incalzire, abrasion in contactul de frecare sau sub diferite conditii de incarcare. Aceasta poate fi compensata atasarea unei extra piese de piezoceramica care detecteaza starea de oscilatie actuala a rezonatorului si trimite un semnal pentru controlul sine-wave generatoarelor.
3.3.Motoare rotative ultrasonice actionate prin unde flexurale
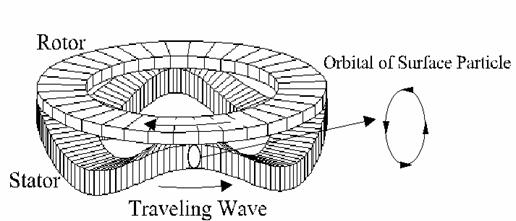
In figura
1 este prezentat ca un exemplu, principiul de operare al unui motor ultrasonic
(motor de tip inel cu unde flexurale calatoare). O unda calatoare este
stabilita peste suprafata statorului, care se comporta ca un inel elastic, si
produce o miscare eliptica la interfata cu rotorul. Aceasta miscare eliptica a
suprafetei de contact impinge rotorul si tija de conducere care este cuplata la
acesta. Dintii care sunt atasati la stator, tind sa creasca momentul bratului
pentru a amplifica viteza.
Fig 8 Principiul de operare a motorului
Operarea USM-ului depinde de frecarea la interfata dintre rotorul si statorul miscator, care este o problema cheie in proiectarea acestei interfete pentru un timp de viata extins.
3.3.1.Principiul operarii
Principiul general de operare a motoarelor ultrasonice este de a genera miscarea mecanica totala (groaie) dintre amplificare si repetarea micro-deformatiilor materialelor active. Materialul activ introduce o miscare orbitala a statorului la punctele de contact cu rotorul si interfata de frecare dintre rotor si stator rectifica micro-miscarea pentru a produce macro-miscarea statorului. Acest mecanism este ilustrat in figura 1. Materialul activ, care este un material piezoelectric, excita o unda flexurala calatoare din interiorul statorului care conduce la miscarea eliptica a particulelor suprafetei. Dintii sunt utilizati pentru a intensifica viteza, care asociata cu efectul de impingere a acestor particule. Rectificarea micro-miscarii, o interfata este furnizata prin presarea rotorului in partea de sus a statorului si forta de frecare dintre 2 cauze care fac ca rotorul sa se roteasca. Acest transfer de miscare opereaza ca un angrenaj (mecanism) si conduce la o viteza de rotatie mult mai scazuta decat frecventa undei.
Se presupune ca un substrat al statorului are o grosimea, tS, cu un set de cristale piezoelectrice care sunt inlantuite in partea din spate a statorului intr-o forma data secventa si localizare (poling). Grosimea cristalelor piezoelectrice este tp. Inaltimea totala, h, este suma grosimii cristalelor si cea a statorului (stratul de inlantuire este neglijat). Inaltimea globala undei calatoare, directia (polin) a cristalelor piezoelectrice este structurata astfel incat sfarsitul de faza este format din sfertul lungimii undei. Aceasta forma (poling) intentioneaza de asemenea sa elimine extensia din stator si sa maximizeze curbatura. Dintii sunt aranjati pe stator intr-un inel la pozitie radiala.
Pentru a genera unda
calatoare in interiorul statorului sunt activate simultan 2 moduri ortogonale.
Aceste moduri sunt determinate prin construirea sistemelor de actionare
piezoelectrice intr-o forma de 2 sectiuni (poling) care sunt legate la stator.
Examinarea geometrica a acestei forme arata ca conducerea celor 2 sectiuni
utilizand semnalele ![]() si
si ![]() , va produce o unda calatoare cu o frecventa de
, va produce o unda calatoare cu o frecventa de ![]() . De asemenea, prin schimbarea semnului unuia din
semnalele de conducere, unda calatoare se va opune directiei lui.
. De asemenea, prin schimbarea semnului unuia din
semnalele de conducere, unda calatoare se va opune directiei lui.
3.3.2. Modelarea teoretica
Ecuatia de miscare a motorului ultrasonic poate fi obtinuta din principiul lui Hamilton. Modelul analitic a fost obtinut de mai multi autori. Ecuatia generala de miscare a statorului poate fi rezumata ca

unde [M], [C], [K], [P], [G], sunt matricile masei, umiditatii, rigiditatii, cuplului electromecanic si respectiv, capacitatii. Vectorii , , , si sunt amplitudinea modelului, vectorii potentialului electric , fortele externe normale, fortele externe tangentiale si respectiv,vectorii de atac (charge). Amplitudinea modelului si alte coordonate generalizate pot fi definite prin intermediul metodelor energiei, cum ar fi metoda Rayleigh Ritz. Oricum, acesta metoda pateaza contributia (teeth) si variatia inelului statorului, precum si, discul de suport de-a lungul directiei radiale si poate conduce la rezultate nedorite. In aceeasi maniera (la fel), metoda elementelui finit 3-D (FEM) a fost relatata sa fie utilizata pentru a prezice corect frecventele modale si raspunsul tranzitoriu al statorului, fiind un proces intensiv de calcul. Mai departe, modurile raspunsului calculat si frecventele asociate, care sunt determinate prin FEM 3-d, trebuie sa fie identificate vizual pentru a gasi modul de proiectare. Datorita dezavantajelor metodelor mentionate mai sus, se utilizeaza elementul finit inelar modificat si el se bazeaza pe caracteristicile de simetrie a motoarelor ultrasonice. Elementul finit annual este prezentat in figura 2 ,
unde w1, w2, , si sunt grade de libertate.
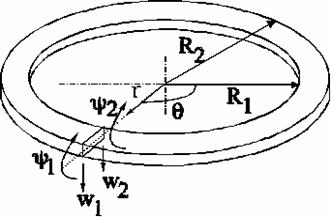
Fig.9 Un element finit inelar
Deplasarea transversala w peste fiecare element este presupusa a fi de forma data de ecuatia:
3.4.Motor ultrasonic utilizand fluid electro-rheologic si vibratie torsionata
Rotorul motorului ultrasonic este in contact cu statorul si este condus printr-o vibratie piezoelectrica de frecventa inalta, care contine 2 componente. Forta de frecare la suprafata de contact este schimbata periodic prin vibratia normala la suprafata astfel incat vibratia tangentiala poate fi rectificata pentru a conduce rotorul. Acest mecanism este realizat printr-o miscare elicoidala la suprafata a statorului intr-un motor ultrasonic de tip unda transportoare (travelling), si printr-o vibratie compusa intr-un motor ultrasonic de tip traductor hibrid. Viata si eficienta motorului depind mult de mecanismul vibratiei normale care controleaza forta de frecare, deoarece vibratiile piezoelectrice au o viata lunga si o eficienta extrem de mare. In acesta lucrare, se prezinta un mecanism nou pentru a controla tractiunea prin introducerea fluidului electroreologic (ERF) intre rotor si stator. ERF este un fluid cu functie speciala, a carui vascozitate sau (shear stress) pot fi in mare masura controlate prin campul electric aplicat. Actiunea ("one-way clutch" (prindere)) a tensiunii controlata de ERF substituie functia componentei vibratiei normale in motoarele ultrasonice conventionale.
3.4.1.Principii
In figura 10 este prezentata structura de baza si principiu de operare al motorului.
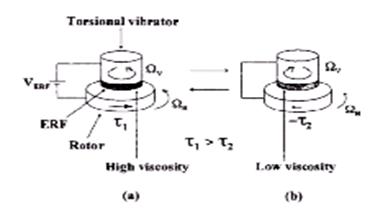
Fig.10 Constructia si principiul de operare a motorului ultrasonic
O vibrator torsional este atasat la un rotor printr-un
gol ingust care este umplut cu fluid electrorheologic (ERF). Vascozitatea
ERF-ului poate fi schimbata prin campul electric. Daca tensiunea aplicata la
gol este modificicata on si off sincron cu vibratia torsionata a statorului,
forta de rotatie este transmisa la rotor numai pentru jumatate de ciclu a
vibratiei. In
acest fel, vibratia torsionata este convertita in revolutia rotorului prin
actiunea ("one-way clutch") a tensiunii controlate de ERF. Daca schimbam
(timing) aplicarii tensiunii la ERF prin 180o, atunci directia
revolutiei este rezervata. In acesta figura, o perioada a vibratiei este
impartita in 2 faze. La faza (a), atunci cand viteza vibratiei ![]() este mare, un camp electric VERF este aplicat la gol
(gap) pentru a avea vascozitatea ERF-ului mare. Rotorul este apoi condus
print-un cuplu mare
este mare, un camp electric VERF este aplicat la gol
(gap) pentru a avea vascozitatea ERF-ului mare. Rotorul este apoi condus
print-un cuplu mare ![]() . La faza (b), atunci cand directia vitezei vibratiei este in sens opus
celei rotirii rotorului
. La faza (b), atunci cand directia vitezei vibratiei este in sens opus
celei rotirii rotorului ![]() , tensiunea este redusa pentru a face ca vascozitatea ERF-ului sa fie mica.
La acesta faza functioneaza numai un cuplu (torque) rezistiv mic
, tensiunea este redusa pentru a face ca vascozitatea ERF-ului sa fie mica.
La acesta faza functioneaza numai un cuplu (torque) rezistiv mic ![]() pe rotor.
pe rotor.
3.4.2.Configuratia motorului prototip
Configuratia motorului realizat ca prototip este prezentata in figura 11.
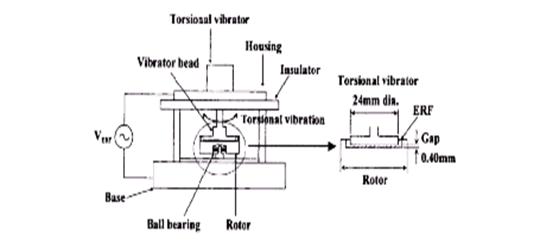
Fig 11 Configuratia motorului
Un rotor este montat pe o legatura de tip minge astfel incat acesta se poate roti liber. Iesirea finala a vibratiei torsionale (faces) rotorul printr-un gol (gap) umplut cu ERF. Diametru rotorului si latimea golului (gap) este 24 mm si respectiv 0.4 mm. In motorul prototip, vibratia torsionata este excitata electromagnetic. Noi utilizam ERF-ul produs de Bridgestone Co, Ltd a carui vascozitate aparenta poate fi schimbata de la 20 la 400 Pa s prin varierea campului electric de la 0 la 3.5 kV mm-1. Frecventa maxima de raspuns a ERF-ului este in jur de 100 Hz.
3.4.3.Caracteristici
In primul rand, formele undelor vitezei vibratiei torsionate, tensiunea aplicata ERF-ului si viteza unghiulara a rotorului au fost observate printr-un vitezometru Dopller cu laser, asa cum se poate vedea in figura. Aici, s-a utilizat o viteza a vibratiei dreptunghiulara, deoarece ea a fost excitata usor printr-un motor electromagnetic. Frecventa uzuala a vibratiei a fost restrictionata sub 100 Hz, datorita timpului de raspuns mare a ERF-ului. Tensiunea aplicata ERf-ului a fost de asemenea dreptunghiulara si in faza cu viteza vibratiei.
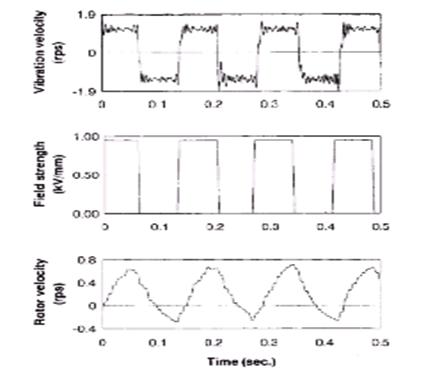
Putem confirma ca rotorul se invarte intr-o directie, daca viteza de unduire este mediata (averaged) in raport cu timpul. In acest prototip, efectul (flywheel) a rotorului nu a fost de ajuns, deoarece momentul de inertie a fost prea mic in comparatie cu frecventa de conducere. Amplitudunea fluctuatiei in revolutia rotorului a fost mare.
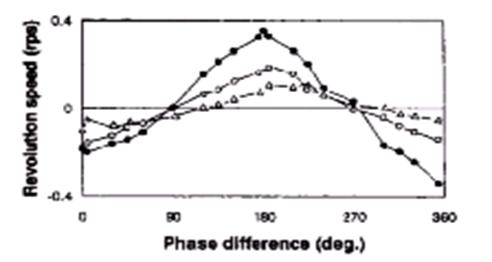
Apoi,difenta de faza intre viteza
vibratiei torsionate si tensiunea aplicata (gap) a fost schimbata, asa cum se
poate vedea in figura .
Se poate confirma ca directia revolutiei poate fi modificata cu succes daca diferenta de faza a fost schimbata la 180o. Daca frecventa de conducere a fost crescuta, viteza maxima revolutiei a fost redusa, si pozitia varfurilor a fost schimbata. Acestea sunt atribuite raspunsului tranzitoriu a ERF-ului..
3.5.Motor ultrasonic in forma de bara pentru miscare cu grade de libertate multiple
Nevoia unor actuatori care sa genereze miscari precise cu un ridicat grad de dexteritate costituie un scop imperativ in domeniul mecanic, electronic si in ingineria medicala. In acelasi timp in proiectarea unui astfel de actuator, capabil sa genereze miscari cu grade multiple de libertate sunt luate in consideratie volumul si greutatea. Volumul total si greutatea unui motor electromagnetic in general este marit din cauza angrenajelor complicate utilizate pentru reducerea vitezei de rotatie care trebuie sa fie conectate cu axele de iesire. In plus, astfel de motoare necesita putere electrica chiar daca viteza de rotatie este zero pentru a genera holding torque. Si cel mai important, numar total de motoare necesar este egal cu numarul gradelor de libertate ale miscarii. S-au propus astfel diferite variante care sa solutioneze aceste probleme.
In particular caracteristicile motoarelor ultrasonice ca: cuplu ridicat la viteza rotationala scazuta, faptul ca nu necesita agrenaje pentru reducerea vitezei de rotatie si cuplul stationar ridicat care nu necesita putere electica pentru a fi mentinut fac aceste motoare sa fie adecvate actionarii cu grade de libertate multiple. In plus aceste motoare ofera avantajele silentiozitatii, simplitatii proiectarii absentei undelor electromagnetice si controlabilitatii ridicate.
In continuare este prezentat un exemplu de motor ultrasonic cu trei grade de libertate ce utilizeaza un stator in forma de bara, constructia sa fiind posibila prin corespondenta a trei frecvente naturale al statorului bara. Cand doua dintre aceste vibratii naturale, 2 beding modes si un longitudinal mode, au o diferenta de faza de 90 de grade, rotorul sferic in contact cu capul statorului se roteste in jurul a trei axe perpendiculare.
Motoarele ultrasonice anterioare sunt motoare conduse prin frecare in care doua vibratii naturale ale statorului sunt excitate la o diferenta de faza de 90 de grade. Aceste motoare ultrasonice sunt de doua tipuri: tipul traveling wave unde sunt utilizate doua vibratii naturale similare si tipul standing wave unde sunt utilizate doua vibratii naturale diferite. La motoarele ultrasonice anterioare cu o miscare de rotatie cu un singur grad de libertate punctele de pe suprafata statorului se rotesc intr-un locus oval cand cele doua frecvente naturale ale statorului corespund. Rotorul in contact punctul de pe suprafata statorului este comandat prin forta de frecare. In comparatie cu acest principiu de comanda in cazul comenzii pentru o miscare cu trei grade de libertate proiectarea statorului trebuie sa raspunda urmatoarelor cerinte:
frecventele celor trei vibratii naturale sa corespunda
directiile de vibrare a unui punct de pe stator pentru cele trei vibratii naturale sunt perpendiculare una pe cealalta, astfel incat planele miscarii celor trei locusi sunt perpendiculare unul pe celalalt
structura statorului este simpla si poate fi asamblata cu usurinta si de dimensiuni mici
cele trei vibratii naturale sunt simple, de ordin scazut si au frecvente scazute, astfel incat vibratii care nu sunt necesare nu sunt excitate.
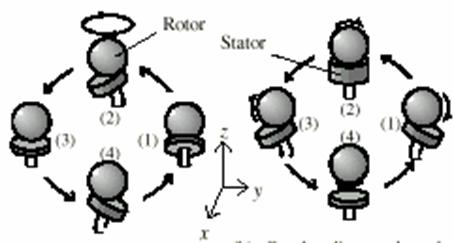
Pentru a satisface
aceste cerinte se poate alege utilizarea unui stator cu o geometrie in forma de
bara. Modurile vibratiei naturale ale statorului excitat sunt 2 moduri bending
(indoire,curbare) secundare si un mode longitudinal primar.
Figura 12 prezinta principiul de comanda a motorului ultrasonic in forma de bara.
a)2 moduri de curbare b)un mod de curbare si
un mod longitudinal
Fig.12
Cand 2 moduri bending (1)(3) si (2)(4) sunt excitate la o diferenta de faza de 90 de grade, un rotor sferic se roteste in jurul axei Z dupa cum este prezentat in fig a).
Cand un mod bending (1)(3) si un mod longitudinal (2)(4) sunt excitate la o diferenta de faza de 90 de grade, un rotor sferic se roteste in jurul axei X, ca in fig b).
Acest motor ultrasonic in forma de bara este un motor hibrid, care se comporta ca un motor cu traveling wave cand sunt utilizate cele 2 moduri bending si ca un motor standing wave cand sunt utilizate un mod bending si unul longitudinal. Rotorul sferic poate fi rotit in jurul oricarei axe prin combinarea celor trei vibratii naturale.
Fig 13 prezinta structura unui motor ultrasonic in forma de bara pentru grade de libertate multiple. Caratersitcile structurii fiind urmatoarele.
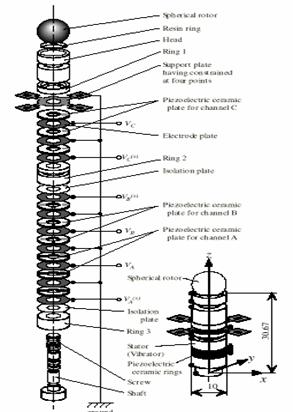
In ceea ce priveste
locatia ceramicilor piezoelectrice trei straturi de foite de ceramica
piezoelectrica (PZT), doua dintre acestea sunt pentru modurile bending si un
altul este pentru modul longitudinal, sunt localizate intre blocuri de metal.
Fiecare strat are trei foite de PZT, doua dintre ele excita vibratia naturala
si al treilea detecteaza vibratia.
Fig.13
Fiecare vibratie naturala este excitata cand este aplicat un voltaj de intrare pe electrod pentru care frecventa aproximativ aceeasi cu frecventele naturale bending/longitudinala.
Figura 14 prezinta modurile naturale calculate ale statorului si corespondenta distributie normala de strain, indicand pozitia PZT ce se utilizeaza pentru a excita fiecare vibratie naturala. Prin plasarea unui strat de PZT unde strain este ridicat, pot fi excitate cu o eficienta ridicata vibratiile naturale dorite.
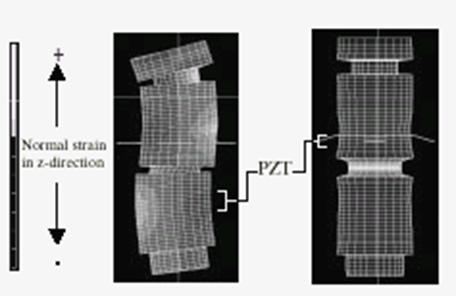
Fig.14
In ceea ce priveste restrictiile asupra geometriei exista anumite parti in forma de inel ce prezinta constrangeri. Aceste restirctii rezulta intr-o rigiditate scazuta; de aceea amplitudinea vibratiilor naturale este extinsa si frecventele naturale sunt scazute. De obicei, restictia localizata unde strain este mare large micsoreaza frecventa naturala din cauza faptului ca rigiditatea pentru mod devine scazuta. Fig 3 prezinta distributia de strain normal pe directia axei Z insotita de modurile naturale. Strainul este gasit a fi large la o restrictie localizata in apropierea varfului statorului in fig 3 (a), ceea ce inseamna ca restrictia este efectiv pentru al doilea modul indoire al statorului. Oricum, daca o restrictie este plasata aproape de mijlocul statorului din Figura 3 (b), deplasamentul este mare, ceea ce inseamna ca aceasta restrictia este efectiva pentru primul mod longitudinal al statorului. Restrictia plasata in cap face ca frecventa naturala a celui de-al doilea mod de unduire a statorului sa fie mica, iar constrangerile in inel 1/inel 2 face ca frecventa naturala a primului mod longitudinal al statorului sa fie mica. Frecventele naturale ale modurilor de indoire/longitudinal sunt facute pentru a corespunde schimbarii geometriei constriction mai sus mentionate.
In momentul comandarii motoarele ultrasonice trebuie sa se adauge intre stator si rotor o sarcina axiala. Un magnet, care are un diametru de 3 mm si o grosime de 1 mm, este plasat pe capul statorului pentru a putea adauga o sarcina normala intre stator si rotorul sferic. Atunci cand spatiul dintre magnet rotorul sferic este aproximativ 0.1 mm, sarcina este in jur de 0.7 (N). Amplitudinea sarcinii depinde de acest spatiu.
O foaie metalica cross-shaped este plasata in sectiunea din mijloc a statorului pentru mentine constrans statorul cu cele 4 terminale ale lui. Pozitia foaiei metalice este determinata utilizand analiza elementului finit astfel incat influenta constrangerii la vibratii naturale sa fie mica.
|
