Proiectarea instalatiei mecanice
Proiectarea se va face urmarindu-se algoritmul:
Calculul elementelor diagramelor cinematice.
Calculul contragreutatii.
Alegerea cablurilor de tractiune.
Calculul principalelor dimensiuni ale rotii de frictiune.
Calculul diagramei cuplului static pentru urcarea si coborarea cabinei pline si cabinei goale.
Alegerea troliului electric de actionare.
Date de intrare:
Pentru proiectarea actionarii ascensorului sunt necesare urmatoarele date de intrare:
sarcina utila: Qu =400 daN;
viteza nominala: vN=1 m/s;
socul maxim: smax=1,6 m/s3;
inaltimea de ridicare: H=27m;
forma de variatie a acceleratieila pornire si oprire: ap, ad sinusoidal;
greutatea cabinei goale: Ge=400 daN;
numarul cablurilor de tractiune: n=3 (se impune: n ≥ 2 din criterii de siguranta);
distantele intre punctele de incastrare a glisierelor L=0,4 m
Date de iesire:
Prin aplicarea algoritmului se obtin date referitoare la:
elementele diagramelor cinematice;
greutatea contrgreutatii;
tipul cablului de tractiune;
dimensiunile rotii de frictiune;
puterea motorului electric de actionare;
. Calculul elementelor diagramelor cinematice
Diagramele cinematice reprezinta variatia unor marimi functional in functie de drum pentru un ciclu tipic de functionare al ascensorului:
Pentru a asigura confortul necesar, in transportul de persoane se limiteaza variatia acceleratiei la valori pe care experienta si cercetarea medicala le recomanda. Definim socul drept derivata acceleratiei si il notam cu s:
Sistemul de actionare al ascensorului este un sistem de pozitionare, cabina plecand dintr-un punct bine determinat, (nivelul etajului de start) si trebuind sa opreasca exact in fata usii nivelului tinta (nivelul etajului de oprire). Eroarea de pozitionare nu poate fi mai mare de cativa mm, ceea ce la o cursa de opt etaje inseamna o eroare inferioara limitei de 0,5%!
Intr-un sistem de pozitionare este foarte important profilul vitezei pentru o cursa, deoarece el asigura pe de-o parte comfortul clientilor, iar pe de alta parte impune sarcini clare sistemului de actionare si comanda.
Doua marimi care determina profilul de viteza: acceleratia maxima (notata in continuare Am) si valoarea limita a derivatei acceleratiei, socul (notat in continuare s). Variatia in timp a socului, acceleratiei, vitezei, distantei parcurse, a cuplului motor necesar, constituie diagramele de drum sau graficele de miscare ale ascensorului studiat.
Legile generale care guverneaza evolutia marimilor in diversele etape sunt:
![]()
Se calculeaza elementele diagramelor cinematice pentru forma de variatie a acceleratiei impusa sau adoptata:
Pentru variatie sinusoidala a acceleratiei rezulta:
a) la pornire
ap(t) = Amaxsin (1)
(1)
Determinarea timpului de pornire tp si a amplitudinii acceleratiei se face cunoscand ca:
 (2)
(2)
 (3)
(3)
Si conditiile:
![]()
![]() sau:
sau: ![]()
![]()
Amax = +0,89 m/s2
tp = 1,76 s
Spatiul parcurs la pornire:
![]() (4)
(4)
Cu conditia la limita hp(0) = 0 rezulta h0, p = 0 si
 (5)
(5)
hp(tp) = Hp
Hp = 0,878 m.
b) la oprire (decelerare)
ad(t) = - Amaxsin (6)
(6)
Determinarea timpului de decelerare td si a amplitudinii deceleratiei se face, ca si in cazul pornirii, cunoscandu-se ca:
 (7)
(7)
 (8)
(8)
In acest caz, conditiile la limita sunt:
![]()
![]() sau:
sau: ![]()
![]()
Amax = + 0,89 m/s2
td = 1,76 s
Spatiul parcurs la oprire este egal cu spatiul parcurs la pornire Hd = Hp.
c) in regim stationar
ramane de parcurs, cu viteza ![]() , spatiul:
, spatiul:
Hs = H 2Hp = H 2Hd, (9)
iar miscarea dureaza :
ts = ![]() (10)
(10)
Hd = 0,878 m
Hs = 25,244 m
ts = 25,244 s
Regim
stationar t ![]() [1,76; 27,004]
[1,76; 27,004]
|
t |
|
|
|
|
|
|
|
s(t) |
|
|
|
|
|
|
|
a(t) |
|
|
|
|
|
|
|
p(t) |
|
|
|
|
|
|
|
h(t) |
|
|
|
|
|
|
5.2. Calculul numarului maxim de conectari
Numarul maxim de conectari pe ora este necesar la alegerea motorului de actionare si se calculeaza estimativ considerandu-se comenzile succesive (fara pauze) si cursa maxima a ascensorului.
nc = ![]() (11)
(11)
nc = 133,33 conectari/ora
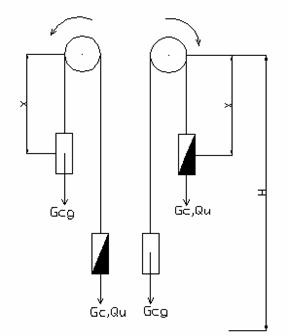
5.3 Calculul contragreutatii
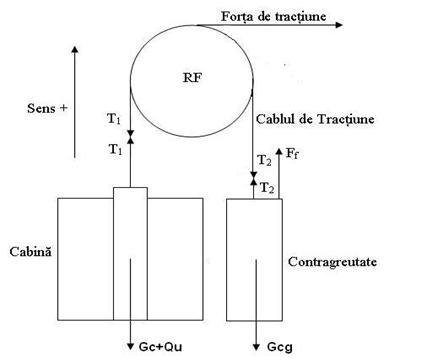
Fig. 5.3.1
Au fost utilizate notatiile:
RF Roata de frictiune,
Gcg Greutatea contragreutatii,
Gc Greutatea cabinei,
Qu Sarcina utila,
Ff Forta de frecare echivalenta,
T1,2 Tensiunile din fir,
Se calculeaza greutatea contragreutatii
Gcg = k1Qu + Gc (12)
Unde k1 este un coeficient de echilibrare care se afla in mod normal intre limitele ke
k1 = 0,55
Gcg = 620 daN
5.4. Calculul fortei de frecare
Se izoleaza RF din structura cinematica si se obtin urmatoarele reprezentari:
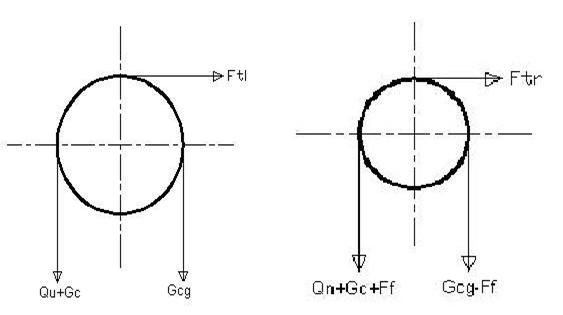
a) cazul ideal b) cazul real
Fig. 5.4.1
Se considera randamentul putului definit cu ajutorul fortei de tractiune ideala si a fortei echivalente de frecare. Deoarece forta de frecare nu apare numai la cabina, dar nici nu cunoastem distribuirea ei se va considera ca forta de frecare echivalenta se imparte in mod egal intre cabina si contragreutate.
Se defineste randamentul putului liftului (ηp) ca fiind :
![]() (13)
(13)
Unde:
![]() - forta de tractiune
ideala
- forta de tractiune
ideala
![]() - forta de tractiune reala.
- forta de tractiune reala.
La echilibrul pentru fiecare dintre cele 2 cazuri putem scrie:
a) Forta de tractiune ideala dezvoltata de roata de frictiune in timpul deplasarii in sus cu cabina incarcata la maximum si viteza constanta este:
![]() (14)
(14)
b)
![]() (15)
(15)
![]() (16)
(16)
Din (13) se alege ηp = 0.6
![]() (17)
(17)
Fti=180 daN
Ftr=300 daN
Ff=60 daN
5.5. Alegerea cablurilor de tractiune
Se calculeaza solicitarea la intindere a cablului:
Avand valoarea fortei de frecare se poate calcula tensiunea maxima din cablurile aflate intre roata de frictiune si cabina:
![]() (18)
(18)
![]() (19)
(19)
Unde:
Mc - masa cabinei [kg]
QN - masa utila [kg]
Tensiunea maxima se distribuie pe ncp cabluri legate in paralel. De regula ncp 3. Numarul cablurilor in paralel influenteaza constructia coroanei rotii de frictiune, asa ca recomandarile trebuie respectate in general. In acest caz sarcina teoretica maxima dintr-un cablu este:
![]() (20)
(20)
Aceasta sarcina maxima se inmulteste cu un coeficient de siguranta pentru a calcula efortul de dimensionare a cablului. In transportul de persoane se iau masuri severe de siguranta asa ca acest coeficient de siguranta este la prima vedere exagerat: ksig
![]() (21)
(21)
Qlmax = 916 daN
Qmax = 305,3 daN
Qr = 4580 daN
Cablul ales este alcatuit din 6 toroane a cate 19 fire de otel fiecare. Intre cele 6 toroane rasucite se afla un material textil capabil sa retina substantele lubrifiante utilizate la intretinerea cablurilor.
Se alege, in functie de constructia cablului si solicitarea la intindere, diametrul nominal al cablului de tractiune, d [mm]. In functie de acesta mai rezulta si alte acracteristici caracteristici (anexa1):
- aria sectiunii cablului, S [mm2];
- diametrul sarmei, ds [mm];
- greutatea specifica a cablului, γc [N/m];
- sarcina teoretica de rupere a cablului: σt [daN] pentru o rezistenta la tractiune a sarmei σr [daN/mm2].
Cablul ales este alcatuit din 6 toroane a cate 19 fire de otel fiecare. Intre cele 6 toroane rasucite se afla un material textil capabil sa retina substantele lubrifiante utilizate la intretinerea cablurilor.

Fig.5.5.1 Sectiunea unui cablu cu 6 toroane a cate 19 fire.
d = 11 mm
S = 43,96 mm
ds = 0,7 mm
γc = 0,42 kg/m
σt = 5280 daN
σr = 120 daN/mm2
Se calculeaza masa cablului cu relatia :
Gcablu = ![]() (22)
(22)
Gcablu=11.1 da
5.6. Calculul dimensiunilor rotii de frictiune
5.6.1. Se calculeaza diametrul de divizare al rotii de frictiune
D ≥ 40 d (23)
unde: d este diametrul cablului de tractiune.
Relatia
indicata contine conditia de a nu solicita la obseala
cablul de tractiune. Rotile cu diametre mai mari de 200 mm se
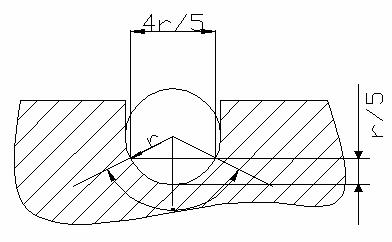
executa cu canale semicirculare (fig. 5.6.1).
Fig.5. 6.1. Canal semicircular pentru roti cu diametrul mai mare de 200 mm.
5.6.2. Verificarea conditiei de alunecare
![]() k3 k4 ≤ efα (24)
k3 k4 ≤ efα (24)
in care :
α este unghiul de infasurare a cablului pe roata [rad];
F1, F2 − fortele statice care apar de o parte si de alta a rotii de frictiune in urmatoarele situatii (fig. 5.6.2):
a) cabina situata la partea cea mai de jos, cu 125% din sarcina nominala
F1 = 1,25Qu + Gc + Gcablu (25)
F2 = Gcg
b) cabina situata la nivelul cel mai de sus, fara sarcina
F1 = Gc
F2 = Gcg + Gcablu (28)
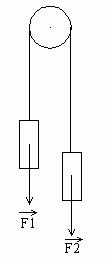
Fig. 5.6.2. Fortele statice care apar de o parte si de alta a rotii de frictiune
k3 seprezinta coeficient ce tine seama de solicitǎrile dinamice ce apar in timpul regimului tranzitoriu
k3 = ![]() , (29)
, (29)
in care :
g este acceleratia gravitationala ;
a − acceleratia maxima a cabinei la pornire si la oprire;
k4 − coeficient ce tine seama de variatia profilului canalului rotii de frictiune, datorita uzurii;
k4 = l pentru canale semicirculare cu uluc;
k4 = 1,2 pentru canale trapezoidale;
f coeficient de frecare a cablului in canalele rotii pentru canale trapezoidale
f = ![]() (30)
(30)
unde δ este unghiul dintre laturile neparalele ale trapezului (fig. 6.3, a)
 (31)
(31)
μ0 - coeficient de frecare ce tine seama de natura materialului rotii;
= 0,1 pentru fonta cenusie;
= 0,084 pentru fonta maleabila.
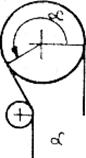
fig. 5.6.3a) fig. 5.6.3b)
canal trapezoidal unghiul de infasurare
D=600mm ≥ 440mm
a) cabina situata la partea cea mai de jos
F1=911,1 daN
F2=620 daN
k3=1,31
k4=1
![]() =2100=3,665rad
=2100=3,665rad
f=0,272
![]() k3 k4=1,92
k3 k4=1,92
efα =2,706 => ![]() k3 k4 ≤ efα
k3 k4 ≤ efα
b) cabina situata la nivelul cel mai de sus
F1=400 daN
F2=631,1 daN
k3=1,31
k4=1
![]() =2100=3,665rad
=2100=3,665rad
f=0,272
![]() k3 k4=0,83
k3 k4=0,83
efα =2,706 => ![]() k3 k4 ≤ efα
k3 k4 ≤ efα
5.7. Calculul diagramei cuplului static
5..7.1. Se calculeaza diagrama cuplului static ms = f(t) pentru urmatoarele
cazuri (fig.5.7
fig. 7.1 Calculul diagramei cuplului static
a) urcarea cabinei pline
ms(t) = ![]() [Gc + Qu Gcg + nγc(H
2x)]; (32)
[Gc + Qu Gcg + nγc(H
2x)]; (32)
b) urcarea cabinei goale
ms(t) = ![]() [Gc Gcg + nγc(H
2x)]; (33)
[Gc Gcg + nγc(H
2x)]; (33)
c) coborarea cabinei goale
ms(t) = ![]() [Gc Gcg - nγ(H 2x)]; (34)
[Gc Gcg - nγ(H 2x)]; (34)
d) coborarea cabinei pline
ms(t) = ![]() [Gc + Qu Gcg - nγ(H
2x)]; (35)
[Gc + Qu Gcg - nγ(H
2x)]; (35)
Pentru calculul diagramei ms = f(t) se utilizeaza expresiile lui h(t) de la pasul l, pe intervale, in functie de tipul diagramei acceleratiei. Pe fiecare din aceste intervale se calculeaza cuplul static mediu.
 (36)
(36)
![]()
5.7.2. Se calculeaza cuplul static mediu pentru un ciclu de functionare
 (37)
(37)
sau
 (38)
(38)
|
|
t1 |
t2 |
t3 |
t4 |
t5 |
t6 |
|
turcare |
|
|
|
|
|
|
|
tcoborare |
|
|
|
|
|
|
|
h(t) |
|
|
|
|
|
|
a) urcarea cabinei pline
ms(t1) = 549.53Nm
ms(t2) = 545.73Nm
ms(t3) = 541.91Nm
ms(t4) = 538.09Nm
ms(t5) = 534.27Nm
ms(t6) = 534.27/m
![]() =539Nm
=539Nm
b) urcarea cabinei goale
ms(t1) = 669.54Nm
ms(t2) = 665.72Nm
ms(t3) = 661.91Nm
ms(t4) = 658.09Nm
ms(t5) = 654.27Nm
ms(t6) = 650.47Nm
![]() =656.13Nm
=656.13Nm
c)coborarea cabinei goale
ms(t1) = 650.45Nm
ms(t2) = 654.27Nm
ms(t3) = 658.09Nm
ms(t4) = 661.91Nm
ms(t5) = 665.72Nm
ms(t6) = 669.54Nm
![]() =658.51Nm
=658.51Nm
d) coborarea cabinei pline
ms(t1) = 529.86Nm
ms(t2) = 534.27Nm
ms(t3) = 538.09Nm
ms(t4) = 541.91Nm
ms(t5) = 545.73Nm
ms(t6) = 549.53Nm
![]() =536.5Nm
=536.5Nm
Cuplul static mediu pentru un ciclu de functionare:
![]() =657.32
=657.32
5.8. Alegerea troliului electric de actionare
5.8.1. Se calculeaza puterea statica medie :
Cunoscand valoarea cuplului echivalent se calculeaza puterea de tip a motorului considerand viteza nominala de rotatie viteza unghiulara a rotii de frictiune corespunzatoare vitezei maxime.
Ps med = Ms, med · Ωmax (39)
Ωmax = ![]() (40)
(40)
Aceasta putere servese la alegerea motorului de antrenare indiferent de felul sau (de c.c., asincron sau sincron cu magneti permanenti) deoarece relatia Ptype a fost obtinuta din datele impuse ascensorului, fara a particulariza rationamentul. La alegerea motorului din cataloagele de masini electrice se va tine cont de specificarea din caietul de sarcini privind actionarea directa sau cu transmisie mecanica.
Se alege, in functie de serviciul tip stabilit, un motor cu puterea nominala
PN ≥ 1,2)Ps med (41)
Ωmax=3.34 rad/s
Ps med=2195,45 W
PN≥2634,53 W
Se alege:
 Troliu Alberto Sassi model GEKO 3.3kW
Troliu Alberto Sassi model GEKO 3.3kWDatele tehnice ale troliului :
viteza 1m/s
2 viteze
sarcina statica maxima 2400 kg
raport 1/45
numar de actionari 180 actionari/ora
diametru roata tractiune 600 mm
numar canale roata tractiune 4 canale
diametru cablu 11 mm
tensiune 400v
putere 3.3 kw
electromagnet frana 48 v c
Fig.5.8.1 Troliu Alberto Sassi GEKO 3.3kW
|
