SOFTWARE INDUSTRIAL
Denumirea de software industrial se refera la o tendinta moderna de integrare a unor medii software diferite pentru producerea rapida de aplicatii industriale.
Producatorii de software au raspuns rapid cerintelor pietii, dezvoltând medii de programare dedicate. Asa au aparut medii integrate de dezvoltare de aplicatii pentru gestiunea bazelor de date, pentru dezvoltarea de aplicatii grafice sau pentru dezvoltarea de aplicatii industriale.
Prin aplicatie industriala întelegem programe specializate în achizitia, prelucrarea sau analiza informatiilor provenite din diferite procese industriale. Toate aceste prelucrari sunt facute fie în scopul supravegherii (monitorizarii) proceselor industriale, fie în scopul elaborarii unor comenzi catre aceste procese.
Decidem ca pri 16116b116q n aplicatie industriala întelegem orice aplicatie care are legatura directa cu procesul real si care monitorizeaza evolutia în timp a proceselor, analizeaza desfasurarea lor sau comanda anumite marimi caracteristice acestor procese în scopul obtinerii unor performante dorite.
În limbajul ingineresc de specialitate de obicei prin aplicatie industriala întelegem, într-un cadru mai larg, orice aplicatie în timp real.
O aplicatie în timp real se executa pe un sistem în timp real. Un sistem în timp real (real-time system) reprezinta un computer capabil sa proceseze evenimente din mediul real la imediata lor aparitie, sub constrângerea unui ceas de timp real, si care poate implementa algoritmi într-un mediu hardware dedicat. Un sistem de timp real poate fi reprezentat, de exemplu, de un telefon mobil, de un echipament de testare sau masurare sau de sisteme de control implementate pe scara larga în industrie.
În general, prin aplicatie în timp real întelegem orice aplicatie a carei desfasurare în timp este strict legata de timpul fizic real. În general aceasta legatura cu timpul real se realizeaza cu ceasul de timp real al sistemului de calcul, printr-un sistem de întreruperi implementat de aplicatie sau de sistemul de operare.
O aplicatie de proces are doua componente principale: componenta software si componenta hardware. Tendinta generala este aceea de standardizare a acestor componente.
Odata cu sporirea capacitatilor sistemelor de calcul (viteza de procesare crescuta, capacitati de memorare sporite), foarte multi producatori au trecut la fabricarea asa numitelor placi de achizitie si control (placi de proces) în arhitectura standardizata. Aceste sunt de fapt placi de extensie atasate la placa de baza a calculatorului dotate cu interfete de proces. Ele se pot cupla, eventual cu ajutorul unor dispozitive de interfatare suplimentare, la un proces industrial. Intrarile/iesirile de proces sunt asigurate de convertoare analog/numerice (CAN) respectiv convertoare numeric/analogice (CAN) precum si de intrari/iesiri numerice.
Sistemul de operare gestioneaza functionarea acestor placi de proces în general printr-un sistem de întreruperi sau prin canale de acces direct la memorie (DMA).
Aceste placi de proces transforma un PC în calculator de proces si confera o foarte mare flexibilitate si versatilitate în dezvoltarea de aplicatii de proces adaptate cerintelor beneficiarului.
Prin standardizarea componentei hardware de proces, accentul în proiectare cade asupra utilizarii mediului software de dezvoltare de aplicatii de timp real.
3.1 Dezvoltarea unei aplicatii în timp real
Abordarea traditionala a proiectarii si respectiv a implementarii unei aplicatii de timp real implica mai multe echipe de ingineri, incluzând o echipa care proiecteaza algoritmul de conducere sau de prelucrare a datelor din sistem, o echipa de programatori (echipa software), o echipa de proiectanti hardware precum si o echipa de integratori de sistem care implementeaza efectiv toate realizarile celorlalte echipe.
Când achipa de proiectanti ai algoritmului de conducere sau de prelucrare a datelor a îndeplinit toate specificatiile, echipa de software implementeaza algoritmul într-un mediu de simulare si specifica cerintele hardware. Echipa de proiectare hardware creaza asa numitul hardware de productie (production hardware). În final, echipa de implementare integreaza hardware-ul într-un sistem industrial mai cuprinzator. Procesul traditional de dezvoltare de aplicatii de timp real dureaza în general foarte mult deoarece el are un caracter iterativ.
În cazul în care implementarea solutiei în sistemul general nu conduce la rezultatele scontate, toate celelelte echipe s-ar putea sa fie nevoite sa reia procesul de proiectare.
Mai mult, trebuie avut în vedere costul ridicat al unui proces de reproiectare. Modificari ale specificatiilor hardware cerute de echipa software conduc la costuri mari pe care le implica reproiectarea si modificarea dispozitivelor hardware necesare.
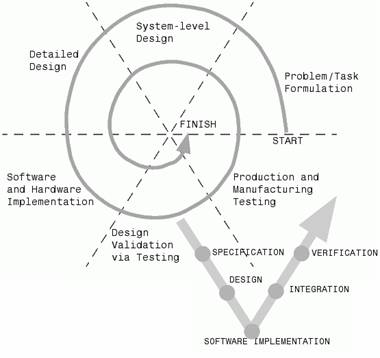
Spirala procesului de proiectare
Se poate afirma ca marii producatori de solutii pentru dezvoltarea de aplicatii de timp real au adoptat doua strategii.
Prima strategie, pe care o vom numi software industrial dedicat (custom software), consta în integrarea unui software specializat cu hardware-ul produs. Aceasta strategie poate fi semnalata la firma National Instruments care produce software-ul de proces LabVIEW pentru gama de placi de achizitii pe care o fabrica.
Avantajul acestei abordari consta în reducerea la minim a timpului de dezvoltare a unui sistem de productie. Se porneste de la premiza folosirii unui echipament hardware (placa de achizitii) de mare performanta si deosebit de flexibila în aplicatii. Acest lucru conduce la înlaturarea penultimei verigi din lantul de dezvoltare de aplicatii de proces clasic, anume implementarea specificatiilor hardware. Aplicatia de proces este cea care va suferi modificari iterative pâna când se va gasi solutia cea mai buna. Sistemul de dezvoltare de aplicatii de timp real LabVIEW este deosebit de productiv, usor de utilizat si dotat cu o interfata grafica cu utilizatorul performanta.
Dezavantajele strategiei de software industrial dedicat constau tocmai în legarea software-ului de aplicatie de folosirea placilor de proces ale unui unic producator, anume National Instruments.
Mai mult, sub mediul de dezvoltare de aplicatii de timp real LabVIEW nu se pot genera aplicatii de sine-statatoare. O aplicatie de timp real conceputa în acest fel se lanseza numai din mediul de timp real LabVIEW. Aceasta înseamna ca beneficiarul unei aplicatii de proces generate în aceasta strategie va fi nevoit sa achizitioneze si hardware-ul si mediul software de dezvoltare de la acelasi producator.
Mai noile variante ale LabVIEW, cele pornind de la varianta 6, asigura posibilitatea folosirii si a unor placi de proces produse de alte firme.
A doua strategie, pe care o vom numi software industrial de uz general (general purpose software), este cea implementata spre exemplu de divizia de matematici aplicate de la MIT (Massachussets Institute of Technology). MathWorks, Inc. este producatorul unui sistem de dezvoltare de aplicatii de timp real de înalta productivitate.
Acest sistem de dezvoltare integreaza trei componente: Real-Time Workshop, MATLAB, si Simulink. Fiecare aplicatie are un rol bine definit în procesul de proiectare a aplicatiilor de timp real.
o MATLAB: Furnizeaza instrumente pentru proiectare, analiza si vizualizarea datelor.
o Simulink: Furnizeaza suport pentru modelare, simulare si validare.
o Real-Time Workshop: Genereaza cod C din modelele Simulink si furnizeaza un cadru pentru rularea codului produs în timp real, pentru acordarea parametrilor si pentru vizualizarea datelor în timp real.
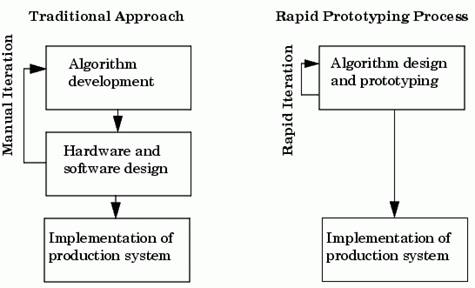
Folosind o astfel de arhitectura putem realiza asa-numitul proces de dezvoltare rapida a prototipului care reduce la minim timpul si costurile de realizare a unui prototip propus pentru sistemul de productie. Deosebirea fata de abordarea traditionala este prezentata în figura de mai sus.
Se constata o reducere a numarului de etape de la trei la doua doar prin disparitia etapei de proiectare a specificatiilor hardware si implementare. De asemenea, prin folosirea unui mediu software de înalta productivitate, se poate trece direct de la faza de simulare la cea de generare de cod executabil si testare a prototipului.
Cele trei componente software mai sus mentionate sunt înglobate într-un mediu de dezvoltare care face apel, în final, la un compilator compatibil ANSI C pentru crearea de executabile de timp real. Aceasta strategie de integrare a unui software ce reprezinta mediul unui limbaj de programare de nivel înalt (spre exemplu C/C++) se numeste third party software integration.
Strategia adoptata creaza un sistem de productie de aplicatii de proces deschis. La ora actuala sunt create drivere pentru aproximativ 200 de placi de proces ale diferitelor firme consacrate pe plan international. Sistemul este deschis deoarece programatorul poate concepe drivere proprii pentru diferitele solutii hardware adoptate pe care le poate utiliza pentru dezvoltarea rapida de aplicatii de proces. Odata pusa la punct o aplicatie pentru o anumita placa de achizitii ea se poate folosi cu modificari minime pentru un alt tip de placa de achizitii.
Avantajele adoptarii acestei strategii constau în:
Mare flexibilitate în dezvoltarea de aplicatii de proces
Utilizarea unui mediu integrat de calcul, analiza, proiectare si simulare si generare de aplicatii de timp real. Proiectantul se poate implica la toate nivelurile procesului de productie pornind de la proiectarea algoritmului, modelarea si simularea functionarii sale precum si a procesului pe care îl gestioneaza si terminând cu obtinerea de cod executabil din modelele simulate.
Utilizarea unei interfete grafice cu utilizatorul care face posibila dezvoltarea de aplicatii de proces usor de exploatat de catre beneficiar.
Posibilitatea implementarii unor algoritmi de conducere sau de prelucrare a datelor deosebiti de performanti care apeleaza la biblioteci matematice sofisticate.
Timp minim alocat dezvoltarii de aplicatii de proces
Cost minim pentru dezvoltarea de aplicatii de proces
Obtinerea de executabile de timp real independente, care nu mai necesita prezenta mediului software cu care au fost generate.
Dezavantajele strategiei de software industrial de uz general sunt mici în comparatie cu avantajele sale. Un dezavantaj ar fi acela ca proiectantul care foloseste software industrial de uz general trebuie sa fie mult mai bine instruit decât cel care foloseste software industrial dedicat. Aceasta deoarece gestionarea software-ului industrial de uz general presupune buna cunoastere a tuturor etapelor pe care le implica dezvoltarea unei aplicatii de timp real, pornind de la specificatiile de proiectare ale algoritmului de reglare si ajungând la specificatiile hardware ale placii de proces.
Odata surclasata aceasta dificultate se pot genera aplicatii de proces de uz general cu cheltuieli minime si într-un timp foarte scurt.
Totusi, este normal sa semnalizam si alt dezavantaj. Aplicatiile efective de proces sunt uneori foarte restrictive. Spre exemplu, pentru a putea folosi procesoare de semnal la capacitati maxime suntem nevoiti sa concepem cod care sa nu depaseasca dimensiuni de 1 KB..4 KB. Evident, atunci va fi necesar sa scriem cod C sau chiar asamblare. Oricum, faza de testare a algoritmilor se presupune realizata si pâna la implementarea codului putem folosi cu succes software industrial de uz general.
Procesul de elaborare rapida a prototipului combina faze de proiectare din diverse etape: proiectarea algoritmului adecvat, proiectare software sau proiectare hardware. Aceasta abordare elimina multe disfunctionalitati permitând inginerilor sa obtina sau sa vizualizeze rezultatele si sa itereze rapid diferite solutii înainte de constructia finala a prototipului.
O mare facilitate a mediului integrat MATLAB/Simulink/RTW o reprezinta programarea automata (automating programming). Aceasta titulatura caracterizeaza capacitatea acestui mediu integrat de a produce automat cod obiect pornind de un model (existent în Simulink) care implementeaza comportamentul dorit.
Constructia automata a programelor permite modificarea unor parametri de proiectare direct în diagrama bloc ce caracterizeaza echipamentul sau subsistemul proiectat.
Într-un singur proces, desfasurat automat, se poate face trecerea de la proiectarea algoritmului optimal si testarea parametrilor la procesul de generare de cod obiect (incluzând compilarea, link-editarea si descarcarea codului obtinut spre hardware-ul tinta (target hardware) pentru care a fost proiectat).
Procesul de generare automata de software industrial cuprinde urmatoarele etape:
Folosirea unor toolbox-uri specializate din MATLAB (Control Toolbox, Signal Processing Toolbox, Fuzzy Toolbox, Robust Control Toolbox, Neural Network Toolbox) pentru proiectarea unui algoritm de reglare sau de prelucrare a semnalelor care sa îndeplineasca cerintele de proiectare.
Proiectarea unui model în Simulink ce implementeaza modelul procesului industrial pentru care a fost proiectat algoritmul. Într-un sistem de reglare automat se poate modela dinamica instalatiei tehnologice sau a partii fixe precum si alte componente dinamice precum controllerul implementat sau, dupa caz, observerul.
Simularea modelului sistemului industrial real sub Simulink. Se pot folosi din nou MATLAB si toolbox-urile componente precum si Simulink într-un proces iterativ de modelare si analiza pâna când rezultatele obtinute sunt acceptate.
Generarea codului sursa C si, eventual, a codului obiect folosind Real-Time Workshop.
Din momentul în care rezultatele simularii sunt acceptabile, se poate genera cod C pentru o anumita tinta hardware. Acest cod C se obtine prin prelucrarea unei portiuni bine definite din modelul simulat. Se poate folosi Simulink într-un mod extern pentru a putea face o testare a functionarii algoritmului proiectat on-line. Se pot reacorda parametrii pentru obtinerea unei bune functionari a algoritmului proiectat cuplat direct la proces si functionând în timp real. Se poate face din nou apel la un proces iterativ de obtinere a celei mai bune solutii.
Se implementeaza un prototip de productie (production prototype). În acest stadiu procesul de obtinere rapida a prototipului este complet. Se poate trece la faza de implementare efectiva a prototipului cu încrederea ca algoritmul proiectat va functiona corect în sistemul de productie în timp real. Diagrama de mai jos descrie cum decurge un proces de generare a unei aplicatii de timp real.
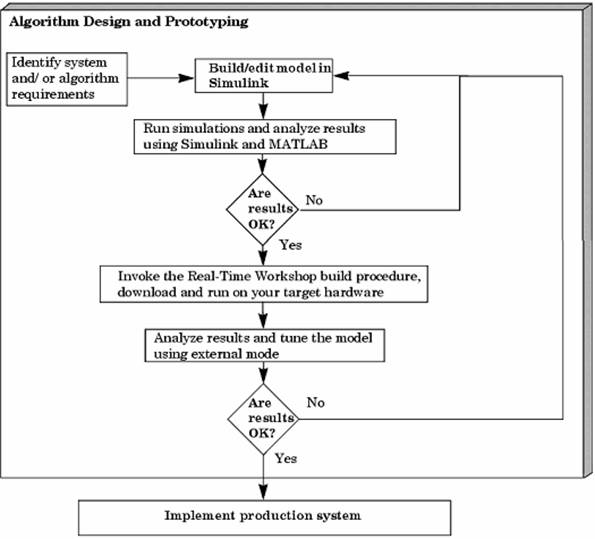
Figura 1-3: Procesul de dezvoltare rapida a prototipului
În continuare vom face o scurta prezentare a componentelor integrate în pachetul MATLAB/Simulink/Real-Time Workshop.
3.2 Mediul de dezvoltare de aplicatii de timp real MATLAB/Simulink/Real-Time Workshop
3.2.1 MATLAB
MATLAB® reprezinta un limbaj foarte performant specializat pentru calculul tehnic. El integreaza calculul matematic, facilitati de vizualizare (reprezentare grafica) precum si o modalitate foarte simpla si intuitiva de programare în care problemele si solutiile sunt exprimate într-o notatie matematica familiara inginerilor.
Nucleul MATLAB este reprezentat de:
Biblioteca matematica
Dezvoltarea de algoritmi
Achizitii de date
Modelare, simulare si elaborare de prototipuri
Analiza de date, explorare si vizualizare
Grafica pentru uz stiintific si ingineresc
Dezvoltare de aplicatii care include si constructia interfetelor grafice cu utilizatorul
MATLAB este un sistem interactiv la care data elementara este o matrice care nu necesita declararea dimensiunilor. Bibliotecile matematice sunt concepute pentru manipularea curenta a tipurilor de date de tip matricial, ceea ce ne permite rezolvarea facila a numeroaselor probleme de calcul tehnic bazate pe o formulare vectoriala sau matriciala. În acest fel, în mod normal, în MATLAB nu vom întâlni foarte des bucle for sau do.while ceea ce conduce la un timp elaborare a programului sau de executie a sa mult mai mic decât cel necesar implementarii aceluiasi algoritm în limbaje scalare noninteractive precum Fortran sau C.
Numele MATLAB provine din matrix laboratory. MATLAB a fost conceput la origine pentru un acces rapid la software-ul matricial dezvoltat de proiectele LINPACK si EISPACK. Astazi MATLAB incorporeaza si bibliotecile LAPACK si BLAS si este considerat de majoritatea utilizatorilor drept o capodopera a software-ului pentru calcul matricial.
În mediile universitare MATLAB reprezinta instrumentul standard de instruire în cursuri introductive sau avansate de matamatici, inginerie sau cercetare stiintifica. În industrie MATLAB este folosit pe scara larga pentru cercetare de mare productivitate, pentru dezvoltare sau analiza.
MATLAB este un sistem deschis care se dezvolta prin contributia tuturor utilizatorilor. Producatorii au adaugat de-a lungul timpului o serie de solutii specifice unor aplicatii de larg interes, grupate în asa-numitele toolbox-uri. Un lucru apreciat de foarte multi utilizatori este faptul ca aceste toolbox-uri permit învatarea si aplicarea de tehnologii specializate.
Toolbox-urile reprezinta o colectie completa de functii MATLAB (fisiere cu extensia .M, M-files) care extind mediul MATLAB pentru rezolvarea unor clase particulare de probleme. Ariile în care sunt disponibile aceste toolbox-uri include procesarea semnalelor, sisteme de control, retele neuronale, logica fuzzy, undine, simulare si multe altele.
Sistemul MATLAB consta din cinci parti principale:
Mediul de dezvoltare MATLAB. Acesta este reprezentat de un set de instrumente si facilitati care sunt utile pentru lucrul cu functii si fisiere MATLAB. Multe astfel de instrumente sunt interfete grafice cu utilizatorul. Acestea includ MATLAB desktop si fereastra de comanda (command window), o fereastra care retine un istoric al comenzilor date (command history window), un editor si un debugger si browsere pentru vizualizarea unui sistem de help-uri foarte bine realizat, a spatiului de lucru sau a fisierelor din diferite directoare.
Biblioteca de functii matematice MATLAB. Aceasta consta dintr-o vasta colectie de algoritmi de calcul ce pornesc de la functii elementare (suma, sinus, cosinus, aritmetica complexa) si ajung la functii mai sofisticate precum inversarea matricilor, valori proprii, functii Bessel sau transformata Fourier rapida (FFT).
Functiile matematice sunt organizate în 8 directoare:
|
elmat |
Elementary matrices and matrix manipulation. |
|
Elfun |
Elementary math functions. |
|
Specfun |
Specialized math functions. |
|
Matfun |
Matrix functions - numerical linear algebra. |
|
Datafun |
Data analysis and Fourier transforms. |
|
Polyfun |
Interpolation and polynomials. |
|
Funfun |
Function functions and ODE solvers. |
|
Sparfun |
Sparse matrices. |
Limbajul MATLAB. Acesta este un limbaj matricial de nivel înalt care implementeaza instructiuni de control al fluxului, functii, structuri de date, intrari/iesiri si capabilitati de programare orientata pe obiect. Se pot crea programe de dimensiuni mici, care sa rezolve probleme punctuale într-un timp foarte scurt, dar sunt posibile si programe de dimensiuni foarte mari care sa implementeze aplicatii foarte complexe.
Facilitatile de programare sunt organizate pe 6 directoare:
|
ops |
Operators and special characters. |
|
Lang |
Programming language constructs. |
|
Strfun |
Character strings. |
|
Iofun |
File input/output. |
|
Timefun |
Time and dates. |
|
Datatypes |
Data types and structures. |
Grafica (Handle Graphics). Reprezinta sistemul grafic al MATLAB-ului. Cuprinde comenzi de înalt nivel pentru vizualizarea datelor bi si tri-dimensionale, procesarea imaginilor, animatie, prezentari de grafice. Permite de asemenea utilizarea unor comenzi de nivel scazut pentru crearea unor interfete grafice GUI. Functiile grafice sunt organizate în 5 directoare:
|
graph2d |
Two-dimensional graphs. |
|
Graph3d |
Three-dimensional graphs. |
|
Specgraph |
Specialized graphs. |
|
Graphics |
Handle Graphics. |
|
Uitools |
Graphical user interface tools. |
Interfata de aplicatii program a MATLAB-ului (API) este o biblioteca care permite scrierea de programe în C sau Fortran care interactioneaza cu MATLAB-ul. Include facilitati pentru apelarea rutinelor din MATLAB, apelarea MATLAB-ului ca masina de calcul, scrierea si citirea fisierelor de tip .MAT .
Pentru limbajul MATLAB avem prevazut un compilator cu ajutorul caruia putem construi aplicatii executabile, dar care nu sunt concepute pentru executie în timp real.
3.2.2 Simulink
Simulink este un pachet software pentru modelarea, simularea si analiza sistemelor dinamice. Acest mediu accepta sisteme liniare si neliniare modelate în timp continuu sau discret sau un hibrid care reunete tipurile de mai înainte. Sistemele pot fi cu mai multe perioade de esantionare, adica au diferite parti componente care sunt esantionate sau au iesirile calculate la diferite intervale de timp.
Pentru modelare, Simulink furnizeaza o interfata grafica cu utilizatorul (GUI) pentru construirea modelelor sub forma de diagrame-bloc, folosind operatii simple executate cu ajutorul mouse-ului. Folosind aceasta interfata se pot desena modele asa cum am face daca am desena schemele bloc clasice din automatica sau asa cum le întâlnim în literatura de specialitate. Acesta este un avantaj major fata de celelalte pachete de simulare care cereau implementarea ecuatiilor diferentiale sau ecuatiilor cu diferente într-un limbaj specific programului. Simulink include o biblioteca de blocuri completa care include surse, destinatii, componente liniare sau neliniare precum si elemente de conectare.
De asemenea se pot crea sau modifica blocuri proprii sub forma asa-numitelor S-functii (S-functions, System functions
Modelele sunt ierarhizate, deci se pot construi modele folosind o abordare de la simplu la complex (bottom-up) sau invers (top-down). Aceasta abordare ne permite sa vedem într-un mod simplu si intuitiv cum este organizat modelul si cum interactioneaza subsistemele între ele. Dupa ce se defineste modelul el se poate simula alegând o anumita metoda de integrare fie din meniul Simulink fie introducând o comanda explicita în fereastra de comanda MATLAB.
Aceste meniuri sunt convenabile în mod special pentru o activitate interactiva, pe când linia de comanda este foarte utila pentru simulari repetate folosind spre exemplu variatia unor parametri în anumite domenii de variatie. Folosind osciloscoape sau alte blocuri de afisare se pot vizualiza rezultatele simularii chiar în timpul executiei sale. În plus, se pot modifica anumiti parametri si observa imediat care este efectul acestei modificari.
Rezultatele simularii pot fi stocate în spatiul de lucru MATLAB pentru postprocesare sau vizualizare.
Deoarece MATLAB si Simulink sunt integrate modelele pot fi simulate, analizate si revizuite folosind oricare dintre medii si la orice moment de timp.
1.2.3 Real Time Workshop (RTW)
Pentru a acoperi majoritatea cerintelor proiectantilor de sisteme de reglare în timp real s-a impus necesitatea deschiderii mediului MATLAB/Simulink catre elaborarea de executabile. Pe masura ce acest mediu, conceput initial pentru modelare si simulare, crestea în complexitate, s-a impus chiar necesitatea elaborarii unor aplicatii de timp real.
Pornind cu dezvoltarea sa în timp si chiar judecând dupa masura complexitatii abordarii, putem sa distingem doua posibilitati de creare de executabile:
Indiferent de ce cale abordam este necesar sa stapânim foarte bine conceptele cu care operam. Nu toate executabilele generate au acelasi grad de flexibilitate si din aceasta cauza exista mai multe posibilitati de generare de aplicatii executabile.
Daca se doreste crearea de executabile pornind de la functii MATLAB, se poate folosi Compilatorul de MATLAB mcc (MATLAB C Compiler).
Daca se prefera dezvoltarea de aplicatii executabile pornind de la un model Simulink, atunci se foloseste RTW (Real Time Workshop).
RTW reprezinta un sistem de generare automata de executabile pornind de la un model Simulink. Putem schita arhitectura acestui mediu pornind de la necesitatile utilizatorului Simulink.
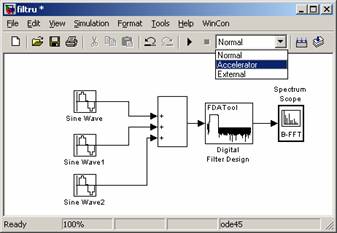
a) Simularea se desfasoara foarte lent si dorim sa acceleram procesul de simulare. Pentru rezolvarea acestui inconvenient Simulink a fost prevazut cu o "tinta" (target) inclusa în mediul respectiv, anume Accelerator
b) Daca se doreste o simulare si mai rapida a modelului, atunci se poate trece direct la compilarea sa, folosind GRT (Generic Real Time). Folosind acest target, se pot genera executabile de sine statatoare dar la care nu exista posibilitatea modificarii unor parametri ai modelului. Daca se modifica oricare dintre parametrii modelului, vom fi nevoiti sa recompilam modelul pentru simulare.
c) Daca se doreste utilizarea unui model compilat pentru a face o simulare cu parametri modificati, se utilizeaza target-ul RSIM (Rapid Simulation). Acest target creaza o interfata cu un model precompilat prin care putem sa comunicam noile valori ale parametrilor executabilului obtinut printr-o compilare anterioara. Schimbul de parametri cu executabilul se realizeaza la nivel de fisiere de date (.MAT) stocate pe disc. Simularile se pot realiza într-un ciclu în care putem modifica anumiti parametri fara a mai fi nevoie sa recompilam modelul de fiecare data.
d) Daca se doreste crearea unui executabil de timp real, atunci se poate folosi target-ul RTWIN (Real Time Windows). Acest target implementeaza un nucleu (kernel) de timp real pe nivelul zero în jurul procesorului (ring 0). Modelul Simulink este folosit drept interfata de timp real prin care parametrii simularii pot fi schimbati chiar în momentul în care executabilul de timp real se executa. În acest fel se pot observa direct "pe instalatie" efectele modificarii anumitor parametri.
|
