Modelarea matematica a fenomenului mecanic (efectului mecanic)
1. Modelul matematic al fenomenului (efectului) mecanic
Conform definitiei date anterior, fenomenul mecanic reprezinta acel tip de fenomen din universul macroscopic ce are ca rezultat modificarea in timp a pozitiei (starii mecanice) a sistemului mecanic considerat.
Odata modelate matematic spatiul, timpul, starea mecanica si sistemul mecanic, putem modela matematic acum, conform acestei definitii, fenomenul mecanic. Astfel, dupa cum am vazut, starea mecanica a sist 353b15d emului mecanic reprezinta totalitatea coordonatelor independente ce descriu pozitia acestuia intr-un reper stabilit:
|
|
|
Prin urmare, modificarea acestei stari in timp, adica fenomenul mecanic, va fi modelat matematic prin orice tip de variatie a acestor coordonate.
Discutie:
Pana aici, pe baza informatiilor directe furnizate de simturile noastre nu putem impune functiilor q decat conditia de continuitate pe domeniul lor de definitie.
Vom vedea in capitolul urmator ca implementarea observabilelor mecanice in modelul pe care tocmai il construim va impune acestor functii conditii suplimentare: este necesar ca functiile q sa fie de clasa C2, adica derivabile de doua ori si cu derivate continue (pentru a se putea defini notiunile de viteza si acceleratie momentane).
2. Fenomene (efecte) mecanice directe (manifeste)
si indirecte (nemanifeste, legaturi)
Experienta ne arata ca interactiunile mecanice pot conduce la fenomene mecanice modelate matematic prin doua tipuri de modificari ale coordonatelor sistemelor ce interactioneaza:
a) fenomene mecanice directe (manifeste): sunt modelate matematic prin variatia sau nu a unora din coordonatele sistemului in raport cu timpul.
De exemplu, prin actiunea mecanica directa si centrala asupra unei bile izolata mecanic pana in acel moment, aceasta se va deplasa pe directia actiunii; daca aceasta actiune este indreptata pe Ox, evident ca se va modifica doar coordonata x a bilei, celelalte ramanand neschimbate; spunem ca avem translatie a bilei pe aceasta axa. Daca aplicam bilei inca o actiune mecanica directa egala si de sens opus primei, atunci cele doua actiuni se vor anula reciproc, inregistrandu-se - asa cum vom vedea - tot un fenomen mecanic manifest, numit echilibru mecanic al bilei, caracterizat (modelat) prin constanta in timp a coordonatelor acesteia.
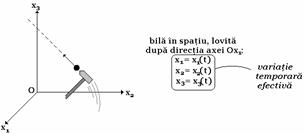
Fig. 16
b) fenomene mecanice indirecte (nemanifeste, legaturi): sunt modelate matematic prin aparitia unor relatii intre coordonatele sistemului
De exemplu, daca bila anterioara se afla pe o masa plana, atunci, deplasarea ei prin aplicarea fortei nu va mai fi arbitrara ci se va face obligatoriu in planul mesei. Acest lucru face ca in orice moment coordonatele sale sa satisfaca ecuatia planului ce modeleaza matematic masa respectiva. Prin urmare, actiunea mecanica a mesei asupra bilei s-a concretizat matematic prin relatia de dependenta functionala ce apare intre coordonatele bilei fata de situatia anterioara in care nu actioneaza decat forta.
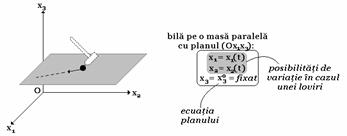
Fig. 17
Discutii:
In general, sistemele mecanice sunt supuse simultan la interactiuni ce determina fenomene complexe, constand in suprapunerea simultana a fenomenelor mecanice directe si indirecte (cazul bilei de pe masa, lovita efectiv). Ca urmare, in modelul matematic general, vom avea - asa cum vom vedea, atat dependente temporale ale coordonatelor sistemului mecanic, cat si relatii de dependenta intre acestea.
In cazul fenomenelor mecanice indirecte, atunci cand avem de-a face cu relatii de dependenta intre coordonate, acestea vor conduce, tocmai prin modul lor de definire, la reducerea numarului de parametri independenti de stare mecanica, deci la reducerea gradelor de libertate ale sistemului mecanic.
Prin urmare, modelul matematic al fenomenului mecanic va fi:
|
fenomen mecanic direct: |
|
|
fenomen mecanic indirect
(legatura): |
|
|
fenomen mecanic general: |
|
unde avem urmatoarele notatii si denumiri noi:
![]() - conditia
initiala = starea mecanica a sist 353b15d emului mecanic in momentul
declansarii interactiunilor mecanice exterioare (momentul initial to);
- conditia
initiala = starea mecanica a sist 353b15d emului mecanic in momentul
declansarii interactiunilor mecanice exterioare (momentul initial to);
![]() - totalitatea parametrilor mecanici de stare derivati
(altii decat coordonatele
- totalitatea parametrilor mecanici de stare derivati
(altii decat coordonatele ![]() ale sistemului mecanic - viteze acceleratii impulsuri
etc. );
ale sistemului mecanic - viteze acceleratii impulsuri
etc. );
simbolul (*) utilizat in relatiile de mai sus poate fi, dupa caz, unul din urmatoarele simboluri algebrice oprationale: < >
Definitia generala a legaturilor, prin forma ei, conduce la cateva clasificari ale acestora cu suport distinct in realitate, care devanseaza cu putin notiunile introduse pana acum (se vorbeste despre viteza, ca parametru derivat explicit):
dupa valoarea simbolului *:
legaturi unilaterale: daca (*)
legaturi bilaterale: daca (*) = (=)
dupa cum apar sau nu parametri derivati in egalitati:
legaturi olonome (geometrice, finite): ![]() nu apar explicit in
aceste relatii
nu apar explicit in
aceste relatii
legaturi neolonome: ![]() apar explicit in
aceste relatii
apar explicit in
aceste relatii
legaturi cinematice (diferentiale): daca apar explicit numai vitezele
dupa cum timpul apare sau nu explicit in egalitati:
legaturi scleronome: t nu apare explicit in aceste relatii
legaturi reonome: t apare explicit in aceste relatii.
3. Fenomene (efecte) mecanice directe modelabile matematic.
Fenomene (efecte) mecanice elementare
De remarcat ca, in cazul general, un fenomen mecanic direct (manifest) este foarte complicat, ceea ce se reflecta si asupra modelului sau matematic, adica asupra functiilor ce il modeleaza. In foarte putine cazuri acestea exista concret. Miscarea mecanica a unui sistem mecanic real este imposibil de modelat matematic, fiind imposibil de gasit functii analitice (a caror expresie sa poata fi scrisa) care sa corespunda, conform modelului creat, miscarii reale.
Ca urmare, fenomenele mecanice directe (manifeste) nu pot fi studiate pe cazul general, ci doar pe anumite cazuri simple, ideale, ce pot fi reduse la suprapuneri de asa-numite fenomene mecanice elementare.
Sa vedem, in continuare, care sunt aceste fenomene elementare. Un prim fenomen elementar este acela in care care toate coordonatele sistemului mecanic sunt constante in timp, fenomen numit echilibru mecanic sau repaus.
Apoi, pentru restul situatiilor, sa observam ca putem avea doua mari categorii de coordonate ce definescc starea mecanica, variatia numai a celor dintr-o categorie delimitand cele doua mari clase de fenomene elementare cunoscute:
coordonate liniare variatia acestora modeleaza miscarea sistemului mecanic de-a lungul unei directii, miscarea numita translatie de-a lungul directiei respective;
coordonate unghiulare variatia acestora modeleaza miscarea sistemului in jurul unei axe, miscare numita rotatie in jurul axei respective.
Putem afirma acum ca simplele cazuri de fenomene mecanice modelabile matematic la care ne-am referit anterior, ce reprezinta suprapuneri ale celor elementare, sunt asa-numitele rototranslatii, in care sistemul are o miscare complexa care se poate descompune in translatii de-a lungul unor anumite directii si rotatii in jurul unor anumite axe. In modelul matematic al acestor fenomene simple vor varia numai acele coordonate corespunzatoare acestor miscari elementare.
Discutie
Deformatiile mediului continuu deformabil sunt reductibile prin simplificarile ce teoretizeaza in prezent aceste tipuri de fenomene mecanice, tot la rototranslatii, cu caracter local.
|