Sisteme tentaculare
13.1 Introducere
Configuratiile conventionale de roboti sunt mecanisme discrete obtinute prin legarea în cascada a unor corpuri rigide articulate obtinute printr-o conexiune cu un singur grad de libertate. Mecanismul acestor structuri presupune existenta unor relatii cunoscute între centrele de greutate ale corpurilor articulate iar articulatiile sunt controlate prin legi de conducere proprii. Elementele lantului cinematic sunt formate din componente pasive, activarea fiind realizata numai la nivelul articulatiei.
În contrast cu structuri clasice, modelele de tip "tentacul", "trompa", "serpentina" sunt realizate prin conexiunea în serie a unor elemente a caror miscare de încovoiere (rotatie) este realizata dupa curbe continue. Aceasta ultima caracteristica desemneaza aceasta clasa de roboti ca "roboti continui", în timp ce structurile conventionale sunt considerate ca "roboti discreti" [1].
Modelele de tip tentacul sunt formate, teoretic, dintr-un numar infinit de articulatii, ceea ce permite obtinerea unui lant cinematic descris printr-o curba continua si îi confera o mobilitate, ipotetic, infinita. Din acest motiv în multe lucrari [2, 5] aceste modele sunt desemnate si ca modele "hiperredundante". Marea lor mobilitate face ca acesti roboti sa fie utilizati cu precadere în spatii de operare cu restrictii deosebit de severe.
Figura
13.1 Model discret - model continuu
În
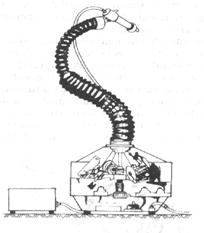
acest fel se pot manipula piese, se pot realiza operatii de vopsire,
sudura, eliminarea unor imperfectiuni tehnologice în zone greu
accesibile, containere închise, constructii tabulare, etc. (figura 13.2).
Figura 13.2 Model tentacular - aplicatii în spatii cu restrictii
Proiectarea si realizarea unui sistem de tip tentacul ridica probleme complexe printre care am putea mentiona:
Dificultatea actionarii distribuite pe lungimea sistemului. Este evident ca o actionare electrica de tip clasic este inacceptabila datorita greutatii suportului magnetic. Mult mai pretabile pot fi actionarile de tip pneumatic, hidraulic sau cele care utilizeaza componente tehnologice noi, materiale inteligente de tip SMA, lichide ER, muschi artificiali din polimeri, etc.
Masurarea pozitiilor relative sau absolute a articulatiilor ridica probleme extrem de complexe. În noul curent se accepta masurarea unor puncte discrete, restul punctelor fiind obtinute prin proceduri speciale de estimare.
Dificultatea determinarii unei legi de miscare pentru întreaga configuratie avându-se în vedere complexitatea modelului matematic al tentaculului si al complicatiilor ce apar la implementarea unui controler distribuit.
13.2 Modele "tentacul"
Modele cu actionare intrinseca, la care sistemele de actionare se gasesc chiar în structura corpului elementelor si constituie o componenta a mecanismului de animatie.
Modele cu actionare extrinseca în care elementul activ este pozitionat în afara structurii bratului iar miscarea este realizata printr-un mecanism de transfer (cabluri, fire, etc).
Modele hibride care utilizeaza ambele sisteme.
Fiecare dintre aceste grupe poate fi subdivizat în modele planare sau spatiale dupa cum miscarea se produce într-un plan specificat, sau în aria directiei din spatiu, respectiv.
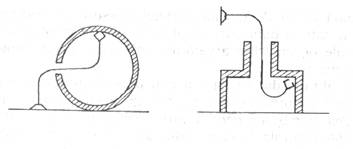
13.2.1 Sisteme cu actionare intrinseca
Cea
mai simpla forma de actionare intrinseca este obtinuta
din dispozitive planare fluidice de tipul celor prezentate în figura 13.3.
Figura 13.3 Dispozitiv intrinsec planar
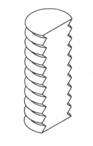
Figura 13.4 Model intrinsec spatial
O schema simplificata a miscarii este prezentata în figura
13.5. Pentru a obtine o anumita directie de rotatie se
impune controlul strict al presiunii în cele trei camere ale cilindrilor. O
structura tentaculara completa este obtinuta prin
legarea în serie a câtorva module. Este evident ca, prin controlul
distribuit al lantului de module, se obtine orientarea în spatiul 3D
si flexibilitatea formei întregii structuri.
Figura 13.5 Miscarea modelului cu actionare spatiala
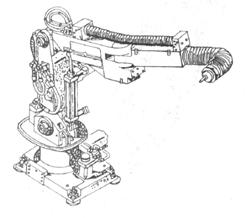
Figura 13.6 Robotul NOBEL MEC
O structura industriala cu actionare intrinseca, hidraulica, este oferita de terminalul robotului NOBEL MEC (figura 13.6). Fiecare element este actionat de un servosistem, comanda centralizata a acestora permitând miscarea bratului într-un singur plan.
Figura 13.7 Model cu actionare prin lichide ER.
Evident, miscarea si orientarea este realizata prin controlul presiunii fluidului, dar ulterior, controlul vâscozitatii asigura o buna stabilitate a miscarii.
13.2.2 Sisteme cu actionare extrinseca
Pentru
aceste sisteme sursa motoare se gaseste pozitionata în
afara structurii flexibile a bratului, actionarea fiecarui
element si modul realizându-se prin diverse modalitati de
transmisie. Cel mai cunoscut sistem de transmisie este cel realizat pe
baza de cabluri tractate electric sau hidraulic. În figura 13.8 este
prezentat robotul ACMA la firmei Renault al carui terminal cu functie
tentacul-trompa este utilizat în instalatiile de vopsire automata.
Elementele flexibile sunt grupate în module, fiecare modul fiind activat
printr-un sistem de cabluri astfel dispuse încât sa asigure o distributie
uniforma a fortei de-a lungul bratului. (figura 13.9). În cadrul
fiecarui modul, elementele flexibile sunt pasive.
Figura 13.8 Robotul ACMA-Renault.
Figura 13.9 Modelul cu tractare pe cabluri
Un
robot reprezentativ al acestei familii este robotul HB-Hitachi (figura 13.10)
utilizat în operatii de vopsire si grunduire. Robotul este utilizat
din doua tronsoane cu actionare electrica independenta.
Fiecare tronson este format dintr-un numar de elemente - vertebre a
caror miscare este ghidata de-a lungul unor suporturi elastice
printr-o tractare cu cabluri. Vertebrele au o forma specifica astfel
încât sa permita o mobilitate
la cca 150 una fata de cealalta, în orice directie.
Figura 13.10 Robotul HB-Hitachi.

În
cadrul laboratorului de Robotica al Universitatii din
Figura 13.11 Modelul TEROB-01.
Modelul TEROB-02 (figura 13.12) este un robot al carui brat cuprinde opt elemente articulate prin cuple sferice ceea ce asigura o mare mobilitate întregii structuri mecanice. Comanda robotului se realizeaza prin gruparea elementelor în doua tronsoane, activarea fiecarui element fiind actionata individual prin cabluri actioanate cu motoare pas cu pas ceea ce faciliteaza procedurile de generare a comenzii si simplifica sistemul de comanda prin eliminarea traductoarelor de reactie.
Figura 13.12 Modelul TEROB-02
Modelul
TEROB-03 este un robot cu actionare electrohidraulica format din trei
module, fiecare continând 12 elemente de rotatie cu doua grade
de libertate. Actionarea hidraulica este suficient de puternica
pentru dezvoltarea unor functii de manipulare cu sarcini de 1,5 daN..
Figura 13.13 Modelul TEROB-03
13.3 Modelul cinematic
Pentru analiza cinematica a acestor sisteme, se va considera un brat tentacul ideal, cu o masa uniform distribuita, cu o flexibilitate ideala în sensul ca bratul poate lua orice forma în spatiul 3D (figura 13.14.).
Figura 13.14 Model ideal
Tehnologic, o astfel de structura presupune existenta unei "coloane verte-brale" cu celule periferice care pot determina, printr-o actionare intrinseca sau extrinseca, forma dorita a bratului.
În
esenta, din punct de vedere cinematic, un model tentacular este
definit printr-o curba C care este descrisa parametric printr-un
vector ![]() si un sistem de
referinta asociat definit prin matricea
si un sistem de
referinta asociat definit prin matricea ![]() ale carei coloane
reprezinta versorii sistemului (figura 13.15). Parametrul independent s
reprezinta lungimea arcului de la origine pâna în punctul curent P.
Se va considera ca lungimea totala a bratului pe curba C este l.
ale carei coloane
reprezinta versorii sistemului (figura 13.15). Parametrul independent s
reprezinta lungimea arcului de la origine pâna în punctul curent P.
Se va considera ca lungimea totala a bratului pe curba C este l.
Pozitia unui punct s pe curba C este definita prin vectorul de pozitie
![]() (13.1)
(13.1)
unde ![]() . În cazul unei evolutii dinamice, se va introduce
variabila temporala t,
. În cazul unei evolutii dinamice, se va introduce
variabila temporala t, ![]() .
.
Parametrizarea curbei C va fi realizata
prin doua unghiuri ![]() si q(s). Pentru
fiecare punct
si q(s). Pentru
fiecare punct ![]() , orientarea robotului este data de un sistem vectorial
ortonormat
, orientarea robotului este data de un sistem vectorial
ortonormat ![]() cu originea în punctul
cu originea în punctul
![]() . Pe întrega structura a curbei C se poate defini o
parametrizare sub forma:
. Pe întrega structura a curbei C se poate defini o
parametrizare sub forma:
![]() (13.2)
(13.2)
 (13.3)
(13.3)
unde ![]() ,
, ![]() , etc.
, etc.
Pentru o variatie infinit mica ds în lungul curbei C, noul vector de pozitie va fi:
![]() (13.4)
(13.4)
iar
matricea ![]() va avea forma:
va avea forma:
![]() (13.5)
(13.5)
Vectorul de
pozitie ![]() poate fi exprimat
si prin componentele sale:
poate fi exprimat
si prin componentele sale:
![]()
![]()
![]()
unde ![]() .
.
Figura 13.15 Versorii sistemului de referite
Din punct
de vedere cinematic, se poate adopta deci urmatoare interpretare [4]: în
orice punct definit de variabila s,
relatiile (13.3)- (13.6) determina pozitia curenta,
matricea ![]() contine
orientarea robotului iar forma robotului este determi-nata de
functiile
contine
orientarea robotului iar forma robotului este determi-nata de
functiile ![]() si q(s).
si q(s).
Modelul dinamic al bratului ideal
Se va reconsidera un model tentacul idealizat, flexibil, în care vor fi neglijate frecarile si amortizarile interne. Se vor neglija efectele sectiunii asupra dinamicii bratului.
În conformitate cu elementele prezentate în paragrafele anterioare, pozitia unui punct curent M, la momentul t, aflat la distanta s de originea bratului, va fi descris în spatiul 3D de un vector pe curba C asociata,
![]() ,
, ![]() (13.7)
(13.7)
Figura 13.16
![]()
unde:
![]()
![]()
![]()
![]()
cei doi
parametri unghiulari ![]() si q(s,t) determina forma
bratului si asigura pozitionarea corespunzatoare a
elementului terminal
si q(s,t) determina forma
bratului si asigura pozitionarea corespunzatoare a
elementului terminal
![]()
![]()
![]()
Analiza dinamica a sistemului impune introducerea elementului de masa dm astfel:
![]() (13.11)
(13.11)
unde ![]() va reprezenta
densitatea de masa liniara presupusa uniform distribuita pe
lungimea bratului.
va reprezenta
densitatea de masa liniara presupusa uniform distribuita pe
lungimea bratului.
Se vor utiliza, de asemenea, urmatoarele notatii:
![]() ,
, ![]() ,
, ![]()
![]() ,
, ![]() ,
, ![]()
![]() ,
, ![]() ,
, ![]()
![]() ,
, ![]() ,
, ![]()
![]() ,
, ![]() ,
, ![]()
![]() ,
, ![]() ,
, ![]()
![]() ,
, ![]() ,
, ![]()
![]() ,
, ![]() ,
, ![]()
unde ![]() si
si ![]() vor reprezenta
fortele distribuite ce actioneaza în planurile q si
vor reprezenta
fortele distribuite ce actioneaza în planurile q si ![]() , respectiv si determina evolutia formei
bratului.
, respectiv si determina evolutia formei
bratului.
Corespunzator coordonatelor de pozitie, viteza în fiecare punct, de-a lungul bratului, va fi definita prin
![]()
unde:
![]()
![]()
Determinarea ecuatiilor de stare care guverneaza miscarea unui brat tentacular este o problema extrem de complicata. Structura continua a modelului, neliniaritatile existente, distributia fortelor si parametrilor pe lungimea bratului fac dificila aplicarea unor metode conventionale. În cele ce urmeaza se vor obtine ecuatiile de stare prin utilizarea ecuatiilor lui Lagrange extinse pentru sisteme infinit dimenisionale ceea ce impune calculul energiilor mecanice ale bratului. Pentru un element dm, energia cinetica si potentiala va fi:
![]() (13.15)
(13.15)
![]() (
(
unde:
![]()
Energiile totale ale bratului se vor obtine prin integrarea relatiilor (13.15), (13.17) cu substituirea corespunzatoare a marimilor definite prin expresiile (13.9) si (13.14),
![]()
![]()
![]() (
(
![]()
Pentru obtinerea modelului matematic se vor substitui aceste expresii în ecuatiile lui Lagrange adoptate pentru sistemele infinit dimensionale [2, 11]:
unde ![]() ,
, ![]() reprezinta derivatele partiale
functionale ( în sens Gateaux) definite ca variatia functionalei
W în raport cu
reprezinta derivatele partiale
functionale ( în sens Gateaux) definite ca variatia functionalei
W în raport cu ![]() la punctul
la punctul ![]() .
.
De exemplu, ![]() are forma urmatoare:
are forma urmatoare:

![]()
![]()
În mod similar sunt calculate si celelalte derivate partiale. Substituind aceste rezultate în ecuatiile lui Lagrange se obtine forma finala a modelului matematic,

![]()
![]()
![]()

![]()
![]()
Ecuatiile (13.23), (13.24) pot fi considerate ca ecuatii de stare ale unui brat tentacul ideal. Reamintim ca în definirea acestui model au fost neglijate frecarile si efectele amortizarilor interne. Chiar si cu aceste simplificari, ecuatiile respective reprezinta un model integro-diferential, puternic neliniar care va ridica probleme deosebite în abordarea problemelor de conducere.
În foarte multe aplicatii, atât pentru simplificarea tratarii cât si pentru abordarea unor cazuri specifice, modelul dinamic spatial 3D este înlocuit cu un model planar 2D, de exemplu pentru un robot ce opereaza în planul OYZ. În acest caz, parametrul principal este reprezentat de unghiul între tangenta la curba si axa OY,
![]() (13.25)
(13.25)
Modelul dinamic se va obtine prin particularizarea modelului (13.24)- (13.25) si va avea forma

![]()
unde F este forta generalizata ![]() ce determina modificarea formei, miscarea,
bratului în planul OYZ al variabilei q.
ce determina modificarea formei, miscarea,
bratului în planul OYZ al variabilei q.
13.5 Sistem de conducere distribuit cu lichide ER
13.5.1 Caracteristici tehnice
Se va considera un model tentacul format prin legarea în cascada a unor module de forma celor prezentate în figurile 13.17 a si b. Fiecare modul, element, poate atinge orice orientare în spatiul 3D.
Constructiv, modulele sunt de tipul intrinsec, în care miscarea de încovoiere este obtinuta prin presiunea exercitata de un fluid asupra peretilor terminali. În figura 13.18 este reprezentat un astfel de modul format dintr-un cilindru divizat în trei camere. Peretii cilindrului sunt realizati din cauciuc în care sunt integrate fibre circulare pentru asigurarea unei rigiditati a întregii structuri. Prin cresterea presiunii unei camere, cilindrul se va încovoia în partea opusa a acesteia. Un control corespunzator al presiunii în fiecare camera va determina încovoierea cilindrului în directia dorita.
În afara
controlului presiunii, sistemul contine un control suplimentar oferit de
proprietatile speciale ale lichidului utilizat. Solutia
adoptata la acest model se bazeaza pe utlizarea lichidelor
electrorheologice (ER) a caror vâscozitate poate fi controlata
printr-un câmp electric extrem de intens (~![]() ). În acest scop este introdus un circuit suplimentar de control
al potentialului electric format dintr-o retea de electrozi
distribuita la periferia cilindrului, retea supusa unui
potential uniform distribuit pe lungimea cilindrului (figura 13.19). În
functie de legea de distributie a potentialului se poate
obtine o distributie corespunzatoare a vâscozitatii
fluidului.
). În acest scop este introdus un circuit suplimentar de control
al potentialului electric format dintr-o retea de electrozi
distribuita la periferia cilindrului, retea supusa unui
potential uniform distribuit pe lungimea cilindrului (figura 13.19). În
functie de legea de distributie a potentialului se poate
obtine o distributie corespunzatoare a vâscozitatii
fluidului.
Figura 13.17 a. - un tentacul ideal 3D
Figura 13.18 Structura unui modul
Figura 13.19 Distributia vâscozitatii in modul
13.5.2 Modelul planar aproximativ
Pentru
simplificarea analizei, se va studia modelul tentacul planar (figura 13.20) ce
opereaza în planul OXZ.
Figura 13.20 Modelul planar OXZ
Se vor reconsidera ecuatiile (13.26) ale modelului dinamic planar si se va introduce o discretizare uniforma s1, s2, ...sN a variabilei spatiale s:
![]() (13.27)
(13.27)
![]() ,
, ![]() (13.28)
(13.28)
![]() (13.29)
(13.29)
si în plus, va fi admisa restrictia
![]() , i,j=1,2,...,N (13.30)
, i,j=1,2,...,N (13.30)
unde ![]() este o
este o
Din (13.26), cu restrictia (13.30) se obtine modelul discret al bratului sub forma:
![]() (13.31)
(13.31)
unde:
![]() (13.32)
(13.32)
![]() (13.33)
(13.33)
 (13.34)
(13.34)
 (13.35)
(13.35)
ON si IN sunt matricea nula si matricea identitate
de dimensiunea ![]() , respectiv, iar
, respectiv, iar ![]() si
si ![]() sunt definite prin
sunt definite prin
![]() (13.36)
(13.36)
![]()
în care D=2r este diametrul cilindrului, ![]() este factorul de
amortizare, E este modulul de
elasticitate echivalent al materialului compozit.
este factorul de
amortizare, E este modulul de
elasticitate echivalent al materialului compozit.
13.5.3 Sistemul de conducere
Sistemul
de control contine doua subsisteme: un sistem de control
conventional de tip electrohidraulic al presiunii fluidului si un
sistem de control cu structura variabila bazat pe controlul
vâscozitatii fluidului ER (figura 13.21).
Figura 13.21 Sistemul de conducere
Figura 13.22 Evolutia traiectoriilor pe planurile de comutare
Metoda de
conducere se bazeaza pe principiul sistemelor cu structura
variabila a caror evolutie este descompusa în doua
parti: miscarea pe traiectoria conventionala si
miscarea fortata pe o traiectorie în lungul dreptei de comutare.
În acest sens, evolutia complexa pe cele 2N grade de libertate este
descompusa pe N planuri definite prin parametrii ![]() , pentru fiecare plan impunându-se o anumita
dreapta de comutare (Figura 13.22).
, pentru fiecare plan impunându-se o anumita
dreapta de comutare (Figura 13.22).
Miscarea
este descompusa în doua parti: în prima parte se produce
controlul "conventional" prin controlul presiunii fluidului (segmentul de
traiectorie P0P1) iar în partea a doua, când traiectoria
penetreaza linia de comutare asociata planului, modificarea
factorului de amortizare ![]() determina
evolutia sistemului pe dreapta de comutare, direct catre origine.
Procedura se repeta pentru fiecare plan.
determina
evolutia sistemului pe dreapta de comutare, direct catre origine.
Procedura se repeta pentru fiecare plan.
Algoritmul de conducere se bazeaza pe comutarea secventiala a unui sistem cu structura variabila pe diverse submultimi. S1(e), S2(e), ..., SN(e) unde e este eroarea sistemului.
S1![]() S2
S2 ![]() S3
S3![]() ...
...![]() SN (13.38)
SN (13.38)
iar
evolutia pe o suprafata ![]() are
loc numai daca se realizeaza, în prealabil, ecuatiile pe
suprafetele predecesoare,
are
loc numai daca se realizeaza, în prealabil, ecuatiile pe
suprafetele predecesoare,
![]() ,
, ![]() , ...,
, ..., ![]()
O astfel de strategie înseamna, de fapt, descompunerea sistemului complex de ordinul 2N în N subsiteme de ordinul 2, fiecare subsistem evoluând dupa algoritmul clasic al sistemelor cu structura variabila cu dreapta de comutare.
Justificarea teoretica a unui astfel de sistem distribuit de conducere se obtine plecând de la modelul dinamic al erorii în jurul unui punct de functionare.
Se vor considera: w=col(w1, w1,...,wN) - pozitia dorita a bratului, presupusa constanta si xs, us - vectorii regimului stationar pentru stare si control, respectiv, si se va defini eroarea globala sub forma:
![]() (13.40)
(13.40)
unde:
![]() , i=1,2,...,N (13.41)
, i=1,2,...,N (13.41)
![]() (13.42)
(13.42)
![]() (13.43)
(13.43)
Modelul dinamic al erorii va fi:
![]() (13.44)
(13.44)
unde:
 (13.45)
(13.45)
Se va nota prin:
![]() (13.46)
(13.46)
iar planurile de comutatie se vor defini prin
![]() (13.47)
(13.47)
unde:
![]()
![]() ,
,![]()
![]() (13.48)
(13.48)
În prima parte a miscarii, controlul evolutiei catre o dreapta de comutare definita prin relatia (13.47) se obtine utilizând o functie Liapunov de forma:
![]()
unde P este o matrice pozitiv definita si simetrica.
Legea de conducere se obtine din ecuatia clasica a metodei a II-a a lui Liapunov [7, 8]:
![]() (13.50)
(13.50)
unde Q este o matrice pozitiv definita iar componenta neliniara are forma (13.45). [14]. Se obtine:
![]() daca
daca ![]() (13.51)
(13.51)
![]() daca
daca ![]()
unde:
![]()
![]() i=1,...,N
i=1,...,N
În momentul
în care traiectoria penetreaza dreapta de comutare Si(e), sistemul este fortat sa evolueze direct
catre origine prin controlul factorului de amortizare global ![]() . De exemplu, la comutarea legii de miscare pe prima
dreapta S1(e), evolutia erorii este data de:
. De exemplu, la comutarea legii de miscare pe prima
dreapta S1(e), evolutia erorii este data de:
![]() (13.53)
(13.53)
si stabilitatea miscarii impune ca:
![]() (13.54)
(13.54)
Din (4.5.9), (4.5.18) se obtine:
sau:
![]()
![]()
ceea ce impune ca factorul de amortizare sa verifice relatia:
![]() (13.56)
(13.56)
Conditia (13.56) determina evolutia sistemului fortat, pe dreapta de comutare S1(e), catre origine:
e1=0
![]() (13.57)
(13.57)
Dupa atingerea acestor parametrii, se controleza evolutia pe a doua suprafata de comutare:
![]() (13.58)
(13.58)
care devine:
![]() (13.59)
(13.59)
Evolutia
fortata catre origine (e2=0,
![]() ) va impune controlul factorului de amortizare dupa o
procedura similara, deci:
) va impune controlul factorului de amortizare dupa o
procedura similara, deci:
![]()
Algoritmul
de conducere va consta deci într-o aplicare succesiva a ecuatiilor (13.51)
ce determina evolutia catre suprafetele de comutare si
ulterior o modificare a factorului de amortizare, pe diferitele segmente ale
bratului. Aceasta crestere a coeficientului ![]() se va obtine prin
cresterea corespunzatoare a câmpului electric aplicat pe
suprafata lichidului ER. O exemplificare a mecanismului de conducere
este ilustrata în figura 13.23.
se va obtine prin
cresterea corespunzatoare a câmpului electric aplicat pe
suprafata lichidului ER. O exemplificare a mecanismului de conducere
este ilustrata în figura 13.23.
Figura 13.23 Conducerea secventiala distribuita
13.5.4 Control fuzzy
Algoritmul de conducere prezentat mai sus
ofera posibilitatea introducerii unor reguli fuzzy si implementarea
unui controler specific. În acest sens, se vor considera ca marimi de
intrare variabilele erorii ei
si ![]() iar iesirile
controlerului vor fi semnale de activare a presiunii fluidului si a
vâscozitatii acestuia. Se va considera un spatiu normalizat atât
pentru marimile de intrare cât si pentru variabila de iesire
asociata presiunii. Pentru controlul vâscozitatii se va
pastra iesirea nenormalizata. Pentru implementarea controlerului
fuzzy se vor introduce functiile de apartenenta pentru marimile
de intrare si de iesire (Figura 13.24).
iar iesirile
controlerului vor fi semnale de activare a presiunii fluidului si a
vâscozitatii acestuia. Se va considera un spatiu normalizat atât
pentru marimile de intrare cât si pentru variabila de iesire
asociata presiunii. Pentru controlul vâscozitatii se va
pastra iesirea nenormalizata. Pentru implementarea controlerului
fuzzy se vor introduce functiile de apartenenta pentru marimile
de intrare si de iesire (Figura 13.24).
S-au utilizat etichete lingvistice uzuale care sa identifice asocieri cu valorile crisp ale variabilei respective, de exemplu, NB= NEGATICE BIG (NEGATIV MARE) determina o multime fuzzy corespunzatoare domeniilor negative extreme ale variabilelor de intrare sau iesire, NM= NEGATICE MEDIUM, etc.
Regulile de control lingvistic se
determina pe baza algoritmului discutat în paragraful precedent. O
sinteza a acestora poate fi urmarita în Tabelul 13.1. pentru
controlul presiunii fluidului si pentru controlul vâscozitatii.
Figura 13.24 Functii de apartenenta.
Tabelul 13.1 Regulile de control fuzzy.
Caracteristicile principale pot fi sumarizate astfel:
Valori negative ale presiunii sunt plasate deasupra diagonalei principale iar cele pozitive, dedesubt, conform relatiei (13.52).
Valorile fuzzy ale presiunii cresc odata cu distanta fata de diagonala principala si descresc pentru vâscozitate.
Valorile zero ale presiunii si valorile maxime ale vâscozitatii sunt plasate pe diagonala principala.
13.6 Controlul pozitiei prin legi de conducere
conventionale
Modelul matematic discutat în paragraful 13.4. arata clar dificultatea stabilirii unei legi de conducere adecvate datorita complexitatii ecuatiilor ce guverneaza miscarea unei structuri hiper-redundante. Ecuatiile integro-diferentiale, cu componente neliniare dificile de tratat, pun probleme deosebite în determinarea unor solutii corespunzatoare în conducerea sistemului în scopul obtinerii unor performante impuse.
În paragraful precedent s-au folosit câteva metode aproximative care au permis o abordare simplificata a conducerii unui brat tentacul, aproximari ce evident se vor repercuta asupra calitatii conducerii sistemului.
În cadrul acestui paragraf se vor propune câtiva algoritmi care vor permite implementarea unor controlere de tip conventional PD fara a utiliza modelul matematic complicat al bratului mecanic. Metoda se bazeaza pe utilizarea unor criterii energetice pentru un sistem de conducere al carui criteriu de performanta îl constituie atingerea unei pozitii dorite fixe.
13.6.1 Relatii energetice ale unui model tentacular
Pentru simplificarea tratarii se va studia varianta planara OYZ a modelului tentacul ideal, neglijând frecarile si eventualele amortizari interne. Pentru acest model, coordonata principala este unghiul între tangenta la curba modelului si axa OY:
q=q(s)
sau, într-o miscare dinamica, la momentul t:
q=q(s,t)
Figura 13.25 Determinarea relatiilor energetice.
Se va considera ca pozitia initiala a bratului este orizontala, stationara, deci energia cinetica si potentiala va fi zero.
Se va
presupune ca lucrul mecanic pentru miscarea a (l-s) din lungime, din pozitia initiala, este L(l-s). Daca un element ![]() este deplasat printr-un moment M într-o noua pozitie definita printr-un unghi q, la momentul t, noua valoare a lucrului mecanic va fi (Figura 13.25):
este deplasat printr-un moment M într-o noua pozitie definita printr-un unghi q, la momentul t, noua valoare a lucrului mecanic va fi (Figura 13.25):
![]() (13.63)
(13.63)
unde:
![]() (13.64)
(13.64)
iar:
![]() (13.65)
(13.65)
în care s-a presupus ca evolutia bratului este determinata printr-o forta F aplicata normal pe curba C a "coloanei vertebrale" a sistemului.
Relatia (13.63) va deveni:
![]() (13.66)
(13.66)
Se poate defini derivata lucrului mecanic:
![]()
iar din (13.63) rezulta:
![]()
![]()
Prin integrare, se obtine:
![]() (13.68)
(13.68)
unde: ![]()
iar pentru întregul brat, de lungime l:
![]() ,
, ![]() (13.69)
(13.69)
Rezultatul de mai sus poate fi extins
pentru modelul 3-dimensional controlat prin doua forte uniform
distribuite ![]() ,
, ![]() în planul celor
doua coordonate generalizate q(s,t),
în planul celor
doua coordonate generalizate q(s,t),
![]() :
:
![]() (13.70)
(13.70)
Din formula (13.70), prin aplicarea legii conservarii energiei se obtine:
![]()
![]()
unde ![]() si
si ![]() reprezinta energia cinetica
totala si energia potentiala totala la momentul t si 0, respectiv.
reprezinta energia cinetica
totala si energia potentiala totala la momentul t si 0, respectiv.
Din relatia (13.71) se obtine, de asemenea, o formula utila în cele ce urmeaza:
![]()
![]()
13.6.2 Legi de conducere
Pe baza rezultatelor anterioare se va propune un sistem de conducere pentru atingerea unei pozitii dorite fara a utiliza modelul matematic al bratului (figura 13.26).
Controlul pozitiei bratului înseamna controlul miscarii acestuia pentru a atinge o pozitie dorita definita prin curba:
![]() ,
, ![]()
Figura 13.26 Sistemul de conducere pentru atingerea unei pozitii dorite
Eroarea sistemului de conducere se va defini prin:
![]() ,
,![]()
![]() ,
,![]()
a) Conducerea uniform distribuita PD.
Se propune o lege de conducere de forma:
![]()
![]()
unde![]() ,
,![]() sunt
coeficienti pozitivi.
sunt
coeficienti pozitivi.
Sub aceasta forma,
relatiile (13.75) reprezinta o lege de conducere clasica de tip
PD în care marimea de conducere generata, fortele ![]() si
si ![]() sunt uniform distribuite de-a lungul
bratului.
sunt uniform distribuite de-a lungul
bratului.
În scopul de a aprecia calitatea acestui sistem de conducere, nu se va apela la solutia clasica ce implica modelul dinamic extrem de complicat al bratului ci se va utiliza metoda Liapunov într-o constructie speciala [4, 10]. Se va propune urmatoare functia Liapunov.
![]() (13.76)
(13.76)
Evident, V(t) este pozitiv definita întrucât termenii care definesc energiile cinetica si potentiala sunt pozitivi sau zero:
![]()
![]()
Ţinând cont de relatiile energetice stabilite în paragraful anterior, derivata functiei (13.76) va avea forma:
sau, înlocuind expresiile
functiilor de conducere ![]() ,
, ![]() din (13.75),
rezulta:
din (13.75),
rezulta:
![]()
deci:
![]()
ceea ce arata stabilirea sistemului de conducere si evolutia spre zero a erorii.
Pentru ilustrarea acestei metode se vor simula câteva exemple de conducere utilizând tehnica SIMULINK din MATLAB.
Exemplu 1. Se
considera un manipulator tentacul ce opereaza în spatiul de
operare OXYZ. Parametrii mecanici ai sistemului sunt ![]() si lungimea l=0,6m.
Se va considera ca pozitia initiala a bratului este
cea orizontala (axa OY), definita de:
si lungimea l=0,6m.
Se va considera ca pozitia initiala a bratului este
cea orizontala (axa OY), definita de:
![]()
![]()
iar pozitia dorita este reprezentata de o dreapta în spatiul OXYZ definita prin:
![]() ;
; ![]() ;
; ![]()
Legea de conducere este de forma (13.75), unde:
![]()
![]()
Simularea sistemului de ecuatii
integro-diferentiale ale bratului mecanic s-a
realizat utilizând o discretizare a spatiului variabilei s cu un increment ![]() :
:
![]() , i=1,2,...,6
, i=1,2,...,6
iar ecuatiile diferentiale rezultate s-au simulat în MATLAB.
Rezultatele simularii sunt
sugetiv ilustrate în figura 13.27, în care se poate urmari atât
pozitia initiala, cea finala precum si înca zece
pozitii intermediare.
Figura 13.27 Evolutia bratului catre pozitia dorita D
Figura 13.28 Portretul de faza al miscarii.
Pentru o apreciere cantitativa a evolutiei sistemului, în figura 13.28 s-a reprezentat portretul de faza al miscarii, unde s-a considerat eroarea globala a sistemului de conducere definita prin:
![]() (13.81)
(13.81)
![]() (13.82)
(13.82)
Ca si în reprezentarea simulata a evolutiei bratului (figura 13.27) se remarca buna evolutie a sistemului, traiectoria de faza evoluând de la o valoare globala a erorii de cca +7.6 catre dreapta de comutare si de aici catre origine.
Exemplul 2. Un nou test de conducere a fost aplicat aceluiasi brat mecanic, plecând din aceeasi pozitie initiala, dar pentru care pozitia dorita este reprezentata de o curba:
![]() ;
;
![]() ; i=1,2,...,6
; i=1,2,...,6
Legea de conducere are aceeasi forma cu cea utilizata în aplicatia precedenta iar coeficientii au valori date de (13.80). Miscarea bratului, simulata în 3-D, poate fi urmarita în figura 13.29 precizându-se, din nou câteva pozitii intermediare.
Aspectul calitativ al
miscarii este, de asemenea, bine reliefat în evolutia în planul
fazelor din figura 13.30 unde se poate constata aceeasi
convergenta spre origine a erorii si derivatei acesteia.
Figura 13.29 Evolutia bratului catre pozitia dorita C.
Figura 13.30 Portretul de faza al miscarii.
Exemplul 3. O mai buna apreciere a
performantelor sistemului de control poate fi obtinuta daca
se analizeaza modelele planare. În acest sens se va studia miscarea
unui brat tentacular ce evolueaza în planul OXZ. Modelul dinamic este
obtinut din modelul spatial, ecuatiile (13.23), (13.24) pentru ![]() . De asemenea, legea de conducere va avea forma:
. De asemenea, legea de conducere va avea forma:
![]() (13.84)
(13.84)
unde coeficientii ![]() ,
, ![]() sunt
alesi la valorile:
sunt
alesi la valorile:
![]()
![]()
Pozitia initiala va fi considerata axa verticala OZ a sistemului:
![]() ;
; ![]()
iar pozitia dorita este data sub forma unui semicerc care poate fi aproximat prin:
![]()
![]() ; i=1,2,...,6
; i=1,2,...,6
Rezultatele simularii sunt prezentate în figurile 13.31 si 13.32.
În figura 13.31 este
prezentata evolutia bratului în plan precum si câteva
pozitii intermediare iar în figura 4.32 poate fi urmarit portretul de
faza al miscarii.
Figura 13.31 Miscarea bratului în planul XOZ.
Figura 13.32 Portretul de faza al miscarii.
b. Conducerea uniform distribuita PD cu ponderare spatiala
Un sistem de conducere mai performant se obtine printr-o lege de conducere sub forma:
 (13.87)
(13.87)
 (13.88)
(13.88)
 (13.89)
(13.89)
unde ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() sunt coeficienti pozitivi, iar
sunt coeficienti pozitivi, iar ![]() ,
, ![]() reprezinta functii de pondere
spatiala.
reprezinta functii de pondere
spatiala.
Al treilea termen al legii de conducere introduce o functie de ponderare pentru facilitatea conducerii în cazul în care curba ce defineste pozitia dorita a miscarii nu are o forma "neteda" prezentând numeroase "colturi" si elemente de discontinuitate.
Stabilitatea miscarii bratului printr-o conducere de forma (13.87), (13.88) este demonstrata tot prin metoda a doua lui Liapunov utilizând o functie de forma:

![]()
![]() (13.90)
(13.90)
În acest caz se va obtine:
Introducerea legilor de conducere (13.87)
si (13.88) în relatia (13.90) determina o functie ![]() sub forma:
sub forma:
![]()
deci:
![]()
Pentru ilustrare acestei legi de conducere se va simula sistemul pe un exemplu planar.
Exemplu 4. Se considera un brat ce evolueaza în planul XOZ, plecând din pozitia initiala, axa verticala OZ iar pozitia dorita este data de forma S definita prin:
![]()
![]() ;
;![]() ;
;![]() ;
;
![]() ;
;![]() ;
; ![]() ; (
; (
Se propune o lege de control (13.88) la care coeficientii sunt alesi în forma:
![]()
![]()
Evolutia bratului
poate fi urmarita în figura 13.33, iar portretul de faza asociat
în figura 13.34.
Figura 13.33 Miscarea bratului pe pozitia dorita S
Figura 13.34 Portretul de faza al miscarii
13.7 Alegerea parametrilor sistemului de conducere
Alegerea anterioara a aratat ca legile de conducere adoptate, fie sub forma (13.75), fie sub forma (13.87), (13.88), determina stabilitatea miscarii fara a lua în consideratie complexitatea sistemului dinamic. Cu toate acestea, obtinerea unor performante corespunzatoare impune introducerea unor criterii care sa permita alegerea coeficientilor legilor de conducere.
În acest caz nu va fi suficienta abordarea sistemului numai sub aspect energetic ci va fi necesara utilizarea modelului matematic infinit dimensional.
Pentru simplificarea tratarii se va analiza modelul planar al unui brat, ecuatia (13.80) pentru care coordonata generalizata este variabila q(s,t). Se vor impune, de asemenea, urmatoarele restrictii:
a. miscarea sistemului corespunde unor deplasari "mici":
![]() ,
, ![]() ,
, ![]() ,
, ![]()
unde ![]() este o
este o
b. controlul miscarii este un control secvential spatial, în sensul ca pozitia dorita a bratului este atinsa treptat, pas cu pas, începând cu primul element (baza) catre elementul final.
c.
O
discretizare spatiala ![]() , i=1,2,...,N se utilizeaza pentru trans-formarea
ecuatiei integrale în ecuatie diferentiala.
, i=1,2,...,N se utilizeaza pentru trans-formarea
ecuatiei integrale în ecuatie diferentiala.
În acest caz, în spatiul erorilor, ecuatiile de miscare devin:
 , i=1,2,...,N (13.97)
, i=1,2,...,N (13.97)
unde:
![]() (13.98)
(13.98)
 (13.99)
(13.99)
iar H=H(q) este determinat de componenta gravitationala:
![]() (13.100)
(13.100)
Ecuatia (13.97) poate fi
rescrisa în termenii clasici ai factorului de amortizare ![]() si ai pulsatiei
naturale
si ai pulsatiei
naturale ![]() :
:
![]()
unde:
![]()
![]()
![]()
Pentru modelul aproximat (13.100) se
propune o conducere de tipul DSMC (Direct Sliding Mode Control) [8], o
forma specifica a controlului în regim alunecator, de-a lungul
unei drepte de comutare, prin modificarea factorului de amortizare ![]() . Evolutia sistemului este compusa din doua
parti: evolutie libera spre dreapta de comutare si o
evolutie fortata pe dreapta de comutare.
. Evolutia sistemului este compusa din doua
parti: evolutie libera spre dreapta de comutare si o
evolutie fortata pe dreapta de comutare.
Figura 13.35 Controlul DSMC
Se va presupune ca dreapta de comutare este definita de relatia:
 (13.103)
(13.103)
Iar conditiile de miscare pe dreapta vor fi [4, 8]:
![]() (13.104)
(13.104)
si
![]() (13.105)
(13.105)
De exemplu, pentru miscarea
simulata din Exemplu 3,
daca se alege o pulsatie naturala ![]() , i=1,2,...,6 atunci conditiile (13.104) si (13.105)
vor fi verificate pentru:
, i=1,2,...,6 atunci conditiile (13.104) si (13.105)
vor fi verificate pentru:
![]() , i=1,2,...,6
, i=1,2,...,6
ceea ce va determina o alegere a coeficientilor:
![]()
![]() , i=1,2,...,6
, i=1,2,...,6
Utilizarea acestor coeficienti a permis obtinerea miscarii simultate din figurile 13.31 si 13.32.
Daca pozitia dorita a bratului are forme mai dificil de controlat (de exemplu - forma S din 13.33) se impune introducerea unor functii de penalizare. O alegere posibila a acestor functii ar fi cea legata de penalizarea distantei între pozitiile sistemului si cele dorite în punctele critice ale miscarii, de exemplu:
![]() , i=1,2,...,6 (13.106)
, i=1,2,...,6 (13.106)
Implemenatarea acestei legi a determinat evolutia prezentata în figurile 13.33 si 13.34.
13.8 Conducere fuzzy
Sistemul de conducere dezvoltat în paragrafele anterioare permite introducerea metodelor fuzzy în implementarea controlerelor. Se vor analiza separat doua cazuri, când pozitia dorita este stationara si cazul în care pozitia dorita este variabila în timp.
a. Pozitia dorita stationara.
Se va considera ca fortele
distribuite ![]() ,
, ![]() sunt generate
de un controler fuzzy:
sunt generate
de un controler fuzzy:
![]() (13.107)
(13.107)
![]() (13.108)
(13.108)
Utilizând aceeasi functie Liapunov ca si în paragraful (4.7) se obtine:
O conditie suficienta de stabilitate poate fi dedusa sub forma:
![]()
![]()
![]()
Daca se introduce o discretizare
spatiala ![]() , i=0,1,...,N, inegalitatile de mai sus devin:
, i=0,1,...,N, inegalitatile de mai sus devin:
![]()
![]()
unde ![]() ,...,
,...,![]() ,...,
,..., ![]() ,...,
,...,
Conditiile (13.112)
si (13.117) pot reprezenta suportul pentru definirea unei baze de reguli
ale unui controler fuzzy. În acest sens, se vor considera functiile de
apartenenta din figura 13.36 definite pe un spatiu normalizat al
variabilelor ![]() ,
,![]() ,
, ![]() ,
unde NB, NM, NZ, PZ, PM, PB, reprezinta multimile fuzzy NEGATIVE BIG,
NEGATIVE MEDIUM, NEGATIVE ZERO, POSITIVE ZERO, POZITIVE MEDIUM, POSITIVE BIG,
respectiv.
,
unde NB, NM, NZ, PZ, PM, PB, reprezinta multimile fuzzy NEGATIVE BIG,
NEGATIVE MEDIUM, NEGATIVE ZERO, POSITIVE ZERO, POZITIVE MEDIUM, POSITIVE BIG,
respectiv.
Figura 13.36 Functii de apartenenta
|
|
NB |
NM |
NZ |
PZ |
PM |
PB |
|
PB |
NZ |
PZ |
NM |
NM |
NB |
NB |
|
PM |
NZ |
PZ |
NM |
NM |
NB |
NB |
|
PZ |
NZ |
PZ |
NM |
NM |
NB |
NB |
|
NZ |
PB |
PB |
PM |
PM |
PZ |
NZ |
|
NM |
PB |
PB |
PM |
PM |
PZ |
NZ |
|
NB |
PB |
PB |
PM |
PM |
PZ |
NZ |
Tabelul 13.2 Baza de reguli
Baza completa de reguli este reprezentata în tabelul din Tabelul 13.2, regulile fiind astfel selectate încât conditiile de stabilitate (13.110) si (13.111) sa fie respectate.
b. Pozitia dorita variabila în timp.
În acest caz, se va considera ca legile de conducere ale bratului sunt definite sub forma:
![]() (13.114)
(13.114)
![]() (13.115)
(13.115)
unde ![]() si
si ![]() sunt generate
de controlere fuzzy. Din aceeasi conditie de stabilitate Liapunov (4.8.3)
obtinem:
sunt generate
de controlere fuzzy. Din aceeasi conditie de stabilitate Liapunov (4.8.3)
obtinem:
Functia (13.116) este negativ definita daca urmatoarele inegalitati vor fi satisfacute:
![]()
![]()
Pentru obtinerea regulilor fuzzy
pentru cele doua marimi ![]() ,
, ![]() se va adopta un sistem fuzzy ierarhic
cu doua nivele de ierarhizare (figura 13.37). Nivelul 1 are ca variabile
de intrare pe
se va adopta un sistem fuzzy ierarhic
cu doua nivele de ierarhizare (figura 13.37). Nivelul 1 are ca variabile
de intrare pe ![]() ,
, ![]() si
si ![]() ,
, ![]() , respectiv
si genereaza o functie neliniara
, respectiv
si genereaza o functie neliniara ![]() ,
, ![]() , care vor
constitui intrari în al doilea nivel ierarhic împreuna cu vitezele de
miscare
, care vor
constitui intrari în al doilea nivel ierarhic împreuna cu vitezele de
miscare ![]() ,
, ![]() , respectiv.
, respectiv.
Într-o scriere generala,
marimile ![]() ,
, ![]() pot fi puse sub forma:
pot fi puse sub forma:
![]() (13.119)
(13.119)
![]() (13.120)
(13.120)
Se va introduce discretizare spatiala utilizata si în cazurile anterioare:
![]() , i=0,1,2,...,N
, i=0,1,2,...,N
Pentru simplificarea
tratarii si micsorarea efortului de calcul pe domeniile
variabilelor sunt utilizate numai multimile fuzzy de apartenenta
ilustrare în figura 13.38. Cele
doua nivele ierarhice vor impune implementarea a câte 16 reguli pe fiecare
nivel, pentru generarea controlerului (Tabelul 13.3).
Figura 13.37 Controlerul fuzzy cu doua nivele
Figura 13.38 Functii de apartenenta pe fiecare nivel
|
|
N |
NZ |
PZ |
P |
|
P |
N |
N |
P |
P |
|
PZ |
N |
NZ |
PZ |
P |
|
NZ |
P |
PZ |
NZ |
N |
|
N |
P |
P |
N |
N |
|
|
N |
NZ |
PZ |
P |
|
P |
NZ |
NZ |
N |
N |
|
PZ |
NZ |
NZ |
N |
N |
|
NZ |
PZ |
PZ |
P |
P |
|
N |
PZ |
PZ |
P |
P |
Tabelul 13.3 Baza de reguli pentru sistemul cu 2 nivele
Pentru ilustrarea procedurilor dezvoltate mai sus se va considera problema conducerii bratului spre o pozitie dorita definita de:
![]()
![]() ; ,i=0,1,2,...,6 (13.121)
; ,i=0,1,2,...,6 (13.121)
si se va implementa un controler fuzzy de forma (13.108) prin baza de reguli prezentate în figurile 13.36 si 13.37.
Evolutia bratului robotului poate fi urmarita în figura 13.39 iar portretul de faza al miscarii este prezentat în figura 13.40. Se remarca aceeasi buna calitate a miscarii si convergenta spre zero a erorii de pozitie.
Figura 13.39 Evolutia bratului prin controlerul fuzzy
Figura 13.40 Portretul de faza al
miscarii
13.9 O problema de interceptie
În paragrafele anterioare a fost analizata problematica conducerii unui brat tentacular pentru atingerea unei pozitii fixe sau variabile impuse. O problema speciala este cea definita formal ca o problema de "interceptie a unei tinte". Un exemplu tipic al acestei probleme este cel oferit de lumea vie, prinderea unei pasari de un sarpe (figura 13.41). sarpele urmareste pasarea, estimeaza traiectoria de miscare a acesteia si ataca prada interceptând-o într-o anumita pozitie a miscarii.
Într-o transpunere tehnologica, problema de mai sus poate fi reformulata astfel: un brat hiper-redundant tentacular se gaseste într-o pozitie initiala (figura 13.42 a) pe axa OZ. O tinta executa o miscare proprie pe o traiectorie necunoscuta. Un estimator al miscarii analizeaza parametrii tintei pe baza carora un sistem de conducere dirijeaza bratul pentru interceptare.
Figura 13.41 Interceptie în lumea vie.
Figura 13.42 Interceptia unui sistem mecanic
O problema de interceptie este o problema de conducere complexa în care un rol important îl joaca sistemul de estimare, de evaluare, al parametrilor tintei. Se va presupune ca exista un sistem senzorial pentru masurarea parametrilor de miscare ceea ce permite identificarea unui model matematic al tintei.
Pentru simplificarea problemei tratarii se va studia problema de interceptie într-un caz planar, miscarile bratului si tintei având loc în planul XOZ.
Modelul dinamic al bratului este
dat în (13.26) care, dupa discretizare ![]() , i=0,1,2,...,N si în conditiile (13.30) poate fi
rescris [6, 13] sub forma:
, i=0,1,2,...,N si în conditiile (13.30) poate fi
rescris [6, 13] sub forma:
![]() (13.122)
(13.122)
unde M, C sunt matrici (N![]() N), D este un
vector neliniar (N
N), D este un
vector neliniar (N![]() 1):
1):
![]()
![]() (13.123)
(13.123)
![]()
![]()
iar componentele matricei C depind de compozitia interna a bratului, de exemplu, daca se utilizeaza lichide electrorheologice atunci:
![]() (13.124)
(13.124)
![]() (13.125)
(13.125)
![]() (13.126)
(13.126)
unde ![]() definesc parametrii
structurii tehnologice [8],
definesc parametrii
structurii tehnologice [8], ![]() si
si ![]() sunt factorul
sunt factorul
de amortizare echivalent si respectiv pulsatia naturala a sistemului iar E este câmpul electric aplicat pentru controlul vâscozitatii fluidului.
În cele ce urmeaza, vor fi studiate doua cazuri, când parametrii tintei sunt cunoscuti si când acestia sunt necunoscuti si urmeaza sa fie identificati.
a. Parametrii dinamici ai tintei sunt cunoscuti.
Se va considera:
![]() (13.127)
(13.127)
vectorul ce defineste
coordonatele pe traiectorie ale tintei în planul XOZ iar parametrii miscarii vor fi
dati de derivata de ordinul întâi si doi ale acestui vector, ![]() determinând viteza iar
determinând viteza iar
![]() , acceleratia tintei.
, acceleratia tintei.
În principiu determinarea parametrilor bratului manipulatorului într-o pozitie de interceptie a tintei revine la rezolvarea unei ecuatii diferentiale neliniare de forma:
![]() (13.128)
(13.128)
unde J(q) reprezinta matricea Jacobian a bratului. Relatia de mai sus constituie solutia clasica pentru o problema inversa în cazul în care Jacobianul sistemul este nesigular.
Pentru conducerea bratului catre tinta se impune definirea unei erori între valoarea dorita, obtinuta prin rezolvarea ecuatiei (13.128), si parametrii reali de miscare ai bratului tentacular:
![]() (13.129)
(13.129)
Se introduce, de asemenea, o eroare generalizata:
![]() (13.130)
(13.130)
unde:
![]() (13.131)
(13.131)
cu ![]() alese numere întregi si
pozitive. Este evident ca în planul erorilor (e,
alese numere întregi si
pozitive. Este evident ca în planul erorilor (e,![]() ), expresia (13.130) defineste o dreapta.
), expresia (13.130) defineste o dreapta.
Introducerea variabilei s permite definirea problemei de interceptie sub forma urmatoare: "tinta" cu parametrii de pozitie (13.127) se considera interceptata daca:
![]() (13.132)
(13.132)
În scopul rezolvarii problemei se propune un sistem de conducere definit prin:
![]() (13.133)
(13.133)
unde K este o matrice ![]() N) iar u este un
vector suplimentar de conducere. Pentru determinarea conditiilor impuse
matricilor K si vectorului u se rescrie modelul dinamic al
bratului (13.122):
N) iar u este un
vector suplimentar de conducere. Pentru determinarea conditiilor impuse
matricilor K si vectorului u se rescrie modelul dinamic al
bratului (13.122):
![]() (13.134)
(13.134)
care, dupa câteva transformari, devine:
![]() (13.135)
(13.135)
unde ![]() este un vector neliniar (N
este un vector neliniar (N![]() 1) definit pe parametrii miscarii bratului
si tintei.
1) definit pe parametrii miscarii bratului
si tintei.
Pentru satisfacerea conditiei (13.132) se va considera o functie Liapunov de forma:
![]() (13.136)
(13.136)
unde P este o matrice pozitiv definita si simetrica. Urmând procedura clasica a metodei a II-a a lui Liapunov se obtine:
![]() (13.137)
(13.137)
sau, tinând cont de (13.135):
 (13.138)
(13.138)
Daca se alege K astfel încât ![]() sa fie o
matrice stabila, atunci se va putea întotdeauna gasi o matrice Q
pozitiv definita astfel încât:
sa fie o
matrice stabila, atunci se va putea întotdeauna gasi o matrice Q
pozitiv definita astfel încât:
![]()
ultimul termen al expresiei (13.138) este determinat de vectorul de conducere u.
Daca se introduce conditia:
![]()
![]()
atunci din relatia (13.138) se obtine:
![]() (13.141)
(13.141)
unde ![]() este cea mai mica valoare proprie a
matricei Q.
este cea mai mica valoare proprie a
matricei Q.
Rezumând rezultatele de mai sus, problema de interceptie se reduce la introducerea unei legi de conducere sub forma (13.133) în care matricea K sa asigure stabilitatea matricei compuse:
![]()
iar componenta u sa verifice o relatie de forma (13.140). Forma particulara a conditiei (13.140) sugereaza introducerea unui controler fuzzy pentru generarea vectorului u.
Algoritmul
fuzzy va considera pe si
si Hi ca variabile de
intrare iar ui este iesirea (fuzzy). Functiile de
apartenenta asociate, definite pe spatiile nenormalizate ![]() si
si ![]() , respectiv,
sunt reprezentate în figura
13.43. Conditia (13.140) permite implementarea bazei de reguli din Tabelul
13.4.
, respectiv,
sunt reprezentate în figura
13.43. Conditia (13.140) permite implementarea bazei de reguli din Tabelul
13.4.
Figura 13.43 Functii de apartenenta
|
|
NB |
NM |
NZ |
PZ |
PM |
PB |
|
|
Z |
Z |
Z |
NB |
NB |
NB |
|
|
Z |
Z |
Z |
NB |
NB |
NB |
|
|
Z |
Z |
Z |
NB |
NB |
NB |
|
|
PM |
PM |
PM |
NB |
NB |
NB |
|
|
PM |
PM |
PM |
NM |
NM |
NM |
|
|
PB |
PB |
PB |
NM |
NM |
NM |
|
|
PB |
PB |
PB |
Z |
Z |
Z |
|
|
PB |
PB |
PB |
Z |
Z |
Z |
|
|
PB |
PB |
PB |
Z |
Z |
Z |
Tabelul 13.4 Baza de reguli a controlerului fuzzy.
Regulile bazei asigura o
miscare stabila în sensul dat de (13.130), evolutia în planul
erorilor (e,![]() ) putând fi una de tipul celei prezentate în figura 13.44a.
De fapt, miscarea de acest fel corespunde unui proces de interceptie
de tipul unei oscilatii amortizate care în foarte multe cazuri sa nu
corespunda unor cerinte de calitate. O procedura de
interceptie calitativ superioara poate fi obtinuta pentru o
evolutie de tipul celei descrise în figura 13.44b. Aceasta corespunde
metodei DSMC (Direct Sliding Mode Control) descrisa în paragraful 13.6.
Miscarea de interceptie este fragmentata în doua
parti, una prin control fuzzy conventional; variabila u, iar a doua, dupa atingerea
dreptei de comutare, direct catre origine, de-a lungul dreptei, prin
modificarea factorului de amortizare echivalent, deci a vâscozitatii
fluidului.
) putând fi una de tipul celei prezentate în figura 13.44a.
De fapt, miscarea de acest fel corespunde unui proces de interceptie
de tipul unei oscilatii amortizate care în foarte multe cazuri sa nu
corespunda unor cerinte de calitate. O procedura de
interceptie calitativ superioara poate fi obtinuta pentru o
evolutie de tipul celei descrise în figura 13.44b. Aceasta corespunde
metodei DSMC (Direct Sliding Mode Control) descrisa în paragraful 13.6.
Miscarea de interceptie este fragmentata în doua
parti, una prin control fuzzy conventional; variabila u, iar a doua, dupa atingerea
dreptei de comutare, direct catre origine, de-a lungul dreptei, prin
modificarea factorului de amortizare echivalent, deci a vâscozitatii
fluidului.
Figura 13.44 a - miscarea de interceptie conventionala
b - miscarea de interceptie DSMC.
b. Parametrii dinamici ai tintei sunt partial necunoscuti.
Se va studia, în continuare cazul în care parametrii dinamici sunt cunoscuti numai partial, de obicei sistemul de conducere contine un senzor ultrasonic sau infrarosu care permite detectarea pozitiei tintei. Pentru identificarea celorlalti parametrii, viteza si acceleratia se utilizeaza un observer al miscarii. Spre deosebire de metodele clasice abordate în literatura, se va considera acum cazul în care masurarea pozitiei va fi obtinuta ca o multime fuzzy iar observerul introdus va genera marimile de iesire, de exemplu viteza ca o marime crisp.
Se va considera ca tinta este definita printr-un model de tipul Takagi-Sugeno iar dinamica miscarii este descrisa prin reguli IF-THEN de forma:
Regula i
IF
![]() este F1i
AND ... AND
este F1i
AND ... AND ![]() este F1p
este F1p
THEN
 (13.143)
(13.143)
unde Fij (i=1,2,...,r;j=1,2,...,p) sunt multimi fuzzy,
x(t)![]() , u(t)
, u(t)![]() , yi(t)
, yi(t)![]() iar
iar ![]() ,...,
,..., ![]() sunt variabilele masurabile ale
sistemului.
sunt variabilele masurabile ale
sistemului.
Starea finala a sistemului fuzzy este reprezentata de ecuatiile [11]:
![]()
![]()
unde:
![]()
 (13.147)
(13.147)
![]()
iar ![]() reprezinta gradul lui
reprezinta gradul lui ![]() în
fuctia de apartenenta a lui
în
fuctia de apartenenta a lui ![]() .
.
Este evident ca vor fi satisfacute conditiile:
![]()
![]() (
(
![]()
![]() pentru orice t
pentru orice t
Pentru estimarea parametrilor se va considera un observer definit de ecuatia [13]:
![]()
unde
![]() ,
, ![]() ,
, ![]()
![]() ,
, ![]()
Modelul definit de relatia (13.150) va reprezenta un observer al sistemului (13.144), (13.145) daca eroarea:
![]() (13.151)
(13.151)
verifica conditia:
![]() (13.152)
(13.152)
Conditia de stabilitate de mai sus poate fi reformulata în modul urmator:
sau în raport cu eroare e
![]()
Daca se alege un functie Liapunov:
![]() (13.155)
(13.155)
unde P este o matrice pozitiv definita si simetrica, ![]() , se obtine:
, se obtine:
 (13.156)
(13.156)
Daca se aleg matricile A, B astfel încât:
![]()
![]()
si daca matricea K este astfel aleasa încât matricea (A+K) sa fie stabila, atunci, din relatia (13.156) obtinem:
![]() (13.158)
(13.158)
unde ![]() este valoare minima a matricei
Q, solutie a ecuatiei:
este valoare minima a matricei
Q, solutie a ecuatiei:
![]()
Satisfacerea conditiilor (13.157) precum si alegerea unei matrici K astfel încât matricea (A+K) sa fie stabila da posibilitatea evaluarii parametrilor miscarii prin vectorul z. Cunoasterea acestor parametrii permite ulterior introducerea metodelor de interceptie dezvoltate la sectiunea precedenta. Pentru ilustrarea problemei de interceptie se va considera, pentru început cazul în care parametrii tintei sunt cunoscuti si un algoritm fuzzy de interceptie de tipul celui discutat la sectiunea a) este implementat.
Se considera bratul robotului aflat initial în pozitie verticala (axa OZ - figura 13.45) iar tinta, în planul XOZ este definita prin urmatorii parametrii:
![]()
![]()
![]()
![]()
![]()
![]()
Se va considera un spatiu nenormalizat pentru variabilele s, H, u:
![]()
![]()
![]()
Figura 13.45 Interceptie în plan XOZ
Baza de reguli se obtine prin particularizarea bazei de reguli din Tabelul 13.4 iar functiile de apartenenta au forma prezentata în figura 13.43. Rezultatele simularii sunt prezentate în figurile 13.46 si 13.47. În figura 13.46 se pot urmarii traiectoriile tintei si ale bratului (punctul terminal), iar în figura 13.47 este prezentat portretul de faza al miscarii. S-a realizat o interceptie rapida printr-o evolutie pe dreapta de comutare iar convergenta catre zero a erorii indica calitatea ridicata a procesului de interceptie.
Figura 13.46 Traiectorii în procesul de interceptie
Figura 13.47 Potretul de faza al interceptiei
În continuare se va studia cazul în care sistemul este prevazut numai cu un senzor pentru masurarea pozitiei iar un observer este utilizat pentru identificarea celorlalti parametrii.
Se va considera ca tinta este definita printr-un model dinamic de ordin doi (ecuatiile 13.143) unde Ai, Bi, Ci au forma:
![]() ; (13.161)
; (13.161)
![]() ;
; ![]()
Multimile fuzzy F1i, F2i sunt prezentate în figura 13.48 în care s-a considerat ca:
![]() ;
; ![]()
Parametrii a1i, a2i, bi sunt determinati ca marimi de iesire ale unei proceduri de inferenta cu functiile de aparetenenta prezentate în Figura 13.49.
Figura 13.48 Functiile de apartenenta pentru F1i, F2i.
Figura 13.49 Functiile de apartenenta pentru a1i, a2i, bi
Se propune un model pentru observerul sistemului de forma (13.150) unde A, B sunt selectati conform conditiei de stabilitate a matricei (A+K):
![]()
Rezultatele procedurii sunt prezentate în figurile 13.50 si 13.51,
prima ilustrând evolutia în spatiu a tintei si a
traiectoriei "estimate" prin identificarea parametrilor iar în a doua figura este prezentat
portretul de faza asociat. Cu toata apartenenta "haotica" a
traiectoriei se remarca convergenta spre zero a erorii procesului de
interceptie.
Figura 13.50 Traiectoriile de interceptie
Figura 13.51 Portretul de faza
13.10 Sisteme de conducere cooperativa
Sectiunile precedente ale acestui capitol au pus în evidenta complexitatea sistemelor implicate în conducerea unei structuri hiper-redundante pentru probleme de control care implica miscarea unui singur tentacul în conditiile în care obiectul conducerii este formulat într-o pozitie finala dorita, fie printr-o interceptie a unei tinte stationare sau mobile.
O problema cu specific deosebit se obtine în cazul în care se pune problema cooperarii a doi sau mai multi roboti în scopul realizarii unei actiuni comune.
13.10.1 Formularea problemei
Se va considera sistemul
multi-brat tentacular din figura 13.52.
Sistemul cuprinde K structuri hiper-redundante
fixate pe aceeasi baza ce efectueaza o sarcina impusa,
deplasarea în comun a unui obiect pe o traiectorie dorita. Este evident
ca, pe lânga problemele complexe ale controlului miscarii
fiecarui brat, apar în plus si cele legate de conducerea
cooperanta a acestora astfel încât în punctele terminale sa fie
exercitata o anumita forta ce va putea asigura
miscarea impusa a obiectului-sarcina.
Figura 13.52 Sistemul multi-cooperativ
Studiul acestor probleme va fi tratat, în primul rând, pe un sistem cooperativ planar format din doua brate ce opereaza în planul XOZ (figura 13.53).
Figura 13.53 Sistemul cooperativ planar
Modelul dinamic al sistemului este derivat din ecuatiile dinamice ale bratului, prezentate în paragrafele precedente, la care se adauga termenii determinati de forta de contact între terminalul bratului si robot [12]:
 (13.163)
(13.163)
 , j=1,2,... (13.164)
, j=1,2,... (13.164)
unde notatiile sunt aceleasi cu cele prezentate în prima parte a capitolului, variabila spatiala s este definita pe lungimea fiecarui brat:
![]() , j=1,2,...
, j=1,2,...
coordonatele si fortele generalizate sunt:
![]() ,
, ![]() ,
, ![]()
![]() ,
, ![]() ,
, ![]() , j=1,2,...
, j=1,2,...
iar ![]() este forta
distribuita în jurul bratului ce determina forta Fj în punctul terminal al bratului.
Relatiile între
este forta
distribuita în jurul bratului ce determina forta Fj în punctul terminal al bratului.
Relatiile între ![]() si Fj sunt stabilite de
ecuatia (13.164) si sunt determinate de principiul de conservare al
energiei mecanice. Se neglijeaza frecarile în punctele terminale,
fata de obiect, si nu sunt luate în calcul energiile determinate
de elasticitatea componentelor. Toate aceste marimi sunt exprimate în
sistemele de coordonate asociate fiecarui brat.
si Fj sunt stabilite de
ecuatia (13.164) si sunt determinate de principiul de conservare al
energiei mecanice. Se neglijeaza frecarile în punctele terminale,
fata de obiect, si nu sunt luate în calcul energiile determinate
de elasticitatea componentelor. Toate aceste marimi sunt exprimate în
sistemele de coordonate asociate fiecarui brat.
13.10.2 Sistemul de conducere
Strategia de control este o strategie pe doua nivele ierarhice, un nivel superior care asigura controlul cooperarii bratelor în scopul efectuarii miscarii dorite, pe traiectorie, a obiectului-sarcina, si un nivel inferior care determina miscarea individuala a fiecarui brat.
În cadrul nivelului superior, obiectivul sistemului este sa asigure evolutia pe traiectorie a sarcinei prin forta generala aplicata acesteia:
![]() (13.165)
(13.165)
unde F0 este forta rezultanta exprimata în
sistemul de referinta absolut, Fj
sunt fortele exercitate în terminalul fiecarui brat, iar ![]()
![]() este o matrice de transformare din sistemul de
coordonate al bratului j în cel absolut. Dinamica miscarii
sarcinei, pe traiectorie, este data de o relatie de forma:
este o matrice de transformare din sistemul de
coordonate al bratului j în cel absolut. Dinamica miscarii
sarcinei, pe traiectorie, este data de o relatie de forma:
![]() (13.166)
(13.166)
unde M este masa obiectului, iar r defineste vectorul de coordonate al acestuia:
![]() (13.167)
(13.167)
r=r(t) desemnând ecuatia traiectoriei obiectului. Conditiile pentru determinarea fortelor Fj din ecuatiile (13.165), (13.166) se completeaza cu restrictiile impuse sub
forma:
![]() (13.168)
(13.168)
Aceste inegalitati sunt impuse de frecarile sistemului, limitarile energetice ale fortelor aplicate, etc. În unele cazuri, calculul fortelor Fj se completeaza cu o problema de optimizare:
![]()
unde ![]() este indicele de optim
impus de obicei dupa criterii de energie minima. Relatiile (13.165),
(13.166), (13.168), (13.169) formeaza suportul de calcul pentru
determinarea fortelor de contact între punctele terminale ale
bratelor si obiect.
este indicele de optim
impus de obicei dupa criterii de energie minima. Relatiile (13.165),
(13.166), (13.168), (13.169) formeaza suportul de calcul pentru
determinarea fortelor de contact între punctele terminale ale
bratelor si obiect.
Pentru implementarea strategiei de control la al doilea nivel ierarhic, inferior, se va utiliza modelul aproximat al unui brat tentacular, folosind aceeasi tehnica ca cea dezvoltata în sectiunile 13.5, 13.6:
![]() , j=1,2,... (13.170)
, j=1,2,... (13.170)
unde indicele j desemneaza bratul si se ataseaza tuturor variabilelor asociate:
![]()
![]() (13.171)
(13.171)
![]()
iar Mj, Cj, Dj, sunt matrici (n![]() n), (n
n), (n![]() n), (n
n), (n![]() 2) respectiv.
2) respectiv.
În general fortele de contact ![]() sunt de evaluat exact, asupra lor
impunându-se, de obicei, o restrictie de forma:
sunt de evaluat exact, asupra lor
impunându-se, de obicei, o restrictie de forma:
![]()
 (13.172)
(13.172)
unde ![]() ,
, ![]() sunt
constante pozitive, iar
sunt
constante pozitive, iar ![]() ,
, ![]() definesc valorile maxime estimate ale
acestor forte.
definesc valorile maxime estimate ale
acestor forte.
Problema conducerii, la acest nivel ierarhic, consta în determinarea fortelor Fj astfel ca traiectoria reala a sistemului global (obiect plus brate) sa convearga catre traiectoria dorita. Pentru rezolvarea acestei probleme se va considera sistemul din figura 13.54 în care qdj, Fdj desemneaza valorile dorite ale pozitiei si fortei, respectiv iar qj, Fj, valorile reale masurate.
Eroarea, pe traiectorie, va fi:
![]() (13.173)
(13.173)
![]()
unde a fost eliminat indicele j, pentru simplificarea scrierii.
Sistemul de conducere cuprinde
doua parti: un controler conventional care
implementeaza o strategie clasica de conducere si un controler
fuzzy conectat în paralel cu primul.
Figura 13.54 Sistemul de conducere
În concordanta cu aceasta structura, legea de conducere va avea forma:
![]()
unde s desemneza variabila în planul fazelor:
![]() (13.176)
(13.176)
![]() ,
, ![]()
![]()
K este o matrice (n![]() n), H
reprezinta componentele neliniare definite de-a lungul valorilor dorite,
iar uF este componenta de
control generata de controlerul fuzzy.
n), H
reprezinta componentele neliniare definite de-a lungul valorilor dorite,
iar uF este componenta de
control generata de controlerul fuzzy.
Pentru a gasi conditiile impuse componentelor sistemului de conducere se analizeaza ecuatia (13.170) de-a lungul traiectoriei dorite:
![]() (13.178)
(13.178)
care poate fi rescrisa sub forma:
![]() (13.179)
(13.179)
sau
![]()
![]() (13.180)
(13.180)
Pentru a gasi conditiile de stabilitate ale miscarii se va considera o functie Liapunov de forma:
![]() (13.181)
(13.181)
Aplicând procedura obisnuita utilizata în aceasta metoda se obtine:
![]() (13.182)
(13.182)
Daca se introduce legea de conducere (13.175) rezulta:
![]()
Presupunând ca urmatoarele conditii sunt îndeplinite:
![]() pozitiv definita (13.184)
pozitiv definita (13.184)
![]() , i=1,2,3,... (13.185)
, i=1,2,3,... (13.185)
![]() (13.186)
(13.186)
Relatia (13.182) determina ca:
sau:
![]()
unde ![]() este valoarea proprie minima a
lui
este valoarea proprie minima a
lui ![]() .
.
Conditia (13.184) impune matricea de conducere K a buclei conventionale iar relatiile (13.185) si (13.186) permit introducerea unui controler fuzzy. Forma particulara a lui (13.185) sugereaza un controler derivat dintr-un controler cu structura variabila la care iesirea creste proportional cu distanta fata de o dreapta de comutare de forma (13.176).
Se va considera un spatiu normalizat:
![]() (13.188)
(13.188)
unde
![]()
![]()
reprezentând factorii de scala corespunzatori.
Baza de reguli este data în tabelul din Tabelul 13.5 iar functiile de apartenenta utilizate sunt prezentate în figura 13.55, etichetele lor având simbolurile conventionale.
|
|
NBE |
NSE |
ZRE |
PSE |
PBE |
|
PBDE |
ZRC |
NBC |
NBC |
NBC |
NBC |
|
PSDE |
PBC |
ZRC |
NSC |
NSC |
NBC |
|
ZRDE |
PBC |
PSC |
ZRC |
NSC |
NBC |
|
NSDE |
PBC |
PSC |
PSC |
ZRC |
NBC |
|
NBDE |
PBC |
PBC |
PBC |
PBC |
ZRC |
Tabelul 13.5 Baza de reguli
Figura 13.55 Functii de apartenenta
Pentru exemplificare se va
considera cazul a doi manipulatori planari ce deplaseaza pe o traiectorie impusa
un corp. Fiecare manipulator este format din 7 elemente de lungime ![]() . Obiectul, sarcina miscarii, are masa m=1kg
si lungime l=0.2m. Pozitia initiala a manipulatoarelor este
data în Figura 13.56.
. Obiectul, sarcina miscarii, are masa m=1kg
si lungime l=0.2m. Pozitia initiala a manipulatoarelor este
data în Figura 13.56.
Figura 13.56 Miscare cooperativa planara - exemplu
Traiectoria dorita este impusa sub forma unei elipse:
![]()
unde x0 =0.2m, z0 =0.1m, a =0.3, b =0.1,
![]() rad/sec. Se remarca faptul ca traiectoria
apartine anvelopei de lucru a celor doua manipulatoare si nu
contine singularitati.
rad/sec. Se remarca faptul ca traiectoria
apartine anvelopei de lucru a celor doua manipulatoare si nu
contine singularitati.
Resctrictiile asupra fortei sunt:
![]() N
N
![]() N
N
iar incertitudinile asupra masei sarcinii sunt date sub forma:
![]() kg
kg
Pentru calculul fortei în punctul de contact se utilizeaza un criteriu de forma patratica:
min![]() ; min
; min![]()
Figura 13.57 Evolutia factorului k
Figura 13.58 Portretul de faza
Figura 13.59 Evolutia pe traiectorie
Traiectoria dorita se obtine prin rezolvarea ecuatiei [24],
![]() (13.191)
(13.191)
unde w=(x,y)T iar J(q) este matricea Jacobian a bratului. Evolutia parametrului k în controlerul conventional este prezentat în figura 13.57 iar portretul de faza al miscarii si evolutia pe traiectorie sunt prezentate în figurile 13.58 si 13.59, respectiv.
|
