Reactorul cu amestecare perfecta continuu prezinta câteva particularitati interesante din punct de vedere al comportarii nestationare, generate de complexitatea interactiunilor între fenomenele fizico-chimice ce stau la baza procesului, neliniaritatea accentuata a dependentelor între variabile, proprietatea de a prezenta stari stationare multiple cu stabilitati diferite etc.
Pentru a ilustra câteva din aceste particularitati, se considera cazul, mai simplu, al reactiei singulare de transformare a unui singur reactant, A, în faza lichida, la presiune constanta, proces caracterizat de urmatoarele variable (fig. 16):
- variabile independente:debitul de alimentare (Dv0), concentratia reactantului A în alimentare (CA0), temperatura de alimentare (T0), debitul de agent termic (Tai);
- variabilele de stare, identice cu cele de iesire: concentratia reactantului A în amestecul de reactie (CA) si temperatura de reactie (T).
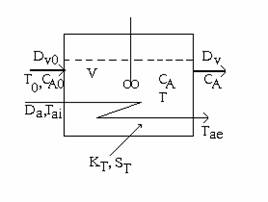
Fig. 16 Reactorul cu amestecare perfecta continuu
Modelul matematic al reactorului consta din ecuatiile de bilant masic al reactantului A si cea de bilant al energiilor . Ecuatia de bilant masic al reactantului A este de forma:
![]() (163)
(163)
vRA - viteza de transformare a reactantului A; V - volumul amestecului de reactie, care .variaza în timp daca apar diferente între debitele de intrare (Dv0) si respectiv iesire (Dv):
![]() (164)
(164)
Din (163) si (164) se obtine legea de variatie în timp a concentratiei CA:
![]() (165)
(165)
Variatia în
timp a temperaturii amestecului de reactie se obtine plecând de la
bilantul energiilor pe volumul de reactie. Pe un interval de timp, ![]() (Dt infinit mic),
acesta este exprimat prin ecuatia:
(Dt infinit mic),
acesta este exprimat prin ecuatia:
 (166)
(166)
Cei opt termeni din ecuatia (166) au urmatoarele semnificatii:
si (5) - energia interna totala a amestecului de reactie la momentele t si respectiv t+Dt;
si (6) - lucrul mecanic efectuat din exterior asupra mediului de reactie pentru alimentarea reactantilor, respectiv lucrul efectuat de catre mediul de reactie asupra mediului exterior pentru evacuarea produsilor;
si (7) - energia interna introdusa în sistem cu amestecul de reactanti si respectiv energia interna evacuata din sistem cu amestecul de produsi;
- energia termica transferata din exterior catre amestecul de reactie prin peretii separatori;
(8) - lucrul mecanic efectuat de catre sistem asupra mediului exterior, urmare a variatiei volumului amestecului, DV;
Notatii utilizate:
u - energia interna a amestecului de reactie; UM - energia interna molara; DM0, DM - debite molare de amestec alimentat si respectiv evacuat; VM0, VM - volume molare pentru amestecurile alimentat si respectiv evacuat; QT - debit de caldura transferata; p0, p - presiunea de alimentare, respectiv evacuare.
Din (166) dupa rearanjarea termenilor, simplificare prin Dt si trecere la limita (Dt 0) se obtine:
![]() (167)
(167)
Ţinând seama de definitia entalpiei:
![]() (168)
(168)
ecuatia (167) se transcrie în forma ce reprezinta bilantul entalpiei:
![]() (169)
(169)
Entalpia amestecului de reactie are expresia:
![]() (170)
(170)
nj - cantitatea de specie j în amestec, (kmoli); HMj - entalpia molara a speciei j; s - numarul de specii chimice (componenti) din amestec.
Din (170):
![]() (171)
(171)
Procesul fiind presupus la presiune constanta:
![]() (172)
(172)
Cpj - caldura molara a speciei J.
Pe de alta parte acumularea de specie J în amestecul de reactie se obtine din ecuatia de bilant masic:
![]() (173)
(173)
Din (171), (172) si (173) rezulta:
![]() (174)
(174)
În ecuatia (174) se pot face înlocuirile:
![]() ;
; ![]() si
si ![]() (175)
(175)
Cu aceste înlocuiri, din (174)
si (169), tinând seama ca ![]() , rezulta:
, rezulta:
![]() (176)
(176)
În ecuatia astfel obtinuta se pot introduce în continuare substitutiile :
![]() ;
; ![]()
![]() - caldura molara medie, pe intervalul [To
, T].; cp - caldura specifica medie a amestecului ;
- caldura molara medie, pe intervalul [To
, T].; cp - caldura specifica medie a amestecului ;
m - masa amestecului de reactie.
Cu aceste substitutii, ecuatia (175) devine:
![]() (177)
(177)
Uneori capacitatea calorica a amestecului se exprima în functie de debitul masic si caldura specifica medie a amestecului:
![]() (178)
(178)
iar caldura generata pe unitatea de volum, în functie de variatia de entalpie raportata la unitatea de masa de reactant de referinta (A) transformat:
![]() (179)
(179)
Debitul de caldura transferat dinspre agentul termic catre amestecul de reactie, are expresia:
![]() (180)
(180)
Diferenta medie de temperatura între agentul termic si amestecul de reactie se poate exprima printr-o medie aritmetica a diferentelor de temperatura la intrare si respectiv iesire:
![]() (181)
(181)
sau printr-o formula de mediere geometrica:
 (182)
(182)
La diferente de temperatura relativ mici între intrarea si iesirea agentului termic, se utilizeaza de regula medierea aritmetica. În aceasta varianta, ecuatia (177) devine:
![]() (183)
(183)
Uneori se prefera exprimarea debitului de caldura transferata în functie de debitul de agent termic, acesta fiind folosit frecvent ca variabila de comanda pentru reglarea temperaturii de reactie. În acest scop, se scrie o ecuatie de bilant termic pentru spatiul de circulatie a agentului termic. Cea mai simpla exprimare corespunde situatiei în care capacitatea calorica a peretelui separator între mediul de reactie si agentul termic este neglijabila (se poate aproxima ca transferul termic are loc instantaneu între cele doua fluide). Presupunând, în plus, ca nu au loc pierderi semnificative de caldura si nici schimbari de stare de agregare, bilantul de caldura pe spatiul de circulatie a agentului termic este exprimat prin ecuatia:
![]() (184)
(184)
Exprimând diferenta medie de temperatura prin relatia (181), se ajunge la relatia:
 (185)
(185)
Daca se utilizeaza formula de mediere logaritmica (182):
 (186)
(186)
Din aceasta relatie se poate scrie:
![]() ;
; ![]() (187)
(187)
Expresia debitului de caldura transferata devine:
 (188)
(188)
Evolutiile în timp ale concentratiei reactantului de referinta si temperaturii de reactie, se obtin prin integrarea sistemului format din ecuatiile de bilant masic (165) si bilant termic (183). De mentionat faptul ca ecuatia (183) este valabila atât pentru procese exoterme cât si pentru procese endoterme. În continuare, din punct de vedere al transformarii chimice, se trateaza situatia cea mai simpla, în care evolutia compozitiei se poate exprima în raport cu concentratia CA, ca singura variabila. Atunci când transformarea chimica are loc între doi sau mai multi reactanti, sau atunci când în sistem au loc reactii multiple, sunt necesare, de regula, mai multe ecuatii de bilant masic, de forma (165).
Calculul starii stationare a reactorului cu amestecare perfecta
În regim stationar, ecuatiile (165) si (183) se particularizeaza în forma sistemului:
![]() (189)
(189)
![]() (190)
(190)
din care se obtin, prin rezolvare, valorile de regim stationar, CAS si Ts, ale concentratiei si respectiv temperaturii. Rezolvarea poate fi efectuata printr-o metoda numerica (Newton Raphson etc), însa se poate utiliza de asemenea o metoda geometrica, ce prezinta avantajul unui plus de informatii legate de natura starii stationare. Pentru ilustrarea metodei geometrice, ecuatia (190) se transcrie în forma echivalenta, specifica proceselor exoterme:
![]() (191)
(191)
ce reprezinta conditia de egalitate între debitul de caldura generata în reactia chimica (qG) si suma (qT) a debitelor de caldura consumata pentru încalzirea reactantilor de la temperatura de alimentare la temperatura de reactie si respectiv transferata catre agentul termic:
![]() (193)
(193)
![]() (194)
(194)
Urmare a slabei
dependente în raport cu temperatura a caldurii specifice a
amestecului de reactie (cp) si a coeficientului total de
transfer termic (KT) functia ![]() se poate aproxima
liniara în raport cu Ts. spre deosebire de functia qG
care este puternic neliniara. O expresie de calcul mai convenabila
pentru qG(Ts) se obtine din ecuatia de
bilant masic (189):
se poate aproxima
liniara în raport cu Ts. spre deosebire de functia qG
care este puternic neliniara. O expresie de calcul mai convenabila
pentru qG(Ts) se obtine din ecuatia de
bilant masic (189):
![]() (195)
(195)
XAs - conversia reactantului A la starea de regim stationar.
Dependenta de temperatura qG(Ts) este influentata în mod determinant de dependenta XAs(Ts), deductibila din ecuatia de bilant masic (189).
Pentru o reactie
reversibila de ordinul I: ![]() ;
; ![]() ; ( CP0=0).
; ( CP0=0).
Înlocuind în (189 si (195) rezulta:
![]() (196)
(196)
![]() (197)
(197)
pentru o reactie ireversibila de ordinul I (vRA=k CA), se obtine în mod similar:
![]() (198)
(198)
Solutia
ecuatiei (192) se obtine reprezentând grafic în diagrama q-Ts,
functiile (194) si (197). Functia ![]() se reprezinta
grafic printr-o dreapta. Cum se observa din figura 17, în raport cu
pozitia dreptei
se reprezinta
grafic printr-o dreapta. Cum se observa din figura 17, în raport cu
pozitia dreptei ![]() , pot apare între 1 si 3 solutii ale ecuatiei
(192). În consecinta, reactorul poate prezenta între 1 si 3
stari stationare (la aceleasi valori ale variabilelor
independente Dv0, CA0, T0, Tai, Da
si V). Proprietatea este denumita multiplicitate
a starilor stationare.
, pot apare între 1 si 3 solutii ale ecuatiei
(192). În consecinta, reactorul poate prezenta între 1 si 3
stari stationare (la aceleasi valori ale variabilelor
independente Dv0, CA0, T0, Tai, Da
si V). Proprietatea este denumita multiplicitate
a starilor stationare.
exoterma reversibila exoterma ireversibila
În cazul reactiilor singulare, starea amestecului de reactie este complet caracterizata prin valorile conversiei reactantului de referinta si temperaturii de lucru. O stare stationara definita printr-o pereche de valori (XAs, Ts) ale conversiei si temperaturii, este reprezentabila în planul XA-T printr-un punct, denumit punct de functionare stationara. Mentinerea functionarii reactorului într-un astfel de punct este conditionata de mentinerea la valorile constante, corespunzatoare acestuia, a tuturor marimilor independente. Operarea în conditii de lucru industriale este caracterizata de variatii aleatoare (denumite perturbatii) ale marimilor independente (Dv0, CA0, T0, Tai etc) care au ca efect deplasarea reactorului din punctul de functionare stationara. Se disting perturbatii temporare (la care modificarea are o durata limitata, fiind urmata de revenirea la valoarea de regim stationar) si perturbatii permanente (la care modificarea persista în timp).
Un punct de functionare stationara este stabil, daca în urma actiunii unei perturbatii temporare sistemul de reactie revine în mod autonom (fara nici o actiune de reglare) în acel punct. În caz contrar, punctul de functionare stationara este instabil. În figura 18 este reprezentata diagrama pentru cazul reactiei ireversibile exoterme, cu trei stari stationare ce corespund temperaturilor TM, TN si TP. Punctele de regim stationar corespunzatoare temperaturilor TM si TP sunt stabile, întrucât
![]()
 Fig.
18 Analiza stabilitatii în
diagrama q-T
Fig.
18 Analiza stabilitatii în
diagrama q-T
la modificari pozitive ale temperaturii sistemul de reactie ajunge în zona în care qT>qG, de unde, dupa disparitia perturbatiei, se revine, prin racire, în punctul de plecare. În mod analog, la modificari negative ale temperaturii (racire), sistemul ajunge în zona în care qG>qT, din care, dupa disparitia perturbatiei, revine prin încalzire în punctul stationar. Starea intermediara de temperatura TN, neîndeplinind aceste conditii, este o stare stationara instabila.
Din
diagrama se constata ca în punctele ce corespund starilor
stationare stabile, M si P, panta caldurii generate este mai
mica decât panta caldurii transferate ![]() în timp ce în
punctul intermediar N, ce reprezinta o stare instabila, situatia
este inversa,
în timp ce în
punctul intermediar N, ce reprezinta o stare instabila, situatia
este inversa, ![]()
Aceste inegalitati, pot servi drept criterii pentru verificarea directa a stabilitatii unei stari stationare , S, cele doua debite de caldura, qG si qT se pot aproxima prin relatiile:
 ;
;  (199)
(199)
din care tinând seama ca ![]() , rezulta:
, rezulta:
 (200)
(200)
Din (200) rezulta urmatoarele:
a)
La abateri ![]() (racire în raport cu starea stationara)
sistemul de reactie revine prin încalzire în punctul stationar
(qG>qT)
daca
(racire în raport cu starea stationara)
sistemul de reactie revine prin încalzire în punctul stationar
(qG>qT)
daca  (201)
(201)
b)
Daca ![]() (încalzire în raport cu starea stationara)
sistemul de reactie revine de asemenea, prin racire(qG<qT),
în punctul stationar, daca relatia (201) este îndeplinita.
(încalzire în raport cu starea stationara)
sistemul de reactie revine de asemenea, prin racire(qG<qT),
în punctul stationar, daca relatia (201) este îndeplinita.
Inegalitatea (201) este o conditie necesara de stabilitate a starii stationare, însa nu si suficienta.
În cazul reactiilor singulare inegalitatea (201) se poate aduce la o forma explicita în raport cu marimile ce caracterizeaza procesul. Neglijând dependenta de temperatura a proprietatilor fizice ale sistemului de reactie, se obtin expresiile:
![]() (202)
(202)
unde
![]() (203)
(203)
Din ecuatia de bilant masic al reactantului A în regim stationar:
![]() (204)
(204)
![]() sau
sau ![]() (205)
(205)
Din (203) si (205) rezulta:
 (206)
(206)
Înlocuind în (202):
 (207)
(207)
Pe de alta parte din (194) rezulta:
![]() (208)
(208)
Înlocuind (207) si (208) în (201) rezulta inegalitatea echivalenta:
 ; (209)
; (209)
unde 
Studiul pe cale analitica a stabilitatii starii stationare a reactorului
cu amestecare perfecta
Aplicarea metodei grafice descrisa mai sus presupune constructia în prealabil a diagramei q-T, ceea ce constituie un dezavantaj al acesteia. De asemenea utilizarea inegalitatii (209) este limitata la reactii singulare. Metode mai generale si mai directe de studiu al stabilitatii starii stationare a reactorului cu amestecare perfecta continuu pot fi dezvoltate pe baza teoriei generale a sistemelor neliniare.
Modelul matematic al reactorului în regim nestationar se poate scrie în forma generala vectoriala:
![]() (210)
(210)
![]() - variabile de stare
(variabile de compozitie, temperatura de reactie, etc)
- variabile de stare
(variabile de compozitie, temperatura de reactie, etc)
![]() - variabile
independente (debite, temperatura de alimentare, etc)
- variabile
independente (debite, temperatura de alimentare, etc)
Considerând variabilele independente la valorile de regim stationar, ecuatia (210) se poate scrie în forma vectoriala echivalenta:
![]() (211)
(211)
în care X' este vectorul variabilelor de stare, iar F este un vector functie:
 ;
; 
Ecuatiile
(300) se liniarizeaza prin dezvoltare în serii Taylor în jurul starii
stationare ![]() :
:
 (212)
(212)
Introducând
vectorul X al variabilelor de
abatere ![]() si matricea A de tip Jacobian având ca elemente
si matricea A de tip Jacobian având ca elemente ![]() :
:
 ;
; 
ecuatiile (203) se pot scrie în forma vectoriala:
![]() (213)
(213)
Modelul
liniar (213) reprezinta o aproximare a modelului neliniar original (211),
în domeniul din vecinatatea starii stationare ![]() . Aproximarea este cu atât mai buna cu cât domeniul de
variatie a starii X' în
jurul valorii stationare
. Aproximarea este cu atât mai buna cu cât domeniul de
variatie a starii X' în
jurul valorii stationare ![]() este mai restrâns. La
limita, atunci când diferentele
este mai restrâns. La
limita, atunci când diferentele ![]() sunt infinetizimale,
modelele (211) si (213) se pot accepta ca echivalente, astfel încât
stabilitatea starii stationare
sunt infinetizimale,
modelele (211) si (213) se pot accepta ca echivalente, astfel încât
stabilitatea starii stationare ![]() se studiaza cu
ajutorul modelului liniarizat.
se studiaza cu
ajutorul modelului liniarizat.
Pe aceasta observatie se bazeaza teorema fundamentala a stabilitatii (Varma si Mobidelli, 1995). Se considera sistemul descris în regim tranzitoriu prin ecuatia (211) si o stare stationara obtinuta din rezolvarea ecuatiei:
![]() (214)
(214)
Starea
stationara ![]() este stabila
daca solutia ecuatiei (211),
este stabila
daca solutia ecuatiei (211), ![]() , este convergenta înspre
, este convergenta înspre ![]() :
:
![]() (215)
(215)
sau ![]() (216)
(216)
în variabilele
de abatere ![]() :
:
Conform teoremei fundamentale a
stabilitatii, starea stationara ![]() este stabila, daca sistemul liniarizat
corespunzator, descris prin ecuatia (213), este stabil, adica
solutia acestuia respecta conditia (216). În caz contrar, starea
stationara
este stabila, daca sistemul liniarizat
corespunzator, descris prin ecuatia (213), este stabil, adica
solutia acestuia respecta conditia (216). În caz contrar, starea
stationara ![]() este instabila.
este instabila.
Forma generala a solutiei ecuatiei (213) este o combinatie de exponentiale :
![]() (217)
(217)
Cki - constante de integrare; li - valorile proprii ale matricii A (Anexa 4)
Conditia (216) este îndeplinita, daca valorile proprii li sunt reale si negative, sau complexe cu partea reala negativa.
Se considera, spre exemplificare, modelul matematic constituit din ecuatiile de bilant (165) si (177), în care volumul V se presupune constant în timp si concentratia reactantului A se exprima functie de conversia acestuia, XA. Ecuatia de bilant masic (165) devine:
![]() ;
;![]() ; (218)
; (218)
iar ecuatia de bilant termic (177):
![]() (219)
(219)
Daca XAs si Ts sunt doua valori ce definesc un punct de functionare stationara, ecuatiile (218) si (219) se pot aproxima prin formele liniarizate:
![]() (220-a)
(220-a)
![]() (220-b)
(220-b)

În relatiile de mai sus, indicele s desemneaza valori de regim stationar. Introducând notatiile:
 ;
;  (220-c)
(220-c)
ecuatiile (220-a) si (220-b) se transcriu cumulat în ecuatia vectoriala:
![]() (222)
(222)
Solutia ecuatiei (222) este de forma:
![]() , i=1,2 (223)
, i=1,2 (223)
Valorile proprii ale matricii A, l l , se calculeaza prin rezolvarea ecuatiei:
![]() (224)
(224)
I - matricea unitate, având aceleasi dimensiuni cu A.
Ecuatia (224) se scrie:

sau ![]() (225)
(225)
Conditia de stabilitate a starii stationare definita de valorile XAs, Ts se traduce prin necesitatea ca dupa o perturbatie temporara XA(t) si T(t) sa revina la valorile XAs, Ts, dupa un timp suficient de îndelungat, adica:
![]() si respectiv
si respectiv ![]() (226)
(226)
sau în variabilele de abatere x1, x2:
![]() si
si ![]() (227)
(227)
Conditia de stabilitate (227) este satisfacuta daca valorile proprii l si l sunt reale si negative, sau numere complex conjugate cu partea reala negativa. În termenii coeficientilor ecuatiei (225), aceste cerinte se traduc prin inegalitatile derivate din relatiile între radacini si coeficienti:
![]() (228)
(228)
![]() (229)
(229)
Inegalitatile (228) si (229) reprezinta conditia necesara si suficienta de stabilitate, valabila pentru perturbatii de amplitudini mici, care mentin la un nivel acceptabil erorile introduse prin liniarizarea ecuatiilor de bilant. Înlocuind expresiile de definitie pentru L, M si N în aceste inegalitati, conditiile de stabilitate devin:
 (230)
(230)
 (231)
(231)
Cum se observa, conditia (231) este echivalenta cu cea dedusa prin studiul stabilitatii în diagrama q-T, definita prin inegalitatea (209). Conditia (209) este asadar o conditie necesara, nu si suficienta. Conditiile necesare si suficiente sunt date de inegalitatile (230) si (231). Desigur, rezultatul obtinut are valabilitatea limitata pentru sistemul de reactie descris de ecuatiile de bilant (165) si (177).
În cazul proceselor caracterizate prin doua variabile de stare (cum este reactorul cu amestecare perfecta, descris în paragraful anterior, prin variabilele XA si T), în planul (XA,T), o stare stationara este asociata unui punct de coordonate (XAs, Ts). Deplasarea sistemului dintr-un punct oarecare (XAi, Ti) în punctul stationar (XAs, Ts), descrie în planul (XA,T) o traiectorie de stare. Convergenta traiectoriilor de stare înspre un punct stationar poate fi continua sau oscilanta (fig. 19).
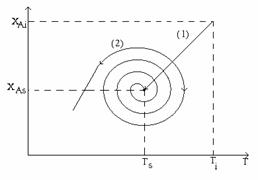
Fig. 19 Traiectorii de stare cu convergenta continua (1) sau oscilanta (2)
Convergenta continua apare atunci când, la descrierea prin ecuatiile diferentiale (220-a si b), valorile proprii l l , în expresia solutiei (223), sunt reale si negative, în timp ce convergenta oscilanta apare atunci când l si l sunt numere complex conjugate, cu partea reala negativa.
Este de subliniat în acest context, faptul ca sistemul format din ecuatiile diferentiale (220-a si 220-b) poate fi transformat în doua ecuatii diferentiale de ordinul doi liniare si omogene în x1 si respectiv x2, echivalente, având solutiile deduse în paragraful 1.2.3.2. Aceste ecuatii se obtin derivând fiecare din ecuatiile diferentiale (220) si eliminând una din variabile, astfel încât fiecare ecuatie de ordinul 2 sa ramâna într-o singura variabila. Se recomanda efectuarea acestor transformari ca exercitiu si particularizarea solutiei generale expusa la paragraful 1.2.3.2 pentru ecuatiile obtinute.
Metoda Lyapunov se bazeaza pe observatia ca orice traiectorie de stare care converge înspre un punct stabil, traverseaza "vecinatati" din ce în ce mai apropiate, situate în jurul acestuia. O "vecinatate" din jurul unui punct poate fi descrisa ca fiind o suprafata delimitata de o curba închisa, ce contine acel punct. Daca, de exemplu, se considera suprafete circulare, acestea sunt descrise de ecuatii având forma:
![]() , (r - raza conturului
liniar) (232)
, (r - raza conturului
liniar) (232)
Ecuatia (232) descrie o familie de cercuri concentrice având diferite raze, r. În notatiile introduse anterior (x1=XA - XAs si x2=T - Ts) ecuatia (232) se scrie:
![]() (233)
(233)
sau în forma vectoriala:
![]() ;
;  (234)
(234)
În acelasi mod se pot considera vecinatati (contururi închise) de forma eliptica descrise de ecuatia:
![]() (235)
(235)
sau vectorial:
![]() ;
;  (236)
(236)
În general, o curba închisa în jurul originii (care reprezinta punctul stationar în variabilele de abatere x1 si x2), este descrisa prin ecuatia:
![]() (a >0) (237)
(a >0) (237)
Punctele de intersectie între o traiectorie de stare convergenta înspre origine si o familie de curbe închise, de parametru a, descrise prin ecuatia (237), vor verifica simultan atât ecuatiile ce descriu traiectoria (de exemplu (218) si (219) sau (220-a) si (220-b)) cât si ecuatia ce descrie familia de contururi închise (237). Vectorul X ce reprezinta coordonatele acestor puncte si functionala V(X) îndeplinesc urmatoarele proprietati:
![]() (238)
(238)
![]() (239)
(239)
![]() (240)
(240)
![]() (241)
(241)
![]() - norma vectorului X.
- norma vectorului X.
O functionala V(X) cu proprietatile de mai sus este denumita functionala Lyapunov . Inegalitatea (240) reprezinta conditia ca, în timp, contururile închise pe care le intersecteaza traiectoria de stare sa aiba dimensiuni din ce în ce mai mici, ceea ce garanteaza convergenta continua înspre punctul stationar, de coordonate (0,0) în planul (x1, x2) sau (XAs, Ts) în planul (XA,T)..
Exemplu:
Fie forma particulara a ecuatiilor de stare:
![]() (242)
(242)
![]() (243)
(243)
si ![]() (contur circular).
(contur circular).
Punctele de intersectie între o traiectorie descrisa de
ecuatiile (242) - (243) si cercurile din jurul originii de
ecuatie ![]() (a>0) îndeplinesc conditiile (238), (239) si (241),
prin natura functionalei V(X).
Pentru a verifica daca si conditia (230) este îndeplinita,
se calculeaza expresia derivatei:
(a>0) îndeplinesc conditiile (238), (239) si (241),
prin natura functionalei V(X).
Pentru a verifica daca si conditia (230) este îndeplinita,
se calculeaza expresia derivatei:
![]() (244)
(244)
Derivatele ![]() si
si ![]() sunt date de
ecuatiile de stare ce descriu evolutia în timp a procesului (232)
si (233). Înlocuind rezulta:
sunt date de
ecuatiile de stare ce descriu evolutia în timp a procesului (232)
si (233). Înlocuind rezulta:
![]()
sau
![]() (245)
(245)
Traiectoriile descrise de ecuatiile (242) si (243) sunt asadar convergente înspre origine. Punctul stationar reprezentat de originea planului (x1, x2) în aceasta descriere, este un punct stationar stabil.
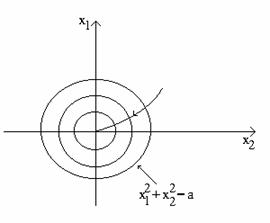
Fig. 20 Traiectorie de stare si vecinatati circulare, în jurul unui punct stationar stabil
Se propune analiza stabilitatii unei stari stationare a procesului descris prin sistemul de ecuatii diferentiale liniare în variabilele de abatere x1, x2.xn (ecuatii obtinute prin liniarizarea modelului matematic al procesului în jurul starii stationare analizate) :
 (246)
(246)
sau ecuatia vectoriala echivalenta:
![]() (247)
(247)
în care:
 ;
; 
Pentru aplicarea metodei Lyapunov, se defineste o functionala de forma:
 (248)
(248)
si se analizeaza conditiile în care aceasta respecta conditiile (238) - (241) care garanteaza stabilitatea. Daca matricea P este definita pozitiv, sunt asigurate proprietatile reprezentate prin relatiile (238), (239) si (241).
Se analizeaza, în continuare, conditiile în care este îndeplinita proprietatea (240). Din (248) si (247) rezulta:
![]() (249)
(249)
![]()
sau ![]() (250)
(250)
![]() (251)
(251)
Proprietatea (240) este îndeplinita, daca matricea Q definita prin relatia (251) este definita pozitiv. Existenta a doua matrici definite pozitiv, P si Q, corelate prin intermediul relatiei (251), reprezinta conditia necesara ca functionala V(X) definita prin relatia (248) sa fie o functionala Lyapunov, care garanteaza stabilitatea procesului descris prin ecuatia (247).
Pentru modelul reprezentat prin ecuatiile diferentiale liniare (220-a) si (220-b), sau în forma vectoriala, prin ecuatia (222), matricea P este de dimensiuni (2 2), iar functionala V(X) are forma:
 (252)
(252)
În relatia (251) se alege una din matricile P sau Q, definita pozitiv, urmând ca cealalta sa fie calculata si sa fie verificat daca este definita pozitiv.
Se presupune în continuare matricea Q în cea mai simpla forma, aceea de matrice unitate:
![]() (253)
(253)
Elementele matricii P se calculeaza din ecuatia vectoriala (241):
 (254)
(254)
Efectuând calculele rezulta:
 (255)
(255)
sau
![]() (256)
(256)
![]() (257)
(257)
![]() (258)
(258)
![]() (259)
(259)
Elementele matricii A fiind cunoscute (definite prin relatia (220-c)), matricea P se calculeaza din ecuatiile (257) - (259). Din (257) si (258) rezulta p12=p21 (matricea P este simetrica). Matricea P, astfel obtinuta, este definita pozitiv daca valorile determinantilor principali ai acesteia sunt strict pozitive. Rezulta astfel inegalitatile necesare pentru asigurarea proprietatii de stabilitate:
![]() (260)
(260)
![]() (261)
(261)
Aplicatie numerica: Se considera urmatoarele valori ale parametrilor constructivi si de operare ai reactorului descris prin ecuatiile de bilant (165) si (177):
V=1.57 m3; ST = 7.07 m2; KT= 400 Kcal/m2hK; Dv0= 84.15 l/min; CA0= 2.8 mol/l; r=800 kg/m3;
cp= 0.7 kcal/kgK; T0=![]() =350 K; DHRA= -40Kcal/mol; vRA= k(T) CA;
=350 K; DHRA= -40Kcal/mol; vRA= k(T) CA;
![]() .
.
Pentru acest sistem de reactie se obtin trei puncte de functionare stationara:
M1(XAs=0.035; Ts=353K), M2(XAs=0.5; T=400K) si M3(XAs=0.909; Ts=440.6 K).
Se va expune în continuare aplicarea procedurii expusa mai sus, pentru verificarea stabilitatii starii stationare M3.
a) Calculul elementelor matricii coeficientilor, A, în modelul liniarizat (relatia 220-c).
![]() ;
;  mol/l min
mol/l min
![]() mol/l min K ;
mol/l min K ;  ;
; ![]() ;
; ![]() K;
K; ![]() ;
;  ;
; ![]() ;
; ![]()
![]() ;
; ![]()
![]() ;
; ![]()
Solutia sistemului de ecuatii (256) - (259) este: p11=1.43; p12=p21= - 235.21; p22= 42770.925.
Inegalitatile (260) si (261) fiind verificate, punctul studiat, M3 (XAs=0.909; Ts=440.6 K), este un punct stationar stabil.
Confirmarea stabilitatii locale are o utilitate limitata,
întrucât indica doar faptul ca traiectoriile din vecinatatea
unui punct stationar sunt convergente, fara însa a furniza
informatii referitoare la extinderea acestei vecinatati.
Vecinatatea unui punct cu proprietatea enuntata mai sus este
denumita regiune de stabilitate. Convergenta traiectoriilor într-o
regiune de stabilitate poate avea loc fie înspre un punct de regim
stationar (fig. 21-a), fie înspre o traiectorie stabilizata de tip
oscilant (fig. 21-b), reprezentata în planul fazelor printr-o curba
închisa. Regiunea de stabilitate descrisa în primul caz, este
denumita regiune de stabilitate asimptotica si se
caracterizeaza matematic prin respectarea în orice punct al acesteia, a
inecuatiei ![]() . Traiectoria stabilizata de tip oscilant, descrisa
în al doilea caz, apare în cazurile de exceptie, în care
. Traiectoria stabilizata de tip oscilant, descrisa
în al doilea caz, apare în cazurile de exceptie, în care ![]() . Conditia generala
. Conditia generala ![]() defineste
asadar la modul general o regiune de stabilitate.
defineste
asadar la modul general o regiune de stabilitate.
Etapele determinarii regiunilor de stabilitate ale reactorului R descris prin variabilele de stare CA si T sunt urmatoarele:
se alege o
functionala Liapunov ![]() ;
;
se
determina expresiile matematice ale derivatei acesteia în raport cu timpul
si se reprezinta grafic în spatiul starilor (planul stare CA
- T), curba descrisa de ecuatia ![]() , care delimiteaza doua semiplane.
, care delimiteaza doua semiplane.
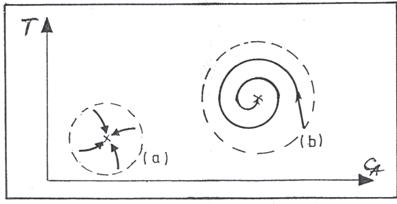
Fig. 21-a Regiuni de stabilitate asimptotica ; convergenta continua; (b) convergenta oscilanta
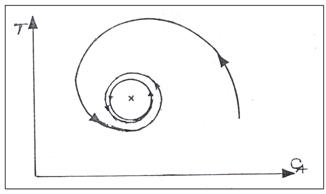
Fig. 21-b Regiune de stabilitate oscilanta
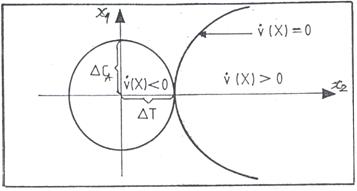
Fig. 22 Determinarea unei regiuni de stabilitate
Se
determina conturul închis V(X)=ct.,
de dimensiune maxima situat în semiplanul ![]() . Acest contur constituie o regiune de stabilitate
asimptotica. Daca în expresia functionalei (248) se introduce P=I
(matricea unitate), regiunea de stabilitate asimptotica V(X)=ct este reprezentata prin
suprafata din interiorul unui cerc, tangent la curba
. Acest contur constituie o regiune de stabilitate
asimptotica. Daca în expresia functionalei (248) se introduce P=I
(matricea unitate), regiunea de stabilitate asimptotica V(X)=ct este reprezentata prin
suprafata din interiorul unui cerc, tangent la curba ![]() (v.fig. 21-a). Metoda
expusa permite determinarea ordinului de marime a abaterilor DCA si DT admise, în conditiile mentinerii
stabilitatii în jurul punctului de functionare
stationara. Conditiile de stabilitate furnizate de aceasta
metoda sunt conditii suficiente, însa nu neaparat necesare.
Metoda Liapunov furnizeaza informatii necesare determinarii unei
regiuni de stabilitate asimptotica, fara a garanta daca s-a
identificat întreaga regiune reala de stabilitate a reactorului. Forma
si dimensiunile acestei regiuni sunt dependente de forma functionalei
V(X) cu care se lucreaza.
(v.fig. 21-a). Metoda
expusa permite determinarea ordinului de marime a abaterilor DCA si DT admise, în conditiile mentinerii
stabilitatii în jurul punctului de functionare
stationara. Conditiile de stabilitate furnizate de aceasta
metoda sunt conditii suficiente, însa nu neaparat necesare.
Metoda Liapunov furnizeaza informatii necesare determinarii unei
regiuni de stabilitate asimptotica, fara a garanta daca s-a
identificat întreaga regiune reala de stabilitate a reactorului. Forma
si dimensiunile acestei regiuni sunt dependente de forma functionalei
V(X) cu care se lucreaza.
Aplicatie:
Sa se identifice o regiune de stabilitate a unui reactor R, în care
are loc o reactie ireversibila de ordinul I. Se cunosc
urmatoarele date: ![]() h-1
h-1
Parametrii de operare (valori de regim stationar):
CA0 = 4.325 kmoli/m3; V= 2.83 m3; Dv = 5.66 m3/h; KT ST=226.86 kcal/h K; T0=Ta= 294 K
Constantele sistemului de reactie: DHRA=-5557.2 kcal/kmol; r cp= 801.2 kcal/m3 K
În regim dinamic functionarea reactorului este descrisa prin ecuatiile (165) si (177) scrise în forma:
![]() ;
; ![]() (262)
(262)
![]() (263)
(263)
iar în regim stationar:
![]() ;
; ![]() (264)
(264)
![]() (265)
(265)
Prin solutionarea sistemului de ecuatii (264) - (265) se obtine un singur punct de functionare stationara: CA,s=2.692 kmol/m3; Ts= 304.786 K
Se definesc abaterile temperaturii si concentratiei: ![]() ;
; ![]()
Prin scaderea ecuatiei (265) din ecuatia (263) si a ecuatiei (264) din ecuatia (262), se obtine:
 (266)
(266)
![]() (267)
(267)
se introduc în continuare notatiile:
![]() ;
; ![]() ;
;![]() ;
; ![]() ;
;![]() ;
; ![]()
Înlocuind în (266) si (267) rezulta:
![]() (268)
(268)
![]() (269)
(269)
Se propune o functionala Liapunov de forma:
![]() ;
; ![]()
Înlocuind ![]() si
si ![]() din (268) si
(269), dupa regruparea termenilor se obtine:
din (268) si
(269), dupa regruparea termenilor se obtine:

Se reprezinta grafic ecuatia ![]() si se
identifica semiplanele în care
si se
identifica semiplanele în care ![]() si
si ![]() (fig. 23). Se
traseaza apoi elipsa de dimensiune maxima situata în regiunea
(fig. 23). Se
traseaza apoi elipsa de dimensiune maxima situata în regiunea ![]() , din care rezulta abateri admise ale temperaturii de
pâna la 11 °C în jurul punctului de functionare stationara.
Ţinând seama de forma functionalei propuse, regiunea de stabilitate
asimptotica va fi reprezentata printr-o suprafata
eliptica, situata în semiplanul în care
, din care rezulta abateri admise ale temperaturii de
pâna la 11 °C în jurul punctului de functionare stationara.
Ţinând seama de forma functionalei propuse, regiunea de stabilitate
asimptotica va fi reprezentata printr-o suprafata
eliptica, situata în semiplanul în care ![]() (fig. 23).
(fig. 23).
Pentru un sistem (reactor chimic) descris în regim dinamic prin ecuatia de stare vectoriala:
![]() ;
; ![]()
metoda Krasovskii utilizeaza o functionala V(X) de forma:
![]() (270)
(270)
P(n n) - matrice patrata definita pozitiv
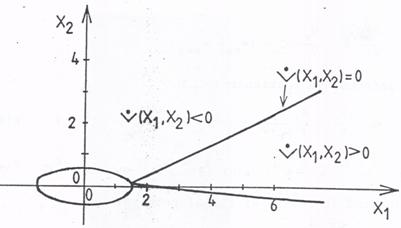
Fig. 23 Determinarea unei regiuni de stabilitate eliptice pentru reactorul R
Ca urmare a dependentei univoce între X si F, în cazul în care n=2, unei elipse din planul (f1, f2) îi corespunde o curba închisa în planul (x1, x2). Pentru n>2 se obtin hipersuprafete închise atât în spatiul (f1, f2, .) cât si spatiul (x1, x2, .).
V(X) astfel definita
satisface conditiile unei functionale Liapunov, cu exceptia
conditiei ![]() , ce ramâne a fi verificata. Se analizeaza în
continuare aceasta conditie:
, ce ramâne a fi verificata. Se analizeaza în
continuare aceasta conditie:
![]() (271)
(271)
![]() (272)
(272)
 (273)
(273)
Înlocuind ![]() în (271) si
tinând seama ca
în (271) si
tinând seama ca ![]() , se obtine în continuare:
, se obtine în continuare:
![]() (274)
(274)
Se noteaza: ![]() (275)
(275)
Rezulta: ![]() (276)
(276)
Conditia ![]() , se transforma astfel în conditia ca matricea
patrata Q sa fie
definita pozitiv. În conformitate cu metoda Krasovskii, punctele din interiorul unei regiuni de stabilitate
asimptotica satisfac conditia ca matricea Q definita prin relatia (275) sa fie definita
pozitiv.
, se transforma astfel în conditia ca matricea
patrata Q sa fie
definita pozitiv. În conformitate cu metoda Krasovskii, punctele din interiorul unei regiuni de stabilitate
asimptotica satisfac conditia ca matricea Q definita prin relatia (275) sa fie definita
pozitiv.
Etapele determinarii regiunilor de stabilitate a reactorului R sunt urmatoarele:
Se alege
functionala ![]() , presupunând într-un mod oarecare elementele matricii P;
, presupunând într-un mod oarecare elementele matricii P;
Se determina elementele matricii J si în continuare cele ale matricii Q;
Se determina regiunea în care matricea Q este definita pozitiv;
Se
stabileste conturul închis descris de ecuatia V(X)=ct, de dimensiune maxima situat în semiplanul ![]() , deci semiplanul în care matricea Q este definita pozitiv. Acest contur delimiteaza o
regiune de stabilitate asimptotica.
, deci semiplanul în care matricea Q este definita pozitiv. Acest contur delimiteaza o
regiune de stabilitate asimptotica.
În continuare se prezinta modul de determinare prin aceasta metoda a regiunii de stabilitate a unui reactor R, în care are loc o reactie ireversibila de ordinul I.
Se reiau ecuatiile (268) si (269) sub forma:
![]()
![]()
Se propune: ![]() ;
;  ; (277)
; (277)
 ;
;  (278)
(278)
Se calculeaza elementele matricii Q:
 (279)
(279)
Pentru ca matricea Q sa fie definita pozitiv este necesar sa fie îndeplinite conditiile:
![]() (280)
(280)
Se traseaza curbele q11=0 si ![]() si se stabileste conturul închis caracterizat de
ecuatia:
si se stabileste conturul închis caracterizat de
ecuatia: ![]() , de dimensiune maxima situat în semiplanul
, de dimensiune maxima situat în semiplanul ![]() , în care matricea Q
este definita pozitiv (deci semiplanul în care sunt îndeplinite simultan
inecuatiile (280)) . Acest contur este un cerc în planul (f1, f2)
si o curba închisa de o alta forma în planul fazelor
(x1, x2)
, în care matricea Q
este definita pozitiv (deci semiplanul în care sunt îndeplinite simultan
inecuatiile (280)) . Acest contur este un cerc în planul (f1, f2)
si o curba închisa de o alta forma în planul fazelor
(x1, x2)
 |
Pentru o anumita metoda de determinare a
regiunii de stabilitate asimptotica, se poate identifica regiunea de
extindere maxima pe care este garantata stabilitatea,
solutionând problema de maximizare a parametrului k din ecuatia V(X)
= k, în conditiile
respectarii restrictiei ![]() .
.
Solutionarea acestei probleme este posibila prin metoda multiplicatorilor Lagrange, maximizând functionala:
![]() ; (L - multiplicator Lagrange). (281)
; (L - multiplicator Lagrange). (281)
Din conditiile de maxim, rezulta ecuatiile:
 (282)
(282)
Din rezolvarea sistemului (282) rezulta solutiile:
![]()
Notând ![]() , regiunea maxima de stabilitate asimptotica este
delimitata de conturul descris de ecuatia:
, regiunea maxima de stabilitate asimptotica este
delimitata de conturul descris de ecuatia:
![]() (283)
(283)
|
